



سنسور موقعیت – از صفر تا صد
سنسور موقعیت (Position Sensor) را مانند سایر انواع سنسورها، در گروه ادوات ورودی طبقهبندی میکنند. همان طور که از نام آنها مشخص است، سنسورهای موقعیت مکان اشیا را تشخیص میدهند، به این معنی که برای یک نقطه ثابت به عنوان مرجع عمل میکنند. این نوع از سنسورها میتوانند فیدبکی از موقعیت را فراهم کنند. در این مطلب میخواهیم با انواع مختلف سنسورهای موقعیت آشنا شویم و اصول کاری آنها را بررسی کنیم.


یک روش اولیه برای تعیین موقعیت این است که از معیار فاصله استفاده کنیم. مقدار فاصله میتواند بر اساس مسافت بین دو نقطه (مانند مسافت پیموده شده از یک نقطه ثابت تا یک نقطه دیگر) و یا بر حسب مقدار چرخش (حرکت زاویهای) تعیین شود. به عنوان مثال، میتوان از گردش چرخهای ربات برای تعیین مسافت پیموده شده در سطح زمین استفاده کرد. در هر دو حالت ذکر شده، سنسور موقعیت میتواند حرکت اشیا در یک خط راست را با سنسورهای خطی (Linear Sensor) سنجیده و حرکت زاویهای (Angular Movement) آنها را با سنسورهای چرخشی (Rotational Sensors) اندازه بگیرد.
پتانسیومتر به عنوان سنسور موقعیت
پتانسیومتر را میتوان یکی از پرکاربردترین انواع سنسورهای موقعیت دانست؛ زیرا این المان قیمت بسیار پایین و نیز کاربرد بسیار سادهای دارد. پتانسیومتر دارای یک اتصال لغزان با یک شفت مکانیکی است که میتواند حرکت زاویهای (چرخشی) و یا خطی (در نوع لغزنده) داشته باشد. در پتانسیومتر، مقاومت بین تیغه لغزان و مسیر مقاومتی در اثر حرکت تغییر میکند و میتواند یک سیگنال الکتریکی خروجی را تولید کند.
در یک پتانسیومتر، رابطه نسبی بین محل قرارگیری تیغه لغزان بر روی مسیر مقاومتی و مقدار مقاومت وجود دارد که سیگنال خروجی هم به صورت متناسب با این مقادیر تغییر میکند. به عبارت دیگر میتوان گفت که مقاومت در یک پتانسیومتر متناسب با موقعیت است. در تصویر زیر نمایی از یک پتانسیومتر را میتوان مشاهده کرد.

پتانسیومترها در بازه وسیعی از اندازه و نیز طراحیهای مختلف تولید میشوند. متداولترین نوع پتانسیومترها، نوع گرد و چرخشی است، اما انواع مسطح با لغزنده خطی نیز موجود هستند. زمانی که از پتانسیومترها به عنوان سنسور موقعیت استفاده شود، جسم متحرک را مستقیما به شفت گردان یا لغزنده پتانسیومتر متصل میکنیم. اعمال یک ولتاژ مرجع DC به دو پایه ثابت خارجی پتانسیومتر، سبب ایجاد یک المان مقاومتی میشود. سیگنال ولتاژ خروجی، از ترمینال اتصال لغزان گرفته میشود. تصویر زیر نمایی از ساختار داخلی در یک پتانسیومتر را نشان میدهد.

این پیکربندی سبب ایجاد یک مدار از نوع مقسم ولتاژ میشود که متناسب با موقعیت شفت خروجی عمل میکند. بنابراین اگر به عنوان مثال، یک ولتاژ ۱۰ ولت را به المان مقاومتی پتانسیومتر اعمال کنیم، آنگاه بیشینه ولتاژ خروجی برابر با ولتاژ تغذیه 10 ولت و کمینه ولتاژ خروجی برابر با ۰ ولت خواهد بود. پس تیغه لغزان پتانسیومتر میتواند سیگنال خروجی را از ۰ تا ۱۰ ولت تغییر دهد و بر همین اساس مقدار خروجی ۵ ولت نشان میدهد که تیغه لغزان در موقعیت وسط یا مرکزی قرار گرفته است.
سیگنال خروجی در پتانسیومتر از اتصال تیغه لغزان مرکزی در حال حرکت بر روی مسیر مقاومتی دریافت میشود و با موقعیت زاویهای شفت پتانسیومتر متناسب است. در مدار شکل زیر، نمونهای از یک مدار ساده اندازهگیری موقعیت را میتوان مشاهده کرد.

