شما در حال مطالعه نسخه آفلاین یکی از مطالب «مجله فرادرس» هستید. لطفاً توجه داشته باشید، ممکن است برخی از قابلیتهای تعاملی مطالب، مانند امکان پاسخ به پرسشهای چهار گزینهای و مشاهده جواب صحیح آنها، نمایش نتیجه آزمونها، پاسخ تشریحی سوالات، پخش فایلهای صوتی و تصویری و غیره، در این نسخه در دسترس نباشند. برای دسترسی به نسخه آنلاین مطلب، استفاده از کلیه امکانات آن و داشتن تجربه کاربری بهتر اینجا کلیک کنید.
یکی از مهمترین ورودیهای تست سیستم، تابع پله واحد (Unit Step Function) است. پاسخ یک سیستم با شرایط اولیه صفر یا به عبارت دیگر، پاسخ حالت صفر (Zero State Response) یک سیستم به ورودی پله واحد را پاسخ پله واحد میگویند. البته اگر سیستم مورد بررسی دارای شرایط اولیه غیر صفر باشد، نیاز است که برای به دست آوردن پاسخ کامل، پاسخ ورودی صفر را نیز محاسبه کرد. در این مطلب میخواهیم به بررسی پاسخ پله (Unit Step Response) برای سیستم درجه یک، سیستم درجه دو و سیستمهای درجه بالاتر بپردازیم.
اگر در یک سیستم ورودی برابر با x(t)، خروجی برابر با y(t) و تابع انتقال H(S) باشد، آنگاه میتوان نوشت:
H(S)=X(S)Y(S)
در این سیستم، خروجی با شرایط اولیه صفر یا به عبارت دیگر خروجی حالت صفر، به سادگی با فرمول زیر محاسبه میشود:
Y(S)=X(S)H(S)
بنابراین، پاسخ پله واحد Yγ(S) به صورت زیر محاسبه میشود:
Yγ(S)=S1H(S)
حال با اعمال قضیه مقدار اولیه و مقدار نهایی، میتوانیم دو مشخصه بسیار مهم از پاسخ پله واحد، یعنی مقادیر اولیه و نهایی آن را تعیین کنیم. بر همین اساس، مقدار اولیه تابع برابر است با:
یک تابع انتقال مرتبه اول عمومی را در نظر بگیرید که توسط رابطه زیر توصیف میشود:
H(S)=S+ab.S+c
در این سیستم، a و b و cاعداد حقیقی هستند و یکی از مقادیر b یا c ممکن است برابر با صفر باشند، اما هر دو با هم صفر نمیشوند. برای به دست آوردن پاسخ پله واحد، H(S) را در S1 ضرب میکنیم:
حال میتوان مشخصههای بسیاری را از این معادله به دست آورد:
Yγ(0+)=H(∞)=b
Yγ(∞)=H(0)=ac
τ=a1
بنابراین میتوان فرم عمومی پاسخ پله واحد سیستم را به صورت زیر نوشت:
Yγ(t)=Yγ(∞)+(Yγ(0+)−Yγ(∞))e−τt
=H(0)+(H(∞)−H(0))eτ−t
معادلات فوق از اهمیت بالایی برخوردارند. بر اساس این معادلات میتوان نتیجه گرفت که اگر بتوان مقادیر اولیه یک سیستم مرتبه اول را در t=0+ تعیین کرد، آنگاه میتوان مقدار نهایی و نیز ثابت زمانی سیستم را به دست آورد و برای این کار به حل هیچ معادلهای نیاز نداریم. به طریق مشابه، اگر بتوانیم مقادیر اولیه سیستم را از راه تجربی به دست آوریم و سپس مقدار نهایی و ثابت زمانی را تعیین کنیم، آنگاه میتوانیم تابع انتقال کلی سیستم را محاسبه کرد.
ثابت زمانی سیستم مرتبه اول
محاسبه ثابت زمانی سیستم مرتبه اول معمولا ساده است. ثابت زمانی برخی از سیستمهای متداول در جدول زیر آورده شدهاند.
ثابت زمانی
نوع سیستم
m/b
سیستم انتقالی جرم و دمپر
b/k
سیستم انتقالی دمپر و فنر
J/Br
سیستم دورانی چرخ و دمپر
Br/Kr
سیستم دورانی چرخ و فنر
R.C
مدار خازن و مقاومت
L/R
مدار خازن و سلف
R.C
حرارتی
مثال ۱
اگر نیروی ورودی سیستم زیر برابر با پله واحد باشد، آنگاه v(t) را محاسبه کنید.
