



فیدبک در الکترونیک – راهنمای جامع
فیدبک در الکترونیک و نیز در سیستمهای کنترل و اتوماسیون نقش بسیار مهمی در پایدار سازی مدارات مختلف ایفا میکند. در یک سیستم فیدبکی تمام یا قسمتی از سیگنال خروجی یا با علامت مثبت و یا منفی به سیستم باز گردانده میشود. در این مطلب قصد داریم به بیان مباحث مرتبط با فیدبک در مدارات الکترونیکی بپردازیم.


در سیستمهای فیدبک در الکترونیک معمولا لازم است که سیگنالها پردازش شوند، به همین دلیل میتوان گفت که قسمتی از سیستمهای فیدبکی در واقع پردازندههای سیگنال هستند. قسمت پردازش سیگنال در یک سیستم فیدبکی ممکن است الکترونیکی و یا الکتریکی باشد و بازه وسیعی، از مدارات ساده تا مدارات بسیار پیچیده را در بر گیرد. مدار کنترل فیدبکی آنالوگ ساده را میتوان با قطعات تکی و گسسته مانند ترانزیستورها، مقاومتها و خازنها پیادهسازی کرد و یا از مدارات مجتمع و مبتنی بر میکروپرسسور برای ایجاد سیستمهای فیدبک دیجیتال پیچیدهتر بهره برد.
مدارات حلقه باز به این صورت هستند که در آنها هیچ تلاشی برای جبران کردن (Compensate) تغییرات شرایط مدار و یا تغییرات شرایط بار انجام نمیگیرد. این تغییرات معمولا به دلیل تغییر در پارامترهای مدار مانند بهره (Gain)، پایداری (Stability)، دما، تغییرات ولتاژ منبع تغذیه و یا اغتشاشات خارجی (External Disturbances) به وجود میآیند. اما در واقع اثر این تغییرات را میتوان با استفاده از فیدبک (Feedback) در مدار حذف کرد و یا تا حد قابل توجهی کاهش داد.
یک سیستم فیدبک، سیستمی است که در آن از سیگنال خروجی نمونه برداری (Sampling) میشود. سپس مقدار نمونه برداری شده به ورودی باز گردانده میشود تا سیگنال خطایی برای هدایت سیستم را به وجود بیاورد. در حالت کلی در سیستمهای حلقه بسته (Closed-loop)، فیدبک از یک مدار زیر مجموعه تشکیل میشود. این مدار به تعدادی از سیگنالهای خروجی اجازه میدهد تا سیگنال ورودی را اصلاح کنند. این اصلاح در نهایت منجر به این امر میشود که پاسخ جدید با پاسخ حالت بدون فیدبک تفاوت قابل توجهی داشته باشد.
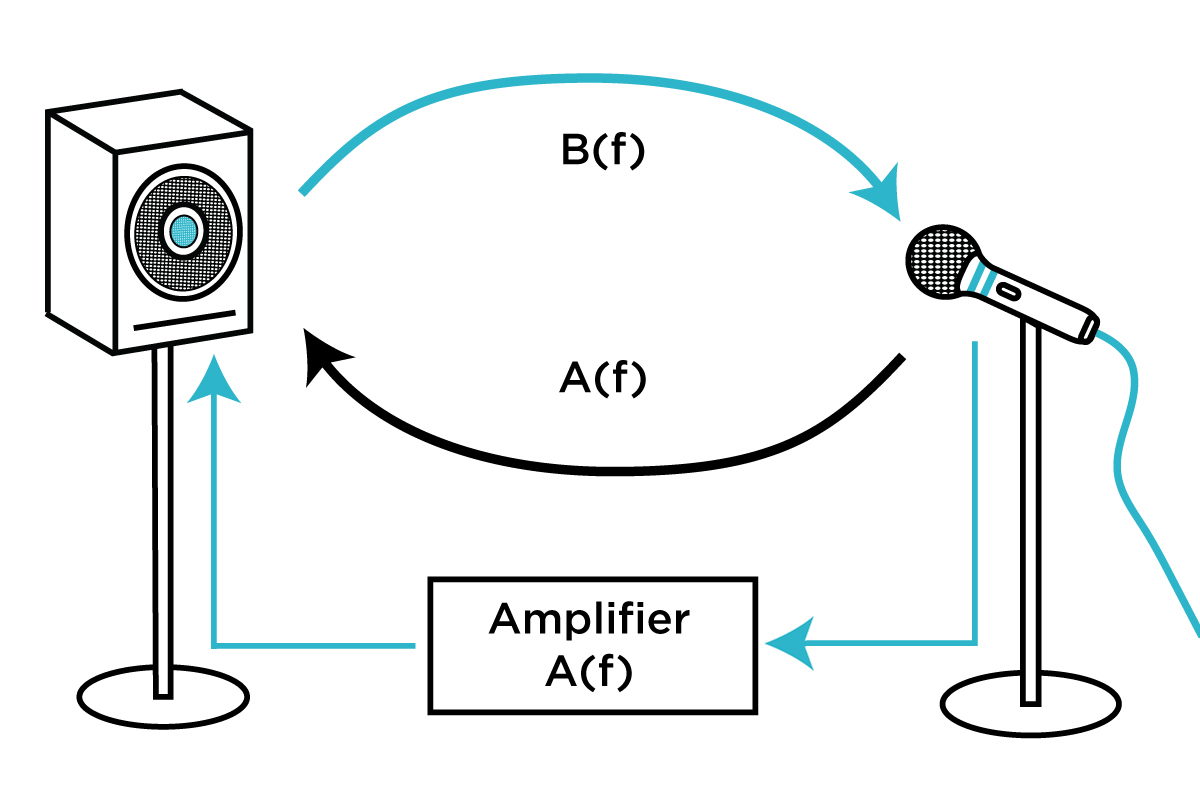