اگر چه مدارات اندازهگیری موقعیت با استفاده از پتانسیومتر، دارای مزایای زیادی مانند قیمت پایین، تکنولوژی ساده و کاربرد راحت هستند، اما این مدارات معایبی مانند دقت پایین، پاسخ فرکانسی محدود، تکرارپذیری پایین و خوردگی در اثر وجود قطعات متحرک نیز دارند. البته استفاده از پتانسیومتر به عنوان سنسور موقعیت یک عیب بزرگتر نیز دارد. بازه حرکت تیغه لغزان در این ادوات و در نتیجه سیگنال خروجی به دست آمده، بر حسب اندازه پتانسیومتر مورد استفاده، دارای محدودیت است.
به عنوان مثال، یک پتانسیومتر چرخشی تک دور (Single Turn) معمولا دارای چرخش مکانیکی ثابت، بین ۰ درجه تا ماکزیمم ۲۴۰ یا ۳۳۰ درجه است. البته نوع چند-دور (Multi-Turn) پتانسیومترها دارای بیشینه چرخش مکانیکی ۳۶۰۰ درجه (10*360) هستند. اکثر انواع پتانسیومترها، از فیلم کربن برای مسیر مقاومتی خود استفاده میکنند. اما عیب این نوع از پتانسیومترها در نویز بالا و طول عمر مکانیکی پایین این ادوات است.
برای کاربردهای با دقت بالا و نویز پایین این امکان وجود دارد که از المان مقاومتی با پلاستیک رسانا نوع فیلم پلیمری یا سرامیکی استفاده کرد. این نوع از ادوات دارای مسیر مقاومتی خطی الکتریکی نرم با اصطکاک پایین هستند و به همین دلیل این ویژگی را دارند که نویز بسیار کمی را تولید میکنند و همچنین طول عمر مکانیکی بالاتری دارند. این ادوات مقاومتی هم دارای دو نوع تک دور و چند دور هستند. کاربرد متداول برای این نوع از سنسورهای موقعیت دقت بالا، در دستههای بازی کامپیوتری، چرخهای فرمان، رباتها و کاربردهای صنعتی است.
سنسور موقعیت القایی
سنسورهای موقعیت نوع القایی، نوعی دیگر از سنسورهای موقعیت هستند.

