شما در حال مطالعه نسخه آفلاین یکی از مطالب «مجله فرادرس» هستید. لطفاً توجه داشته باشید، ممکن است برخی از قابلیتهای تعاملی مطالب، مانند امکان پاسخ به پرسشهای چهار گزینهای و مشاهده جواب صحیح آنها، نمایش نتیجه آزمونها، پاسخ تشریحی سوالات، پخش فایلهای صوتی و تصویری و غیره، در این نسخه در دسترس نباشند. برای دسترسی به نسخه آنلاین مطلب، استفاده از کلیه امکانات آن و داشتن تجربه کاربری بهتر اینجا کلیک کنید.
پاسخ سیستم مرتبه دوم – از صفر تا صد (+ دانلود فیلم آموزش رایگان)
۲۶۰۷۳
۱۴۰۲/۰۲/۱۸
۸۶ دقیقه
PDF
آموزش متنی جامع
آموزش ویدئویی
در ادامه مجموعه آموزشهای سیستمهای کنترل در مجله فرادرس، در این آموزش پاسخ سیستم مرتبه دوم را بررسی میکنیم. همچنین با اثر افزودن صفر و قطب بر سیستم آشنا خواهیم شد.
قبلاً با نمایش توابع تبدیل در سیستمهای کنترل آشنا شدیم. دیدیم که توابع تبدیل قطبهای حقیقی یا مختلط دارند. شکل کلی تابع تبدیل یک سیستم مرتبه دوم به صورت زیر بیان میشود:
H(s)=s2+2ζωns+ωn2ωn2,
که در آن:
ζ>0 و ωn>0 پارامترهایی در R>0 هستند.
مخرج تابع تبدیل، یک چندجملهای یکین (Monic) است. پارامتر ζ، میرایی یا ضریب میرایی، و ωn فرکانس طبیعی نامیده میشوند.
بهره DC تابع تبدیل H(s) (اگر وجود داشته باشد) برابر با 1 است.
ریشههای معادله درجه دوم مخرج تابع تبدیل، به صورت زیر هستند:
s=−ζωn±ωnζ2−1=−ωn(ζ±ζ2−1).
همانطور که میبینیم، با تغییر ζ، طبیعت قطبها نیز تغییر خواهد کرد:
اگر ζ>1، هر دو قطب حقیقی و منفی هستند.
اگر ζ=1، دو قطب تکراری منفی وجود دارد.
اگر ζ<1، با دو قطب مختلط s=−σ±jωd مواجه خواهیم بود که بخش حقیقی آن منفی است و تساویهای σ=ζωn و ωd=ωn1−ζ2 را داریم.
سه حالت بالا، به ترتیب، تُندمیرا (Overdamped)، میرای بحرانی (Critically Damped) و کُندمیرا (Underdamped) نامیده میشوند. اگر ζ=0 باشد، میرایی در سیستم نخواهد بود (ωd=ωn).
تابع تبدیل سیستم کُندمیرای زیر را در نظر بگیرید:
$$ \large \begin {align*}<br />
H ( s ) & = \frac { \omega ^ 2 _ n } { s ^ 2 + 2 \zeta \omega _ n s + \omega ^ 2 _ n } , \mbox { } \, \, \, \, \, \, \, \, \zeta < 1 .<br />
\end{align*} $$
قطبهای این سیستم، به صورت زیر هستند:
s=−ζωn±jωn1−ζ2=−σ±jωd
شکل ۱: محل قطبهای سیستم مرتبه دوم کُندمیرا
اگر مجذور قسمتهای حقیقی و موهومی قطبها را با هم جمع کنیم، به معادله یک دایره خواهیم رسید:
Re2+Im2=ωn2(ζ2+(1−ζ2)2)=ωn2.
در شکل ۱، رابطه cosφ=ωnζωn=ζ نیز برقرار است.