سیستمهای فیدبک در الکترونیک بسیار مفید هستند و در بازه بسیار وسیعی از کاربردها مانند مدارات تقویتکننده (Amplifier)، نوسانساز (Oscillator)، کنترل فرآیند (Process Control) و نیز بسیاری دیگر از مدارات الکترونیکی مورد استفاده قرار میگیرند. اما برای این که یک سیستم فیدبک ابزاری مفید واقع شود، باید کنترل شود؛ زیرا در صورت عدم کنترل کردن، سیستم دچار نوسان میشود و فاقد کارایی لازم خواهد بود. نمایی کلی از یک سیستم فیدبک در شکل زیر داده شده است.

این حلقه فیدبک ساده که از اندازهگیر، کنترلکننده و محرک تشکیل شده است، اجزای اساسی یک سیستم فیدبک را نشان میدهد. دلایل زیادی برای استفاده از یک حلقه فیدبک در الکترونیک وجود دارد که از مهمترین آنها میتوان به موارد زیر اشاره کرد:
- پارامترهای مدار مانند بهره سیستم و پاسخ آن را میتوان به صورت دقیق کنترل کرد.
- پارامترهای مدار را میتوان به صورت موثری از تغییر شرایط مدار مانند دما و یا تغییر ولتاژ منبع تغذیه مستقل کرد.
- اعوجاج سیگنالها که به دلیل طبیعت غیر خطی عناصر مدار به وجود میآیند، تا حد زیادی توسط فیدبک میتواند کاهش داده شود.
- پاسخ فرکانسی (Frequency Response)، پهنای باند (Bandwidth) و بهره مدار یا سیستم را میتوان به سادگی در محدودههای کوچکی کنترل کرد.
با وجود این که تنوع سیستمهای کنترل بسیار زیاد است، اما فقط دو نوع فیدبک وجود دارد: فیدبک مثبت (Positive Feedback) و فیدبک منفی (Negative Feedback). برای آشنایی بیشتر با فیدبک در الکترونیک میتوانید به مجموعه آموزش کنترل خطی درس، تمرین، حل مثال و تست فرادرس مراجعه کنید.
سیستمهای فیدبک مثبت
در یک سیستم کنترل فیدبک مثبت، نقطه تنظیم (Set Point) و سیگنال خروجی توسط کنترلکننده به یکدیگر اضافه میشوند، در نتیجه فیدبک هم فاز با ورودی است. تاثیر فیدبک مثبت و یا احیاکننده (Regenerative) افزایش بهره سیستم است. به عبارت دیگر در یک سیستم با فیدبک مثبت، بهره کلی بالاتر از حالتی است که به سیستم فیدبک اعمال نشده باشد. چنین مفهومی در روابط انسانی نیز صادق است، به این مفهوم که اگر از یک فرد تشویق به عمل آید، پر از انرژی میشود و بهره او در انجام یک کار بالاتر میرود.