ترانسفورمر تفاضلی متغیر خطی
نوعی از سنسور موقعیت که فاقد مشکل خوردگی مکانیکی و در نتیجه نویز و اصطکاک بالا است، ترانسفورمر تفاضلی متغیر خطی (Linear Variable Differential Transformer) و یا به اختصار LVDT است. این ادوات در واقع سنسورهای موقعیت نوع القایی هستند که اصول کاری بسیار شبیه به ترانسفورمرهای جریان متناوب یا AC دارند و برای اندازهگیری موقعیت مورد استفاده قرار میگیرند. این نوع از سنسورهای موقعیت دارای عملکرد بسیار دقیقی برای اندازهگیری جابهجایی خطی هستند. خروجی سنسورهای LVDT با موقعیت هسته متحرک در آنها متناسب است.
ترانسفورمر تفاضلی متغیر خطی از سه سیمپیچ در یک قالب لولهای توخالی تشکیل شده است. یکی از سیمپیچها، سیمپیچ اولیه نام دارد و دو سیمپیچ دیگر نیز سیمپیچهای ثانویه مشابهی را تشکیل میدهند که با هم سری هستند و ۱۸۰ درجه الکتریکی با سیمپیچ اولیه اختلاف فاز دارند.
یک هسته فرومغناطیس آهنی نرم که گاهی آرمیچر نیز گفته میشود، به شی مورد اندازهگیری متصل میشود و درون لوله توخالی LVDT به سمت بالا و پایین میلغزد یا حرکت میکند. یک ولتاژ مرجع AC کوچک که سیگنال تحریک نام دارد، به سیمپیچ اولیه اعمال میشود. سیگنال ولتاژ مقداری در حدود ۲ تا ۲۰ ولت rms و فرکانس ۲ تا ۲۰ هرتز دارد. اعمال سیگنال تحریک باعث میشود یک سیگنال EMF در دو سیمپیچ ثانویه مجاور القا شود.
اگر هسته مغناطیس از جنس آهن نرم، دقیقا در وسط لوله توخالی LVDT قرار داشته باشد، آنگاه EMFهای القایی در دو سیمپیچ ثانویه همدیگر را خنثی میکنند؛ زیرا این دو مقدار با یکدیگر ۱۸۰ درجه اختلاف فاز دارند. بنابراین، ولتاژ حاصل در خروجی برابر با صفر ولت میشود. این نقطه را موقعیت خنثی (Null Position) یا صفر ترانسفورمر میگویند. در اثر حرکت هسته آهنی از نقطه خنثی به دو سمت دیگر در لوله خالی، ولتاژ القایی تولید شده در یکی از دو سیمپیچ ثانویه بزرگتر از ولتاژ القایی در سیمپیچ ثانویه دیگر خواهد شد و در نتیجه ولتاژ در خروجی ایجاد میشود.
پلاریته سیگنال ولتاژ خروجی به جهت و نیز جابهجایی هسته متحرک بستگی دارد. هر چه مقدار جابهجایی هسته آهنی از نقطه صفر خنثی بزرگتر باشد، سیگنال ولتاژ بزرگتری در خروجی تولید میشود. در نتیجه این مدار قادر است یک ولتاژ تفاضلی در خروجی تولید کند که به صورت خطی با موقعیت هسته تغییر میکند. سیگنال خروجی از این نوع سنسور موقعیت دارای هم دامنه و هم پلاریته است. همان طور که گفتیم، دامنه این سیگنال یک تابع خطی از جابهجایی هسته در سنسور حرکتی است، اما پلاریته سیگنال نشاندهنده جهت جابهجایی در نظر گرفته میشود. در تصویر زیر نمایی از ساختار داخلی یک ترانسفورمر تفاضلی متغیر خطی به همراه خروجی آن را میتوان مشاهده کرد.

فاز سیگنال خروجی را میتوان با فاز تحریک سیمپیچ اولیه مقایسه کرد و یک مدار الکترونیکی مناسب مانند تقویتکننده سنسور AD592 LVDT را فراهم آورد و با این روش تشخیص داد که هسته آهنی در کدام نیمه از مسیر حرکت قرار دارد. مزیت چنین مداری در این است که جهت حرکت به سادگی به دست میآید.
زمانی که آرمیچر از یک سمت لوله به موقعیت خنثی و سپس به سمت دیگر حرکت میکند، ولتاژ ابتدا از بیشینه به صفر میرود و سپس دوباره به مقدار بیشینه باز میگردد، اما در طول این فرایند فاز خود را نیز ۱۸۰ درجه عوض میکند. این ویژگی، LVDT را قادر میسازد که یک سیگنال ولتاژ AC در خروجی تولید کند که دامنه این ولتاژ مقدار جابهجایی را نشان میدهد و زاویه فاز آن هم نشاندهنده جهت حرکت شی متصل به سنسور است.
یک کاربرد متداول سنسور ترانسفورمر تفاضلی متغیر خطی به عنوان ترانسدیوسر فشار است. در یک ترانسدیوسر فشار، فشار مورد اندازهگیری به یک دیافراگم وارد میشود تا نیرویی را تولید کند. سپس این نیرو توسط سنسور به یک سیگنال ولتاژ تبدیل میشود که قابل خوانده شدن است.
مزایای سنسور ترانسفورمر تفاضلی متغیر خطی یا LVDT نسبت به پتانسیومترهای مقاومتی، در خطی بودن عملکرد LVDT است. به همین دلیل است که ولتاژ خروجی در اثر جابهجایی دارای دقت، رزولوشن و حساسیت بالایی است و عملکرد سنسور تقریبا بدون اصطکاک است. از این سنسورها همچنین میتوان در محیطهای سخت نیز استفاده کرد.
سنسور موقعیت مجاورتی القایی
سنسور موقعیت مجاورتی القایی (Inductive Proximity Sensors)، نوع دیگری از سنسور موقعیت القایی است که کاربرد زیادی دارد. این سنسور را سنسور جریان گردابی (Eddy Current Sensor) نیز میگویند.
سنسورهای موقعیت مجاورتی القایی در واقع برای اندازهگیری جابهجایی یا چرخش زاویهای مورد استفاده قرار نمیگیرند، بلکه به منظور تشخیص حضور اشیا در مقابل یا در مجاورت آنها به کار برده میشوند. نمایی از یک سنسور مجاورتی القایی در تصویر زیر دیده میشود.