سیستم مثال ۱
دیاگرام نیروها در این سیستم به صورت زیر نشان داده شده است.
دیاگرام نیروها
حل اول
معادله دیفرانسیل توصیف کننده سیستم برابر است با:
mv˙+bv=f(t)
بنابراین تابع انتقال را با اعمال تبدیل لاپلاس (با شرایط اولیه صفر) و حل کردن V(S)/F(S) به دست میآوریم:
mSV(S)+bV(S)=F(S)
F(S)V(S)=H(S)=ms+b1=s+b/m1/m
برای به دست آوردن پاسخ پله واحد، تابع انتقال را در تبدیل لاپلاس پله واحد یعنی S1 ضرب میکنیم و سپس معادله را با نگاه کردن به جدول تبدیل لاپلاس و یافتن معکوس حل میکنیم:
V(S)=F(S)H(S)=S1s+b/m1/m
v(t)=b1(1−e−(mb)t)
با فرض کردن m=b=1، جواب به صورت زیر به دست میآید.
پاسخ پله سیستم مثال یک
حل دوم (بدون نیاز به لاپلاس معکوس)
با استفاده از تابع انتقال میتوان اطلاعات زیر را به دست آورد:
V(0+)=H(∞)=0
V(∞)=H(0)=b1
τ=bm
حال با استفاده از فرم عمومی پاسخ پله واحد سیستمهای مرتبه اول، به رابطه زیر دست مییابیم:
v(t)=v(∞)+(v(0+)−v(∞))e−τt
=H(0)+(H(∞)−H(0))eτ−t
=b1+(0−b1)e−mbt
=b1(1−e−mbt)
همچنین میتوان از روش زیر استفاده کرد.
سیستم از حالت سکون شروع به حرکت میکند و سرعت جرم در سیستم فوق نمیتواند با یک ورودی محدود، به صورت آنی تغییر کند، بنابراین v(0+)=0. سرعت نهایی از جرم مستقل است؛ زیرا هیچ نیروی شتابی در سرعت ثابت وجود ندارد.
ثابت زمانی یک سیستم جرم و دمپر برابر با bm است. بنابراین:
v(t)=b1(1−e−mbt)
مثال ۲
اگر نیروی ورودی سیستم زیر، یک پله با دامنه X0 باشد، آنگاه خروجی y(t) را به دست آورید.
سیستم مثال ۲
حل اول
توجه کنید که ورودی سیستم، تابع پله واحد نیست، بلکه دارای دامنه X0 است. بنابراین تمام خروجی سیستم نیز باید دارای مقیاس X0 باشد. معادله دیفرانسیل توصیف کننده سیستم به صورت زیر نوشته میشود:
by˙+ky=−bx˙(t)
بنابراین تابع انتقال را با اعمال تبدیل لاپلاس به طرفین معادله محاسبه میکنیم و سپس نسبت X(S)Y(S) را به دست میآوریم:
X(S)Y(S)=H(S)=−S+bkS
برای به دست آوردن پاسخ پله واحد، تابع انتقال را در تابع پله با دامنه X0 یعنی SX0 ضرب میکنیم. سپس معادله را با جست و جو در جدول تبدیل لاپلاس و محاسبه لاپلاس معکوس به دست میآوریم:
X(S)Y(S)=H(S)=−SX0S+bkS
=−S+bkX0
=y(t)=−X0e−bkt
به ازای مقادیر k=b=1 و X0=2، جواب زیر برای این سیستم به دست میآید.
پاسخ پله سیستم مثال ۲
حل دوم (بدون نیاز به تبدیل لاپلاس معکوس)
با استفاده از تابع انتقال، میتوان ویژگیهای زیر را به دست آورد:
y(0+)=X0H(∞)=−X0
y(∞)=X0H(0)=0
τ=kb
با استفاده از فرم عمومی پاسخ پله واحد در یک سیستم مرتبه اول، داریم:
y(t)=y(∞)+(y(0+)−y(∞))e−τt
=0+(−X0−0)e−(bk)t
=−X0e−(bk)t
همچنین میتوان از روش زیر استفاده کرد و به پاسخ مشابهی دست یافت.