اما در الکترونیک و سیستمهای کنترل، فیدبک مثبت میتواند منجر به افزایش بیش از حد بهره سیستم شود. در این حالت، جواب خروجی مدار نوسانی میشود؛ زیرا دامنه سیگنال ورودی موثر افزایش یافته است. نمونهای از مدارات فیدبک مثبت، تقویتکنندههای الکترونیکی مبتنی بر تقویتکننده عملیاتی و یا اپ امپ هستند. نمونهای از چنین فیدبکی در تصویر زیر نشان داده شده است.

کنترل فیدبک مثبت در یک اپ امپ از طریق اعمال بخش کوچکی از سیگنال ولتاژ خروجی () به پایه ورودی غیر معکوسکننده (+) و از طریق مقاومت فیدبک انجام میشود. اگر ولتاژ ورودی مثبت باشد، اپ امپ این سیگنال مثبت را تقویت میکند و خروجی سیگنالی مثبتتر خواهد بود. مقداری از این ولتاژ خروجی از طریق شبکه فیدبک به ورودی باز گردانده میشود. بنابراین مقدار ولتاژ ورودی مثبتتر میشود و همین امر سبب تولید خروجی مثبتتری میشود. این روند میتواند به همین ترتیب ادامه داشته باشد، اما به تدریج خروجی در حد مثبت بالای خود اشباع میشود. به طریق مشابه، اگر ولتاژ ورودی منفی باشد، روندی معکوس آنچه در بالا گفته شد، رخ میدهد و اپ امپ در سطح منفی خود به اشباع میرسد.
بنابراین میتوان دید، فیدبک مثبت به مدار اجازه نمیدهد به عنوان یک تقویتکننده عمل کند و سریعا ولتاژ خروجی اپ امپ را در یکی از سطوح مثبت یا منفی خود اشباع میکند؛ زیرا در فیدبک مثبت مقادیر ورودی مثبت، منجر به تولید خروجی مثبتتر میشوند و مقادیر ورودی منفی، مقادیر خروجی منفیتری را تولید خواهند کرد.
بنابراین اگر بهره حلقه برای سیستمی مثبت باشد، آنگاه تابع انتقال برابر با خواهد بود. توجه کنید که اگر GH=1 باشد، بهره برابر با بینهایت خواهد شد. در این حالت مدار به صورت خودکار شروع به نوسان خواهد کرد و برای ادامه این نوسان احتیاج به هیچ سیگنال ورودی ندارد. در نتیجه از این حالت میتوان برای ساخت نوسانسازها استفاده کرد.
اگرچه این رفتار مدار معمولا نامطلوب است، اما در الکترونیک میتواند برای به دست آوردن یک پاسخ کلیدزنی بسیار سریع برای یک شرایط یا سیگنال خاص مورد استفاده قرار گیرد. مثالی از کاربردهای فیدبک مثبت، ایجاد هیسترزیس (Hysteresis) در مدار است. در یک مدار هیسترزیس، خروجی یک حالت خاص را کسب کرده و آن حالت را تا عبور ورودی از سطح آستانه (Threshold) از پیش تعیینشده حفظ میکند. این رفتار را دو حالت پایدار داشتن (Bi-Stability) مینامند و معمولا در گیتهای منطقی و ادوات کلیدزنی دیجیتالی مانند مولتی ویبراتورها مورد استفاده قرار میگیرد.
در نتیجه، میتوان گفت فیدبک مثبت بهره مدار و نیز احتمال ناپایداری در سیستم را افزایش میدهد که ممکن است منجر به خود-نوسانی (Self-Oscillation) شود. دقیقا به همین دلیل است که فیدبک مثبت بیشتر در مدارات نوسانی مانند نوسانسازها و مدارات زمانبندی مورد استفاده قرار میگیرد.
فیدبک منفی
در یک سیستم کنترل فیدبک منفی، نقطه تنظیم و خروجی از یکدیگر کسر میشوند و به همین دلیل است که فیدبک دارای فاز مخالف با ورودی اصلی است. تاثیر فیدبک منفی یا فرسایشی (Degenerative) کاهش بهره مدار است. این پدیده همانند این است که اگر به یک فرد انتقاد شود، او ناراحت میشود و سطح انرژیاش کاهش مییابد.