پاسخ ضربه سیستم به صورت زیر قابل محاسبه است:
\begin{align*} \large
h(t) & = \mathscr { L } ^ { - 1 } \{ H ( s ) \} \hspace{5.5cm} \\
& = \mathscr { L } ^ { - 1 } \left\{ \frac { \omega ^ 2 _ n } { s ^ 2 + 2 \zeta \omega _ n s + \omega ^ 2 _ n } \right\} \\
& = \mathscr { L } ^{ - 1 } \left\{ \frac { \omega ^ 2 _ n } { ( s + \sigma ) ^ 2 + \omega ^ 2 _ d } \right\} \hspace{3cm} \\
& = \mathscr { L } ^ { - 1 } \left\{ \frac { ( \omega ^ 2 _ n /\omega _ d ) \omega _ d } { ( s + \sigma ) ^ 2 + \omega ^ 2 _ d } \right\} \\
& = \frac { \omega ^ 2 _ n } { \omega _ d } e ^ { -\sigma t } \sin ( \omega _ d t ) . \hspace {4.5cm}
\end{align*}
به طور مشابه، میتوان پاسخ پله را به صورت زیر محاسبه کرد:
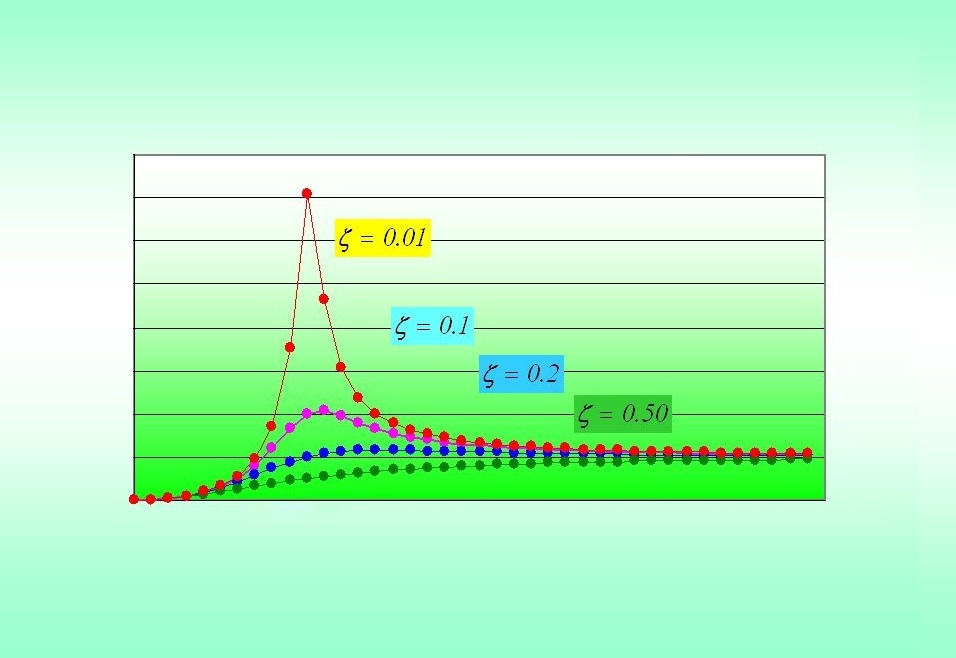
نمودار پاسخ پله سیستم مرتبه دوم کُندمیرا، برای مقادیر مختلف ζ در شکل زیر نشان داده شده است.
شکل ۲: پاسخ پله یک سیستم مرتبه دوم کُندمیرا به ازای مقادیر مختلف ζ
با توجه به شکل بالا، نرخ میرایی نمایی پاسخ پله، به بخش حقیقی قطبهای مختلط ℜ(s)=−σ=−ζωn بستگی دارد؛ در حالی که بخش موهومی، نوسانی بودن پاسخ را نشان میدهد. به همین دلیل است که ωd=ωn1−ζ2 فرکانس طبیعی میرا نامیده میشود.
همانطور که گفتیم، پاسخ پله تابع تبدیل سیستم مرتبه دوم کُندمیرایِ
H(s)=s2+2ζωns+ωn2ωn2=(s+σ)2+ωd2ωn2
به صورت زیر است:
y(t)=1−e−σt(cos(ωdt)+ωdσsin(ωdt))
که در آن، σ=ζωn و ωd=ωn1−ζ2 فرکانس طبیعی میرا است.
در ادامه، خواهیم دید که ضریب میرایی ζ و فرکانس طبیعی ωn ویژگیهای مهمی از بخش گذرای پاسخ پله را تعیین میکنند.
مشخصات پاسخ سیستم در حالت گذرا
در این بخش، برخی ویژگیهای مهم پاسخ گذرا را بیان میکنیم.
زمان صعود (Rise Time) را به عنوان مدت زمانی تعریف میکنیم که طول میکشد تا پاسخ سیستم از 10% به 90% مقدار حالت ماندگار (پاسخ پله) برسد. زمان صعود را با tr نشان میدهند. شکل زیر، زمان صعود پاسخ پله یک سیستم مرتبه اول را نشان میدهد.