سنسور موقعیت مجاورتی القایی را میتوان یک سنسور موقعیت غیر تماسی (Non-contact) دانست که از میدان مغناطیسی برای تشخیص اشیا استفاده کرده و نهایتا یک کلید را فعال میکند. در هر سنسور القایی، یک سیمپیچ حول یک هسته آهنی با میدان مغناطیسی پیچانیده میشود تا یک حلقه القایی تشکیل شود.
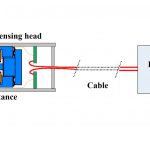
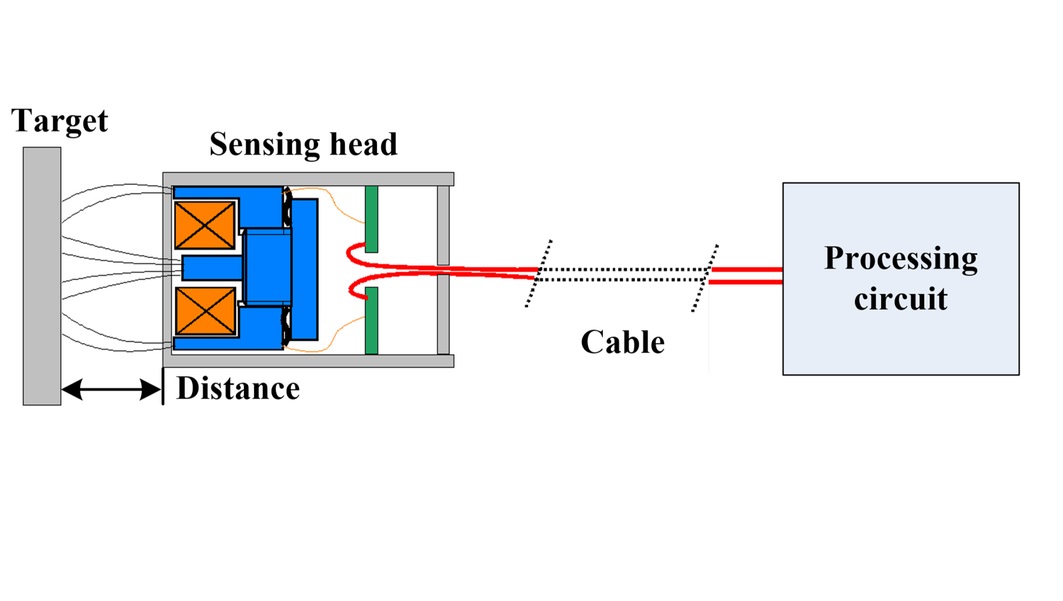
زمانی که یک ماده فرومغناطیسی، مانند یک صفحه آهنی فرومغناطیسی یا پیچ آهنی، در معرض میدان جریان گردابی قرار گیرد که در اطراف سنسور موقعیت القایی تشکیل میشود، آنگاه اندوکتانس سیمپیچ به صورت چشمگیری تغییر مییابد. مدار آشکارساز سنسورهای مجاورتی، این تغییرات را تشخیص میدهند و یک ولتاژ خروجی را تولید میکنند. بنابراین میتوان گفت سنسور موقعیت مجاورتی القایی بر اساس قانون القای فاردادی (Faraday’s Law of Inductance) عمل میکند. در تصویر زیر نمایی از ساختار یک سنسور مجاورتی القایی را میتوان مشاهده کرد.