طول دمپر با اعمال نیروی محدود به صورت آنی تغییر نمیکند، بنابراین X(0+)=−X0 است. موقعیت نهایی مستقل از دمپر است؛ زیرا در سرعت صفر، هیچ نیروی اصطکاکی وجود ندارد و X(∞)=0 است. ثابت زمانی در سیستم دمپر و فنر برابر با kb است. بنابراین:
y(t)=−X0e−(bk)t
مثال ۳
در مدار زیر، اگر ولتاژ ورودی ein(t) برابر با پله واحد باشد، آنگاه مقدار eout(t) را بیابید.
مدار مثال ۳
حل اول
ابتدا باید تابع انتقال مدار را به دست آوریم. میدانیم که مدار مربوط به یک مقسم ولتاژ با دو مقاومت است. بنابراین میتوان شماتیک مدار را به صورت زیر رسم کرد.
مدار معادل مثال ۳
تابع انتقال برابر است با:
Ein(S)Eout(S)=H(S)=Z2+Z1Z2
در این تابع انتقال، Z1 برابر با R1 و Z2 برابر با ترکیب سری R2 و خازنC است. بنابراین داریم:
برای به دست آوردن پاسخ پله واحد سیستم، تابع انتقال سیستم را در تبدیل لاپلاس تابع پله واحد S1 ضرب میکنیم و سپس با استفاده از تبدیل لاپلاس معکوس، پاسخ را به دست میآوریم:
با در نظر گرفتن مقادیر R1=R2=1KΩ و C=1μF نتیجه زیر برای سیستم به دست میآید.
پاسخ پله مدار مثال ۳
حل دوم (بدون تبدیل لاپلاس معکوس)
با استفاده از تابع انتقال میتوان به اطلاعات زیر دست یافت:
eout(0+)=H(∞)=(R2+R1)R2
eout(∞)=H(0)=1
τ=C(R2+R1)
با استفاده از فرم عمومی پاسخ پله یک سیستم مرتبه اول میتوان نوشت:
eout(t)=eout(∞)+(eout(0+−eout(∞))e−τt
=1+((R2+R1)R2−1)e−C(R2+R1)t
=1−(R2+R1)R1e−C(R2+R1)t
همان طور که دیدیم این راه حل بسیار سادهتر است. همچنین، با استفاده از روش زیر به پاسخ مشابهی خواهیم رسید.
در t=0+، هیچ ولتاژی در دو سر خازن وجود ندارد. بنابراین مدار یک مقسم ولتاژ ساده است که در آن C.Req(∞)=C(R1+R2) است. بنابراین نتیجهای که در این حالت به دست میآوریم نیز مانند حالت قبل است:
eout(t)=eout(∞)+(eout(0+)−eout(∞))e−τt
=1+((R2+R1)R2−1)e−C(R2+R1)t
=1−(R2+R1)R1e−C(R2+R1)t
پاسخ پله سیستم مرتبه دو
همان طور که انتظار میرود، پاسخ پله یک سیستم مرتبه دو، پیچیدهتر از پاسخ پله یک سیستم مرتبه اول است. در حالی که پاسخ پله یک سیستم مرتبه اول را میتوان با استفاده از ثابت زمانی (تعیین از روی قطبهای سیستم)، مقدار اولیه و مقدار نهایی سیستم به صورت کامل تعریف کرد، پاسخ پله یک سیستم مرتبه دو در حالت کلی با روشهای پیچیدهتری محاسبه میشود.
در ابتدا باید توجه کنید که فرم تابع تبدیل یک سیستم مرتبه دو را میتوان به صورت زیر نوشت:
X(s)Y(s)=H(s)=s2+ds+eas2+bs+c
در رابطه فوق، a و b و c و d و e همگی اعداد حقیقی هستند و حداقل یکی از اعداد در صورت کسر باید غیر صفر باشد.
پاسخ پله سیستم پایین گذر مرتبه دو
در واقع امکان پذیر نیست که تاثیر هر کدام از این 5 عدد را در تابع انتقال عمومی تفکیک کرد. بنابراین برای سادگی، در این مرحله فرض میکنیم a=b=0 باشند. پس تابع انتقال سیستم را به صورت زیر بازنویسی میکنیم:
H(s)=s2+ds+ec=Ks2+2ζω0s+ω02ω02
سه مقدار در رابطه بالا وجود دارند که عبارتند از:
$$ \eqalign {\omega _0} $$ فرکانس نوسان (Natural (or Resonant) Frequency) یا فرکانس طبیعی بر حسب rad/sec.