شکل ۳: زمان صعود یک سیستم مرتبه اول
زمان صعود tr پاسخ پله y(t)=1(t)−e−at را میتوان به صورت تحلیلی و با استفاده از تعریف به دست آورد. فرض میکنیم t0.1 و t0.9، لحظاتی هستند که در پاسخ در آنها، به ترتیب، به 10% و 90% مقدار حالت ماندگار میرسد (برای نخستین بار). در نتیجه، زمان صعود به صورت زیر به دست میآید:
اکنون به سیستم مرتبه دوم بر میگردیم. مجدداً سیستم مرتبه دوم کُندمیرای زیر را در نظر بگیرید:
H(s)=s2+2ζωns+ωn2ωn2=(s+σ)2+ωd2ωn2,
که در آن، σ=ζωn و ωd=ωn1−ζ2 هستند و ζ<1 است.
پاسخ پله y(t)=1−e−σt(cos(ωdt)+ωdσsin(ωdt)) سیستم در شکل ۴ نشان داده شده است.
شکل ۴: پاسخ یک سیستم مرتبه دوم (کُندمیرا)
علاوه بر زمان صعود، دو ویژگی فراجهش (Overshoot) و زمان نشست (Settling Time) را نیز میتوان بررسی کرد:
زمان صعود tr: مدت زمانی که 0.1y(∞) به 0.9y(∞) میرسد.
فراجهش Mp و زمان پیک tp (Mp بر حسب درصد فراجهش نیز بیان میشود).
زمان نشست ts: نخستین باری است که پاسخ گذرا به محدوده مشخص کوچکی از y(∞) میرسد و در آن محدوده باقی میماند. معمولاً محدوده 5% پاسخ حالت ماندگار را برای زمان نشست در نظر میگیریم. گفتنی است که مقدار پیشفرض برای محدوده تغییرات در تابع stepinfo() نرمافزار متلب، 2% است.
در حالت کلی، وضعیت مطلوب برای پاسخی با صعود و نشست سریع و فراجهش کم، باید شرایط زیر را داشته باشد:
tr کوچک
Mp کوچک
tp کوچک
ts کوچک
اما در عمل، برآورده کردن همه شرایط فوق، ناممکن است، زیرا مثلاً کاهش tr به افزایش Mp منجر میشود.
فرمولهای مشخصات پاسخ در حوزه زمان
در این بخش، فرمولهای مربوط به مشخصات پاسخ گذرا را بیان میکنیم.
در حالت کلی، محاسبه زمان صعود tr به صورت تحلیلی کار دشواری است؛ اما با نرمال کردن مقیاس زمان به صورت t→ωnt، میتوان به صورت تجربی مقدار تقریبی زمان صعود را به دست آورد:
wntr≈1.8.( ζ=0.5)
بنابراین، میتوانیم از tr≈ωn1.8 استفاده کنیم که تقریب مناسبی برای ζ≈0.5 است.
فراجهش و زمان پیک
در شکل ۴، زمان پیک tp اولین لحظه t>0 است که در آن، y′(t)=0 برقرار است. پاسخ و مشتق آن به صورت زیر هستند:
زمان نشست، آخرین لحظهای است که پاسخ پله به محدوده نوار خطای 5% وارد میشود و از آن خارج نمیشود. بنابراین، میتوان نوشت:
ts=min{t>0:y(∞)∣y(t′)−y(∞)∣≤0.05 for all t′≥t}.
در شکل قبل، y(∞)=1 است. بنابراین، نوار خطا را میتوان به صورت زیر نوشت:
∣y(t)−1∣=e−σtcos(ωdt)+ωdσsin(ωdt),
که در آن، نمایی کاهشی e−σt همان جملهای است که باید به آن توجه کنیم، زیرا توابع sin و cos به 1 محدود هستند. بنابراین، e−σts≤0.05 منجر به رابطه ts=−σln0.05≈σ3 خواهد شد.
به عنوان جمعبندی، برای مشخصات حوزه زمان یک سیستم مرتبه دوم کُندمیرایِ
با استفاده از فرمولهایی که در بخش قبل برای یک سیستم مرتبه دوم کندمیرا گفته شد، میتوان مشخصات حوزه زمان را با مکان قطبها در صفحه مختلط نشان داد.