یک سنسور موقعیت مجاورتی القایی چهار قسمت اصلی دارد. قسمت اول، اسیلاتور یا نوسانگر است که یک میدان الکترومغناطیسی تولید میکند. سایر اجزا این مدار سیمپیچ، مدار آشکارساز و مدار خروجی هستند. سیمپیچ در این سنسور برای تولید میدان مغناطیسی، مدار آشکارساز به منظور شناسایی تغییرات میدان به وجود آمده در هنگام حضور اشیا در برد سنسور و مدار خروجی با هدف تولید سیگنال نهایی خروجی با اتصال Normally Closed یا Normally Open به کار برده میشوند. اتصال Normally Closed را به اختصار با NC و اتصال Normally Open را با NO نمایش میدهند.
سنسورهای مجاورتی القایی قادر هستند که حضور اشیا آهنی در مقابل سر سنسور را بدون وجود ارتباط فیزیکی با شی مورد اندازهگیری، تشخیص دهند. این ویژگی، سنسورهای مجاورتی القایی را برای کار در محیطهای آلوده و مرطوب ایدهآل میسازد. بازه اندازهگیری سنسورهای مجاورتی القایی معمولا کوچک بوده و به صورت تقریبی از ۰٫۱ میلی متر تا ۱۲ میلی متر در نظر گرفته میشود.
علاوه بر کاربردهای صنعتی، سنسورهای مجاورتی القایی در کاربردهایی نظیر کنترل جریان ترافیک نیز مورد استفاده قرار میگیرند. در این کاربرد، با استفاده از سنسورهای مجاورتی القایی، چراغهای راهنمایی در تقاطعها و بزرگراهها تغییر وضعیت میدهند. زمانی که خودروها و سایر وسایل حمل و نقل از مقابل سنسورهای مجاورتی القایی عبور میکنند، بدنه فلزی خودرو باعث ایجاد تغییر در اندوکتانس سنسور القایی میشود و خروجی را در سنسور فعال میکند. بنابراین کنترل کننده چراغ راهنمایی از حضور خودروها آگاه میشود.
یکی از بزرگترین معایب این نوع از سنسورهای موقعیت، همه جهته (Omni-directional) بودن آنها است. به عبارت دیگر، این سنسورها میتوانند حضور یک شی فلزی را در بالا، پایین و یا طرفین خود تشخیص دهند. یکی دیگر از معایب سنسورهای مجاورتی القایی این است که نمیتوانند حضور اشیا غیرفلزی را در برابر خود آشکار کنند. البته سنسورهای مجاورتی خازنی (Capacitive Proximity Sensors) و سنسورهای مجاورتی مافوق صوت (Ultrasonic Proximity Sensors) نیز وجود دارند که میتوانند تا حدی بر برخی از این مشکلات غلبه کنند. از سایر انواع سنسورهای موقعیت مغناطیسی متداول میتوان به کلیدهای Reed، سنسورهای اثر هال و سنسورهای رلوکتانس متغیر اشاره کرد.
انکودرهای چرخشی
انکودرهای چرخشی (Rotary Encoders) نوع دیگری از سنسورهای موقعیت هستند و شبیه به پتانسیومترهایی عمل میکنند که در قسمت قبل مورد بررسی قرار گرفتند. اما این نوع از سنسورهای موقعیت، ادوات غیر تماسی و نوری محسوب میشوند که برای تبدیل موقعیت زاویهای یک شفت چرخان به کدهای آنالوگ یا دیجیتال مورد استفاده قرار میگیرند. به عبارت دیگر، این نوع از سنسورهای حرکتی قادر هستند که حرکت چرخشی مکانیکی را به سیگنالهای الکتریکی (ترجیحا دیجیتال) تبدیل کنند.