ζ=2ed: نرخ میرایی (Damping Ration) (بدون واحد).
K=ec:بهره (Gain) سیستم که دارای واحد یکسان با y/x است.
انتخاب این ثابتها ممکن است به صورت تصادفی به نظر برسد، اما در ادامه نشان خواهیم داد که با انتخاب مناسب این ثابتها میتوان محاسبات ریاضی را برای سیستم مرتبه دوم سادهتر کرد. هر سه ثابت ذکر شده در بالا دارای تعبیر فیزیکی هستند که منجر به داشتن دید صحیح به سیستم میشوند. این سیستم را سیستم مرتبه دوم پایین گذر میگویند؛ زیرا پاسخ فرکانسی یک سیستم پایین گذر است.
برای یافتن پاسخ پله واحد سیستم، ابتدا تابع انتقال را در تبدیل لاپلاس تابع پله واحد، یعنی s1 ضرب میکنیم. بنابراین داریم:
Yγ(s)=s1H(s)=s1Ks2+2ζω0s+ω02ω02
قبل از اینکه yγ(t) را به دست آوریم، ابتدا باید ریشههای عبارت موجود در مخرج کسر بالا را به دست آوریم:
s=2−2ζω0±(2ζω0)2−4ω02=−ζω0±ω0ζ2−1
مقدار ζ، منجر به ایجاد ۵ نوع مختلف از سیستمها میشود که در جدول زیر آورده شدهاند:
مقدار نهایی زمانی که t→∞ میل کند، برابر با K یا بهره سیستم خواهد شد. این مقدار همچنین با H(0) برابر است.
مقدار اولیه زمانی که t→0+ میل کند، برابر با صفر خواهد بود. این مقدار همچنین با H(∞) برابر است.
در فرمول بالا، هر کجا که ω0 حضور داشته باشد، حتما در t ضرب شده است. این بدین معنی است که هر وقت ω0 را دو برابر کنیم، سرعت سیستم دو برابر میشود، اما شکل پاسخ را تغییر نمیدهد، بلکه صرفا آن را در حوزه زمان بسط میدهد یا منقبض میکند.
زمانی که ζ→∞ میل کند، عبارت دوم در صورت کسر فوق، به سمت صفر میل میکند و سیستم مانند یک سیستم مرتبه اول رفتار میکند.
تاثیر ζ و ω0 روی شکل پاسخ بعدا مورد بحث قرار میگیرند.
حالت ۲: سیستم میرای بحرانی (ζ=1)
برای به دست آوردن پاسخ پله واحد یک سیستم میرای بحرانی، روندی همانند سیستم تندمیرا را طی میکنیم. برای ζ=1، ریشههای مخرج کسر تابع انتقال سیستم، هر دو در S=−ω0 قرار دارند. همچنین محل ریشهها را با S=−α نیز نمایش میدهند. بنابراین میتوان تابع انتقال سیستم را به صورت زیر بازنویسی کرد:
در مورد این پاسخ نیز میتوان چند مشخصه بسیار مهم را به خاطر سپرد:
مقدار نهایی هنگامی که t→∞ میل کند، برابر با K خواهد شد که همان بهره سیستم است. این مقدار همچنین با H(0) برابر است.
مقدار اولیه سیستم هنگامی که t→0+ میل کند، برابر با صفر خواهد شد که با H(∞) برابر است.
در معادله بالا، هر گاه که ω0 حضور داشته باشد، حتما در t ضرب میشود. این بدین معنی است که اگر ω0 را دو برابر کنیم، آنگاه سرعت سیستم نیز دو برابر میشود، اما شکل پاسخ تغییر نمیکند.
با دور شدن قطبها از مبدا یا به عبارت دیگر با افزایش α، سرعت سیستم نیز افزایش مییابد.
حالت ۳: سیستم کندمیرا (ζ<1)
برای سیستمهای کندمیرا، از تابع انتقال استفاده میکنیم تا پاسخ پله را در حوزه فرکانس یا حوزه لاپلاس به دست آوریم. محل قطبها را میتوان یا بر حسب ω0 و ζ و یا بر حسب مقادیر حقیقی و موهومی آنها (α و ωd) نوشت.
H(s)=Ks2+2ω0s+ω02ω02=K(s+α)2+ωd2α2+ωd2
محل قطبها در این سیستم را میتوان در دیاگرام قطب زیر مشاهده کرد.