زمان صعود
فرض کنید میخواهیم رابطه tr≤c برقرار باشد، که در آن، c کران بالای مطلوب برای زمان صعود است. در نتیجه، داریم:
tr⟹ωn≈ωn1.8≤c≥c1.8.
اگر رابطه بالا را به صورت هندسی بیان کنیم، قطبها باید در ناحیه سایه زده شده شکل زیر قرار داشته باشند.
tr≤c" width="295" height="277">شکل ۵: موقعیتهای ممکن قطبها برای ناحیه tr≤c
فراجهش
فرض کنید میخواهیم Mp≤c باشد:
Mp=exp(−1−ζ2πζ)≤c
به ضریب میرایی بزرگی نیاز داریم. طبق آنچه قبلاً گفتیم، میتوان نوشت:
1−ζ2ζ=ωn1−ζ2ωnζ=ωdσ=cotφ,
بنابراین، φ باید کوچک باشد. اگر رابطه بالا را به صورت هندسی بیان کنیم، قطبها باید در ناحیه سایه زده شده شکل زیر قرار داشته باشند.
Mp≤c" width="272" height="255">شکل ۶: موقعیتهای ممکن قطبها برای ناحیه Mp≤c
زمان نشست
فرض کنید میخواهیم ts≤c باشد. بنابراین، داریم:
ts⟹≈σ3≤cσ≥c3.
در نتیجه، اندازه بخش حقیقی قطبها (Re(s)=−σ) باید به اندازه کافی بزرگ باشد؛ یعنی به اندازه کافی از مبدأ دور باشد.
اگر رابطه بالا را به صورت هندسی بیان کنیم، قطبها باید در ناحیه سایه زده شده شکل زیر قرار داشته باشند.
ts≤c" width="272" height="255">شکل ۷: موقعیتهای ممکن قطبها برای ناحیه ts≤c
هرچه اندازه قطبهای سمت چپ محور موهومی بزرگتر باشند، پاسخ سریعتر و در نتیجه ts کوچکتر است.
اگر قیود و الزاماتی که داریم، ترکیبی از ویژگیهای tr، Mp و ts باشد، میتوانیم به سادگی آنها را بر صفحه مختلط اعمال کرده و اشتراک آنها را به عنوان محدوده مجاز برای انتخاب قطبها تعیین کنیم. شکل زیر این موضوع را نشان میدهد.
tr، Mp و ts" width="348" height="327">شکل ۸: موقعیتهای ممکن برای قطبها با اعمال قیود tr، Mp و ts
اثر صفر و قطب بر پاسخ گذرا
در این بخش، اثر افزودن صفرها و قطبها را بر شکل پاسخ گذرا بررسی میکنیم.
فرض کنید تابع تبدیل سیستم، به صورت زیر باشد:
H(s)=p(s)q(s)
صفرهای این سیستم، ریشههای چندجملهای صورت q(s)=0 هستند.
این حالت را در قالب یک مثال توضیح میدهیم. تابع تبدیل H1(s) را با فرکانس طبیعی نرمالشده ωn=1rad/s در نظر بگیرید:
H1(s)=s2+2ζs+11,ωn=1.
فرض میکنیم صفر جدید s=−a ( a>0) به H1(s) اضافه شود. برای آنکه بهره DC برابر با 1 باقی بماند، جمله ثابت صورت را به شکل نرمال as+1 در نظر میگیریم. تابع تبدیل جديد H2(s) به صورت زیر خواهد بود:
از معادله اخیر میتوان دریافت که اضافه کردن صفر s=−a به تابع تبدیل اصلی، پاسخ جدید y2(t) را نتیجه خواهد داد که برابر با مجموع پاسخ اصلی y1(t) و ضریبی از مشتق y˙1(t) آن است.
y2(t)=y1(t)+a1y˙1(t)
s=−a روی پاسخ پله H1(s)" width="458" height="299">شکل ۹: اثر افزودن صفر سمت راست s=−a روی پاسخ پله H1(s)
طبق شکل بالا، صفر سمت راست، سبب موارد زیر میشود:
افزایش فراجهش (به عنوان اثر اصلی)؛
کمی تغییر در زمان نشست؛
و هرچه صفر از مبدأ دورتر باشد؛ یعنی a→∞، اثر آن کمتر خواهد بود؛ زیرا a1y˙1(t)→0.