تمام انکودرهای نوری (Optical Encoders) بر اساس قاعده یکسانی عمل میکنند. نور منتشر شده توسط یک LED یا منبع نور مادون قرمز از یک دیسک کدگذاری شده چرخشی با رزولوشن بالا عبور میکند که حاوی الگوهای کدهای مورد نیاز است. این کدها میتوانند کدهای باینری، کدهای گری (Gray) یا کدهای BCD باشند. آشکارسازهای نوری دیسک را هنگام چرخش اسکن کرده و یک مدار الکترونیکی کدهای دریافتی را به فرم دیجیتال پردازش کرده و نهایتا یک رشته از پالسهای خروجی باینری تولید میکند. این پالسهای خروجی به یک کنترلکننده خارجی ارسال میشوند و کنترلکننده میتواند موقعیت زاویهای شفت موتور را تعیین کند.
انکودر موقعیت افزایشی
انکودر افزایشی (Incremental Encoder) را با عنوان انکودر تربیعی (Quadrature Encoder) یا انکودر گردان نسبی نیز میشناسند. این نوع از انکودرها سنسورهای موقعیت بسیار سادهای محسوب میشوند. خروجی این سنسورها یک دنباله از پالسهای مربعی است که توسط آرایشی از فتوسل به عنوان یک دیسک کدگذاری شده تولید میشود. سطح دیسک کدگذاری شده در واقع از ترکیب فضاهای شفاف و خطوط تیرهای تشکیل میشود که با فاصله معین از یکدیگر قرار گرفتهاند و به هر کدام از آنها سگمنت یا بخش گفته میشود. این صفحه دیسک در اطراف منبع نوری حرکت یا دوران میکند. انکودر قادر است که هنگام شمارش، رشتهای از پالسهای موج مربعی را ایجاد کند که این پالسهای تولیدی برای تشخیص موقعیت زاویهای شفت گردان روتور مورد استفاده قرار میگیرند. نمایی از دیسک در انکودر افزایش و سگمنتهای موجود روی آن را میتوان در تصویر زیر مشاهده کرد.

انکودرهای افزایشی دارای دو خروجی جداگانه هستند که به آنها خروجیهای تربیعی (Quadrature Outputs) گفته میشود. این دو خروجی با یکدیگر 90 درجه اختلاف فاز دارند. در واقع کاربرد اصلی خروجیهای تربیعی این است که جهت گردش شفت از روی آنها تعیین میشود. تعداد سگمنتهای شفاف و تیره موجود روی دیسک یا به عبارت دیگر تعداد شکافها در انکودر به عنوان عامل تعیین کننده رزولوشن سنسور در نظر گرفته میشود. با افزایش تعداد خطوط تیره در الگوی دیسک، رزولوشن انکودر بر حسب درجه در چرخش نیز افزایش مییابد. دیسکهای کدگذاری شده معمولی دارای رزولوشن بالاتر از ۲۵۶ پالس و یا ۸ بیت در هر چرخش هستند.
سادهترین انکودر افزایشی تاکومتر (Tachometer) نام دارد. این نوع انکودر دارای یک خروجی موج مربعی تکی میباشد و معمولا در کاربردهای تک جهته (Unidirectional) مورد استفاده قرار میگیرد که در آن فقط به اطلاعات ساده موقعیت یا سرعت نیاز است. انکودرهای تربیعی یا موج سینوسی در صنعت متداولترین نوع انکودر محسوب میشوند؛ زیرا این انکودرها دارای دو خروجی موج مربعی هستند که کانال A و کانال B نام دارند و قادرند جهت حرکت یا چرخش را نیز مشخص کنند. این نوع از انکودرها از دو آشکارساز نوری (Photo Detector) استفاده میکنند که ۹۰ درجه با یکدیگر اختلاف فاز دارند، بنابراین دو سیگنال خروجی سینوسی و کسینوسی تولید میکنند. نمایی از انکودر افزایشی و سیگنالهای خروجی از آن را میتوان در تصویر زیر مشاهده کرد.