دیاگرام قطبهای سیستم کندمیرا
توجه کنید که −α برابر با قسمت حقیقی قطب و ±jωd برابر با قسمت موهومی قطب است. همچنین میتوان گفت که ω0 برابر با فاصله قطب از مبدا است و زاویه بین محور افقی و قطب را میتوان از روی ζ و با استفاده از فرمول θ=cos−1(ζ) به دست آورد. میتوان این چهار مولفه را به صورت زیر به یکدیگر ربط داد:
مقدار نهایی در t→∞، برابر با K است که همان بهره سیستم محسوب میشود. همچنین این مقدار با H(0) برابر است.
مقدار ابتدایی هنگامی که t→0+ میل کند، برابر با صفر است. این مقدار با H(∞) برابر است.
در معادله بالا، هر گاه که ω0 حضور داشته باشد، حتما در t ضرب میشود. این بدین معنی است که اگر ω0 را دو برابر کنیم، آنگاه سرعت سیستم نیز دو برابر میشود، اما شکل پاسخ تغییر نمیکند. با افزایش مقدار ω0، سیستم سریعتر میشود و قطبها از مبدا دور میشوند.
مقدار کاهشی e−ζω0t دارای یک ضریب میرایی α=ζω0 است. به عبارت دیگر، میتوان گفت که ثابت زمانی برابر با τ=ζω01 به دست میآید.
فرکانس نوسان ωd را فرکانس میرایی (Damped Frequency) نیز میگویند که برابر است با ωd=ω01−ζ2.
بحث راجع به تاثیر ζ و ω0 روی شکل پاسخ پله نیز بسیار مهم است که بعدا مورد بررسی قرار میگیرد.
حالت ۴: سیستم نامیرا (ζ=0)
زمانی که ضریب میرایی برابر با صفر باشد، اصطلاحا سیستم را نامیرا میگویند. ریشههای مخرج تابع انتقال برابر با S=±Jω هستند، بنابراین تابع انتقال در حوزه لاپلاس برابر است با:
H(s)=Ks2+ω02ω02=K(s+jω0)(s−jω0)ω02
بر اساس تابع فوق و تبدیل لاپلاس معکوس، پاسخ پله در حوزه زمان به صورت زیر نوشته میشود:
yγ(t)=K(1−sin(ω0t+π))=K(1−cos(ω0t))
همان طور که از نام این سیستم مشخص است، سیستم نامیرا هیچ میرایی یا نوسانی ندارد. در تصویر زیر نمایی از دیاگرام قطبهای سیستم نامیرا نشان داده شده است.
دیاگرام قطبهای سیستم نامیرا
حالت ۵: رشد نمایی (ζ<0)
اگر حالتی را در نظر بگیریم که ζ<0 باشد، میتوانیم تابع انتقال را بر حسب دو ریشه مخرج کسر آن بنویسیم:
H(s)=Ks2+2ζω0s+ω02ω02=K(s+α1)(s+α2)α1⋅α2
α1=−ζω0+ω0ζ2−1=ω0(−ζ+ζ2−1)
α2=−ζω0−ω0ζ2−1=ω0(−ζ−ζ2−1)
میتوانیم پاسخ پله واحد را با ضرب کردن تابع انتقال H(s) در تبدیل لاپلاس پله واحد (S1) به دست آورد. فعلا فرض میکنیم که α1 و α2 با هم برابر نباشند:
Yγ(s)=s1H(s)=s1K(s+α1)(s+α2)α1⋅α2
=sA1+s+α1A2+s+α2A3
yγ(t)=A1+A2e−α1t+A3e−α2t
توجه کنید که مقادیر A1 و A2 و A3 را در عبارات بالا محاسبه نکردهایم، اما تعیین مقادیر دقیق آنها در مقدار عبارت اهمیت زیادی ندارد؛ زیرا سیستم به صورت نمایی رشد میکند. چون قسمت حقیقی α1 و α2 اعداد منفی هستند، عبارت بالا با گذر زمان به صورت نمایی افزایش مییابد. همچنین به دلیل اینکه α1 و α2 اعداد مختلط هستند، عبارت بالا با گذر زمان نوسانی میشود. این رفتار در سیستمها معمولا نادر است، اما در تئوری کنترل (Control Theory) چنین سیستمهایی از اهمیت بالایی برخوردار هستند. در تصویر زیر نمایی از دیاگرام قطبهای یک سیستم ناپایدار یا رشد نمایی نشان داده شده است.