اثر صفر سمت راست
مشابه بخش قبل، میتوانیم اثر صفر سمت راست s=a (a>0) را بر پاسخ سیستم بررسی کنیم. نتیجه افزودن صفر سمت راست به سیستم، به صورت زیر است:
از معادله بالا میتوان دریافت که اضافه کردن صفر s=a به تابع تبدیل اصلی، پاسخ جدید y2(t) را نتیجه خواهد داد که برابر با حاصل تفریق ضریبی از مشتق y˙1(t) از پاسخ اصلی y1(t) است.
s=a روی پاسخ پله H1(s)" width="460" height="292">شکل ۱۰: اثر افزودن صفر سمت راست s=a روی پاسخ پله H1(s)
طبق شکل بالا، میتوان گفت که افزودن یک صفر سمت راست بر سیستم، سبب موارد زیر میشود:
کند شدن یا تأخیر در پاسخ اصلی؛
ایجاد فروجهش بزرگ، در صورت بسیار نزدیک بودن صفر به مبدأ.
اثر قطب سمت چپ
یک سیستم مرتبه n عمومی، دارای n قطب (مختلط) است، زیرا طبق قضیه اساسی جبر، معادله چندجملهای p(s)=0، دقیقاً n ریشه در مجموعه اعداد مختلط دارد. همچنین، میتوان گفت:
اگر بخش حقیقی قطبهای سمت چپ حداقل 5 برابر از بخش حقیقی قطبهای غالب سمت چپ بزرگتر باشد، تأثیر زیادی نخواهند داشت. مثلاً اگر برای قطبهای غالب، Re(s)=−2 را داشته باشیم و بخش حقیقی قطبهای اضافه، Re(s)=−10 باشد، تأثیر آنها در حوطه زمان، به ترتیب، e−2t و e−10t خواهد بود و با توجه به e−10t≪e−2t، تأثیر قطبهای اضافه، قابل توجه نخواهد بود.
5 برابر تنها یک قرارداد است؛ اما واقعاً میتوان اثر قطبهای نزدیکتر را مشاهده کرد.
شکل ۱۱: قطبهای غالب
اثر قطب سمت راست
بررسی اثر قطبهای سمت راست بر سیستم توجیهی ندارد، زیرا این قطبها ناپایدارند.
اثر قطبهای روی محور موهومی
وضعیتی که قطبها روی محور موهومی قرار دارند، یک حالت مرزی است. برای بررسی این مورد، ابتدا فرض کنید یک قطب در مبدأ داریم:
H(s)=s1
آیا این سیستم پایدار است؟
پاسخ ضربه، برابر با Y(s)=s1⟹y(t)=1(t) و یک تابع واحد و در نتیجه، پایدار است.
پاسخ پله برابر با Y(s)=s21⟹y(t)=t,t≥0 است. خروجی آن، یک شیب واحد است و افزایشی است.
اکنون حالتی را در نظر بگیرید که سیستم دو قطب موهومی دارد:
H(s)=s2+ω2ω2.
پاسخ ضربه، برابر با Y(s)=s2+ω2ω2⟹y(t)=ωsin(ωt) و خروجی محدود است، اما همگرا نمیشود.
پاسخ پله برابر با Y(s)=s(s2+ω2)ω2⟹y(t)=1−cos(ωt) است و خروجی محدود است، اما همگرا نمیشود.
بنابراین، سیستمهایی با قطب روی محور موهومی، اکیداً پایدار نیستند. برای درک بهتر اثر قطب بر سیستم، شکل زیر را ببینید.
H(s)" width="408" height="372">شکل ۱۲: اثر قطبها روی پاسخ پله H(s)
به طور خلاصه میتوان گفت:
پاسخ سیستم برای قطبهایی که بخش حقیقی آنها در سمت چپ محور موهومی است (Re(s)<0)، پایدار است.
پاسخ سیستم برای قطبهایی که بخش حقیقی آنها در سمت راست محور موهومی است (Re(s)>0)، ناپایدار است.
پاسخ سیستم برای قطبهایی که روی محور موهومی قرار دارند(Re(s)=0)، اکیداً پایدار نیست.
اگر این مطلب برای شما مفید بوده است، آموزشهای زیر نیز به شما پیشنهاد میشوند:
سید سراج حمیدی دانشآموخته مهندسی برق است و به ریاضیات و زبان و ادبیات فارسی علاقه دارد. او آموزشهای مهندسی برق، ریاضیات و ادبیات مجله فرادرس را مینویسد.