با استفاده از تابع ریاضی آرک تانژانت میتوان زاویه شفت را بر حسب رادیان محاسبه کرد. معمولا دیسک نوری که در انکودرهای موقعیت چرخشی مورد استفاده قرار میگیرند، دارای شکل دایرهای هستند، بنابراین رزولوشن انکودر را میتوان با استفاده از به دست آورد که در آن n برابر با تعداد سگمنتهای موجود روی دیسک است.
به عنوان مثال، تعداد سگمنتهای مورد نیاز برای داشتن یک انکودر افزایشی با رزولوشن ۱ درجه با استفاده از محاسبه میشود. بنابراین تعداد پنجرهها برابر با به دست میآید. همچنین جهت چرخش را میتوان با استفاده از اینکه کدام یک از کانالها، کانال A یا کانال B، ابتدا خروجی را تولید میکنند، مشخص کرد. اگر A مقدم بر B باشد یا B مقدم بر A باشد، آنگاه دو جهت متفاوت برای چرخش وجود دارند. تصویر زیر نمایی از سیگنالهای خروجی در یک انکودر افزایشی هنگام چرخش شفت در دو جهت مختلف را نشان میدهد.

یکی از مهمترین معایب انکودرهای افزایشی هنگام استفاده به عنوان سنسور موقعیت، این است که برای تعیین زاویه مطلق شفت در یک چرخش خاص به شمارندهها (Counters) نیاز دارند. همچنین اگر تغذیه سنسور برای یک لحظه قطع شود و یا انکودر به دلیل کثیف بودن دیسک و یا نویز، یک پالس را از دست بدهد، اطلاعات زاویهای تولید شده توسط سنسور مقدار اشتباهی را نشان میدهد. یک راه برای غلبه بر این مشکلات، استفاده از انکودرهای موقعیت نوع مطلق (Absolute Position Encoders) است.
انکودر موقعیت مطلق
انکودرهای موقعیت مطلق دارای ساختار پیچیدهتری نسبت به انکودرهای افزایشی هستند. این نوع از انکودرها برای هر موقعیت چرخش یکتا، یک کد خروجی متمایز تولید میکنند که هم نشاندهنده موقعیت و هم تعیینکننده جهت چرخش است. دیسک کدگذاری شده در این انکودر، از چندین مسیر متمرکز از سگمنتهای تاریک و روشن تشکیل شده است.
هر مسیر با آشکارساز نوری خود مستقل است و میتواند به صورت آنی یک مقدار کدگذاری شده موقعیت را به ازای هر موقعیت زاویهای بخواند. تعداد مسیرهای روی دیسک متناظر با بیتهای رزولوشن باینری انکودر است. بنابراین، یک انکودر مطلق ۱۲ بیتی، دارای ۱۲ مسیر بر روی دیسک و در نتیجه ۱۲ مقدار کدگذاری شده است که هر کدام فقط یک بار در چرخش ظاهر میشوند. در تصویر زیر نمایی از یک دیسک کدگذاری شده باینری ۴ بیتی را میتوان مشاهده کرد.

یکی از مزیتهای اصلی انکودر مطلق، حافظه غیر فرار آن است که باعث میشود هنگام قطع تغذیه، موقعیت دقیق انکودر بدون نیاز به بازگشت به نقطه اولیه حفظ شود. اکثر انکودرهای چرخشی به عنوان ادوات تک دور (Single-Turn) در نظر گرفته میشوند، اما انکودرهای مطلق در انواع چند دور نیز موجود هستند که با استفاده از افزودن دیسک کدگذاری شده اضافی، از دورانها فیدبک به دست میآورند.
کاربرد متداول انکودرهای موقعیت مطلق در هارد درایو کامپیوترها و درایوهای CD یا DVD است که موقعیت مطلق هد خواندن و نوشتن مورد نیاز است. همچنین در پرینترها و دستگاههای ترسیمکننده مووقعیت دقیق هد ترسیمکننده بر روی کاغذ مورد نیاز است که با استفاده از انکودرهای مطلق میتوان به آن دست یافت.
اگر این مطلب برای شما مفید بوده است، آموزشهای زیر نیز به شما پیشنهاد میشوند:
- مجموعه آموزشهای مهندسی کنترل
- آموزش ابزار دقیق (Instrumentation)
- مجموعه آموزشهای مهندسی الکترونیک
- آموزش الکترونیک ۱
- فلومتر (Flowmeter) – از صفر تا صد
- سنسور فشار — از صفر تا صد
- سنسور فاصله سنج | عملکرد، انواع و مدار عملی — به زبان ساده
^^











ممنون ار مقالتون عالی بود
عالی
تشکر از زحمات شما