دیاگرام قطبهای یک سیستم ناپایدار یا رشد نمایی
تاثیر بهره و ζ و ω0 روی پاسخ پله پایین گذر سیستم درجه دوم
تابع انتقال سیستم پایین گذر درجه دوم را میتوان توسط عبارت زیر نمایش داد:
HLP(s)=H0,LPs2+2ζω0s+ω02ω02
دیاگرام قطبهای سیستم درجه دو پایین گذر در شکل زیر مشاهده میشود.
دیاگرام قطبهای سیستم درجه دو پایین گذر
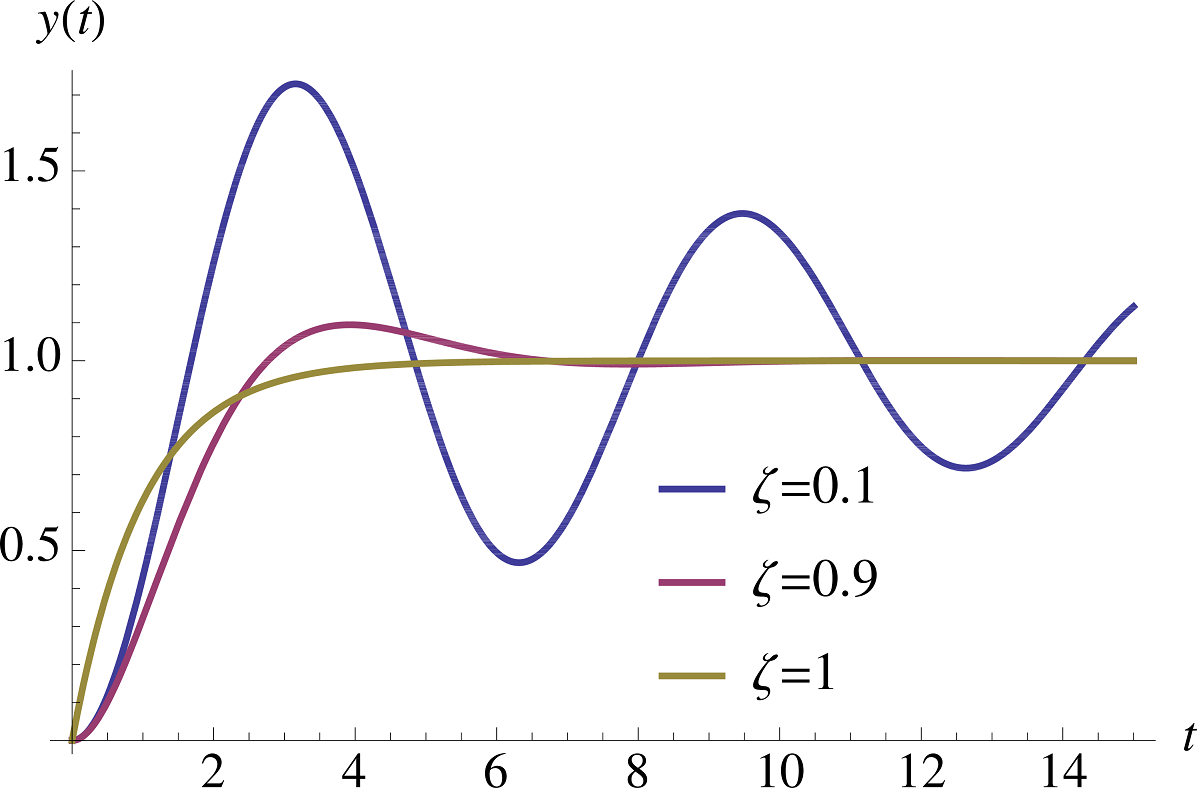
نمودار شکل زیر، تاثیر ζ را روی پاسخ پله واحد یک سیستم درجه دو با مقادیر مثبت ζ و H0,LP=1 نمایش میدهد. برای ζ>1، سیستم تندمیرا خواهد شد و نوسان نمیکند. همچنین سیستم به ازای ζ=1 نیز نوسان نخواهد کرد. اما به ازای ζ<1، سیستم کندمیرا شده و هر چه به ζ→0 نزدیکتر شود، بیشتر و بیشتر نوسان میکند.