۳ دیدگاه برای «پاسخ سیستم مرتبه دوم – از صفر تا صد (+ دانلود فیلم آموزش رایگان)»
حمید
سلام . بسیار عالی بود ممنون. فقط من یه سوال داشتم که نتونستم جوابم رو پیدا کنم . چطور میشه از روی شکل پاسخ به ورودی مثلا پله ی یه سیستم . مقادیر امگا ان و زیتا رو بدست اورد؟ مثلا فرمول ماکزیمم فرا جهش رو چطور باز نویسی کنم که بتونم با داشتن فراجهش تنها . زتا رو حساب کنم؟
امید زندی
اگر تابع تبدیل استاندارد مرتبه دوم در یک عدد ثابت ضرب بشود فرمولهای اورشوت، زمان نشست، زمان صعود، زمان پیک هیچ تغییری نمیکنند. این مشخصهها فقط به محل قطبهای تابع تبدیل وابسته هستند و به بهره ثابت آن وابسته نیستند.
پس از روی مخرج تابع تبدیل غیراستاندارد زیتا و امگا ان را استخراج و سپس مشخصهها را محاسبه کنید.
احمد
سلام ببخشید یه سوال داشتم که هر چی جست جو کردم به نتیجه خاصی نرسیدم تمام حالاتی که بررسی شد برای این بود که سیستم مرتبه دو استاندارد باشه اما به یه سوال برخوردم که به نظر استاندارد نمیومد و از ما ضریب میرایی فرکانس طبیعی میرا و نامیرا اورشوت و زمان نشستو میخواست این تحت شرایطی بود که صورت تابع تبدیل 120بود و مخرج s^2+5*s+100 . فرکانس نامیرا اینجا با هم برابر نیس میشه راهنمایی کنید چطور این مسئله حل میشه با تشکر
شما در حال مطالعه نسخه آفلاین یکی از مطالب «مجله فرادرس» هستید. لطفاً توجه داشته باشید، ممکن است برخی از قابلیتهای تعاملی مطالب، مانند امکان پاسخ به پرسشهای چهار گزینهای و مشاهده جواب صحیح آنها، نمایش نتیجه آزمونها، پاسخ تشریحی سوالات، پخش فایلهای صوتی و تصویری و غیره، در این نسخه در دسترس نباشند. برای دسترسی به نسخه آنلاین مطلب، استفاده از کلیه امکانات آن و داشتن تجربه کاربری بهتر اینجا کلیک کنید.










 " width="295" height="277">
" width="295" height="277"> " width="272" height="255">
" width="272" height="255"> " width="272" height="255">
" width="272" height="255"> ، و " width="348" height="327">
، و " width="348" height="327"> روی پاسخ پله " width="458" height="299">
روی پاسخ پله " width="458" height="299"> روی پاسخ پله " width="460" height="292">
روی پاسخ پله " width="460" height="292">
 " width="408" height="372">
" width="408" height="372">










سلام . بسیار عالی بود ممنون. فقط من یه سوال داشتم که نتونستم جوابم رو پیدا کنم . چطور میشه از روی شکل پاسخ به ورودی مثلا پله ی یه سیستم . مقادیر امگا ان و زیتا رو بدست اورد؟ مثلا فرمول ماکزیمم فرا جهش رو چطور باز نویسی کنم که بتونم با داشتن فراجهش تنها . زتا رو حساب کنم؟
اگر تابع تبدیل استاندارد مرتبه دوم در یک عدد ثابت ضرب بشود فرمولهای اورشوت، زمان نشست، زمان صعود، زمان پیک هیچ تغییری نمیکنند. این مشخصهها فقط به محل قطبهای تابع تبدیل وابسته هستند و به بهره ثابت آن وابسته نیستند.
پس از روی مخرج تابع تبدیل غیراستاندارد زیتا و امگا ان را استخراج و سپس مشخصهها را محاسبه کنید.
سلام ببخشید یه سوال داشتم که هر چی جست جو کردم به نتیجه خاصی نرسیدم تمام حالاتی که بررسی شد برای این بود که سیستم مرتبه دو استاندارد باشه اما به یه سوال برخوردم که به نظر استاندارد نمیومد و از ما ضریب میرایی فرکانس طبیعی میرا و نامیرا اورشوت و زمان نشستو میخواست این تحت شرایطی بود که صورت تابع تبدیل 120بود و مخرج s^2+5*s+100 . فرکانس نامیرا اینجا با هم برابر نیس میشه راهنمایی کنید چطور این مسئله حل میشه با تشکر