ζ را روی پاسخ پله واحد یک سیستم درجه دو با مقادیر مثبت ζ و H0,LP=1" width="480" height="297">تاثیر ζ را روی پاسخ پله واحد یک سیستم درجه دو با مقادیر مثبت ζ و H0,LP=1
تصویر بالا تا زمانی که ζ>0 باشد، درست است. درباره این نمودار توجه به چند نکته بسیار مهم است:
توجه کنید که میرایی بحرانی (ζ=1) هیچ رفتار غیر قابل پیشبینی را در سیستم به وجود نمیآورد. در واقع این حالت فقط از لحاظ ریاضی بسیار خاص است، اما روی رفتار فیزیکی سیستم تاثیری نخواهد گذاشت.
اگر H0,LP=1 باشد، پاسخ سیستم متناسب با آن مقیاس میشود. به عبارت دیگر، اگر H0,LP دو برابر شود، دامنه پاسخ نیز دو برابر میشود.
مقدار اولیه (t=0+) را میتوان از طریق H(∞) به دست آورد، بنابراین yY(0+)=0 خواهد شد.
مقدار نهایی (t→∞) را میتوان از روی H(0) و برابر با yY(∞)=1 به دست آورد.
تصویر زیر تاثیر ω0 را روی پاسخ پله واحد یک سیستم درجه دوم نشان میدهد.
ω0 روی پاسخ پله واحد یک سیستم درجه دوم" width="480" height="297">تاثیر ω0 روی پاسخ پله واحد یک سیستم درجه دوم
همان طور که از روی تصویر مشخص است، شکل پاسخ سیستم با تغییر ω0 ثابت باقی میماند. اما سرعت سیستم تغییر میکند. البته به این نکته باید توجه کنید که دامنه پیکهای اول، دوم، سوم و ... با یکدیگر برابر و از ω0 مستقل است و تنها با زمان تغییر میکند. هنگامی که ω0 افزایش مییابد، سرعت سیستم نیز افزایش مییابد. اگر ω0 دو برابر شود، سرعت سیستم نیز دو برابر میشود. اما باید به این نکته هم اشاره کرد که ω0 باعث ایجاد تغییر در شکل پاسخ نمیشود. زیرا ω0 و t همیشه با یکدیگر و به صورت جفت ω0.t ظاهر میشوند. بنابراین افزایش ω0 باعث افزایش حاصل ضرب ω0.t در هر لحظه از زمان نیز میشود.
تصویر زیر نیز نشان دهنده تاثیر ζ روی پاسخ پله واحد سیستم درجه دوم به ازای مقادیر مثبت و منفی ζ است.
ζ روی پاسخ پله واحد سیستم درجه دوم به ازای مقادیر مثبت و منفی ζ" width="600" height="371" />تاثیر ζ روی پاسخ پله واحد سیستم درجه دوم به ازای مقادیر مثبت و منفی ζ
برای مقادیر مثبت ζ، پاسخ با زمان کاهش مییابد. به ازای ζ=0 سیستم هیچ میرایی نخواهد داشت و اصطلاحا سیستم نامیرا است. به ازای مقادیر منفی ζ پاسخ با گذر زمان رشد خواهد کرد. در عمل ما زیاد با این سیستمها برخورد نخواهیم کرد. اما در برخی موقعیتهای خاص، این اتفاق برای سیستم رخ میدهد که به انرژی سیستم همواره افزوده میشود. توجه کنید که مقدار نهایی سیستم زمانی که ζ≤0 باشد، تعریف نمیشود.
پاسخ پله سیستم مرتبه دو بالا گذر (Highpass)
سیستم مرتبه دو بالا گذر با معادله زیر توصیف میشود:
HHP(s)=H0,HPs2+2ζω0s+ω02s2
این سیستم دارای بسیاری از مشخصههای مشابه با سیستم مرتبه دوم پایین گذر است، اما تفاوتهایی نیز دارد. در تصویر زیر محل قطبها در یک سیستم مرتبه دوم بالا گذر نشان داده شده است.
محل قطبها در یک سیستم مرتبه دوم بالا گذر
در تصویر زیر نیز پاسخ پله یک سیستم مرتبه دوم بالا گذر نشان داده شده است.
پاسخ پله یک سیستم مرتبه دوم بالا گذر
شباهتهای سیستمهای مرتبه دوم بالا گذر و پایین گذر عبارتند از:
زمانی که ζ کاهش یابد، از نوسانی بودن سیستم کاسته میشود.
هنگامی که ω0 افزایش یابد، سیستم سریعتر میشود.
اگر H0,HP=1 باشد، پاسخ متناسب با آن مقیاس میشود. اگر H0,HP دو برابر شود، دامنه پاسخ دو برابر میشود.
اما این دو سیستم با یکدیگر در موارد زیر متفاوت هستند:
مقدار اولیه در t=0+ بر اساس H(∞) به دست میآید، اما اکنون yY(0+)=H(∞)=1 است.
مقدار نهایی در t→∞ هنوز بر اساس H(0) تعیین میشود، اما اکنون yY(∞)=H(0)=0 است. این مورد روی دیاگرام قطب و صفر با یک صفر در مبدا نشان داده میشود.
پاسخ پله سیستم مرتبه دوم میان گذر (Bandpass)
سیستم مرتبه دوم میان گذر نیز دارای بسیار مشخصههای مشابه با سیستم مرتبه دو پایین گذر و بالا گذر است. البته تفاوتهایی نیز با این دو سیستم دارد. این سیستم را میتوان به صورت زیر نمایش داد:
HBP(s)=H0,BPs2+2ζω0s+ω022ζω0s
محل قطبها در یک سیستم مرتبه دو میان گذر در تصویر زیر نشان داده شده است.
محل قطبها در یک سیستم مرتبه دو میان گذر
شباهتهای این سیستم با دو سیستم مرتبه دو بالا گذر و پایین گذر عبارت است از:
هنگامی که ζ کاهش مییابد، سیستم کمتر میرا و بیشتر نوسانی میشود.
هنگامی که ω0 افزایش مییابد، سیستم سریعتر میشود.
اگر H0,BP=1 باشد، پاسخ سیستم متناسب با آن مقیاس میشود. به عبارت دیگر، اگر H0,BP دو برابر شود، دامنه پاسخ دو برابر میشود.
اما سیستم مرتبه دو میان گذر با دو سیستم بالا گذر و پایین گذر در موارد زیر تفاوت دارد:
مقدار اولیه t=0+ هنوز بر اساس H(∞) محاسبه میشود، اما این بار yY(0+)=H(∞)=0 است.
مقدار نهایی در t→∞ هنوز هم بر اساس H(0) محاسبه میشود، اما اکنون yY(∞)=0 است. این مورد روی نمودار صفر و قطب با صفر در مبدا نشان داده شده است.
HBP(S=jω0)=H0,BP در ω=ω0 برقرار است.
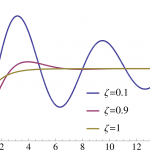
پاسخ پله در متلب
در برنامه متلب زیر، تاثیر ضریب میرایی روی پاسخ پله یک سیستم مرتبه دوم نشان داده شده است.
«مرضیه آقایی» دانشآموخته مهندسی برق است. فعالیتهای کاری و پژوهشی او در زمینه کنترل پیشبین موتورهای الکتریکی بوده و در حال حاضر، آموزشهای مهندسی برق مجله فرادرس را مینویسد.
شما در حال مطالعه نسخه آفلاین یکی از مطالب «مجله فرادرس» هستید. لطفاً توجه داشته باشید، ممکن است برخی از قابلیتهای تعاملی مطالب، مانند امکان پاسخ به پرسشهای چهار گزینهای و مشاهده جواب صحیح آنها، نمایش نتیجه آزمونها، پاسخ تشریحی سوالات، پخش فایلهای صوتی و تصویری و غیره، در این نسخه در دسترس نباشند. برای دسترسی به نسخه آنلاین مطلب، استفاده از کلیه امکانات آن و داشتن تجربه کاربری بهتر اینجا کلیک کنید.






















 را روی پاسخ پله واحد یک سیستم درجه دو با مقادیر مثبت و " width="480" height="297">
را روی پاسخ پله واحد یک سیستم درجه دو با مقادیر مثبت و " width="480" height="297"> روی پاسخ پله واحد یک سیستم درجه دوم" width="480" height="297">
روی پاسخ پله واحد یک سیستم درجه دوم" width="480" height="297"> روی پاسخ پله واحد سیستم درجه دوم به ازای مقادیر مثبت و منفی " width="600" height="371" />
روی پاسخ پله واحد سیستم درجه دوم به ازای مقادیر مثبت و منفی " width="600" height="371" />

