به دلیل اینکه فیدبک منفی پاسخ پایداری را در مدار ایجاد میکند، در نتیجه پهنای باند عملکرد یک سیستم را افزایش میدهد و پایداری را بهبود میبخشد. اکثر سیستمهای کنترل از فیدبک منفی استفاده میکنند و اثر بهره را با استفاده از آن کاهش میدهند. مثالی از سیستم فیدبک منفی، در مدارات تقویتکننده الکترونیکی مبتنی بر تقویتکنندههای عملیاتی یا اپ امپ است. تصویری از این نوع تقویتکننده در شکل زیر دیده میشود.

کنترل فیدبک منفی در تقویتکننده از طریق اعمال بخش کوچکی از سیگنال ولتاژ خروجی () به پایه ورودی معکوسکننده (-) با استفاده از مقاومت فیدبک پیادهسازی میشود. اگر ولتاژ ورودی مثبت باشد، اپ امپ این سیگنال مثبت را تقویت میکند، اما چون به پایه معکوسکننده اپ امپ متصل است، در نتیجه خروجی منفیتر میشود. قسمتی از این ولتاژ خروجی از طریق شبکه مقاومت فیدبک به ورودی باز گردانده میشود.
بنابراین، ولتاژ ورودی از طریق سیگنال فیدبک منفی کاهش داده میشود و منجر به تولید خروجی کوچکتر میشود و این روال به همین ترتیب ادامه مییابد. به تدریج خروجی نشست (Settle Down) میکند و در یک مقدار خاص پایدار میشود. این مقدار توسط مشخص میشود.
به طریق مشابه، اگر ولتاژ ورودی منفی باشد، روالی معکوس آنچه در بالا گفته شد، اتفاق میافتد. در این حالت، ولتاژ خروجی تقویتکننده، سیگنالی مثبت (به دلیل اتصال به پایه معکوسکننده) میشود که به سیگنال منفی ورودی افزوده میشود. بنابراین، فیدبک منفی به تقویتکننده اجازه میدهد تا زمانی که خروجی در محدوده اشباع باشد، به عنوان یک تقویتکننده عمل کند.
میتوان مشاهده کرد که سیگنال ولتاژ خروجی توسط فیدبک منفی، پایدار و قابل کنترل میشود. دلیل این پایداری این است که در فیدبک منفی، مقدار ورودی بزرگتر منجر به تولید مقدار خروجی کوچکتر و مقدار ورودی کوچکتر منجر به تولید مقدار خروجی بزرگتر میشود.
بنابراین اگر سیستم دارای فیدبک منفی باشد، آنگاه تابع انتقال برابر با خواهد بود. کاربرد فیدبک منفی در تقویتکنندهها و سیستمهای کنترل فرآیند بسیار گستردهتر است؛ زیرا اساسا سیستمهای فیدبک منفی پایدارتر از سیستمهای فیدبک مثبت هستند. یک سیستم فیدبک منفی را زمانی پایدار میگویند که به جز شرایط مداری خاص، خود به خود در هر فرکانسی نوسان نکند.
مزیت دیگر این نوع فیدبک در این است که سیستمهای کنترل را در برابر تغییرات تصادفی در مقادیر المانها و ورودیها ایمن میسازد. البته این مزیت برای سیستم هزینههایی دارد. فیدبک منفی باید با احتیاط مورد استفاده قرار گیرد؛ زیرا به صورت جدی مشخصه عملکرد سیستم داده شده را دچار تغییر میکند.
طبقهبندی انواع سیستم فیدبک در الکترونیک
تا این قسمت، با نحوه بازخورد سیگنال خروجی به سیگنال ورودی آشنا شدیم. برای سیستمهای فیدبک این بازخورد میتواند یا مثبت و یا منفی باشد. اما روش انجام اندازهگیری سیگنال خروجی و معرفی این سیگنال به پورت ورودی مدار میتواند بسیار متنوع باشد و به همین دلیل سیستمهای فیدبک به چهار گروه اساسی طبقهبندی میشوند.
بر اساس اینکه آیا سیگنال ورودی تقویت شده است یا خیر و شرایط مطلوب خروجی به چه صورت است، متغیرهای ورودی و خروجی میتوانند یا به صورت جریان و یا ولتاژ مدلسازی شوند. بنابراین چهار طبقهبندی وجود دارد که در آنها یک سیستم فیدبک تک حلقهای سیگنال خروجی را به سیگنال ورودی باز میخوراند. این پیکربندیها به صورت زیر هستند:
پیکربندی سری-موازی (Series-Shunt Configuration)، پیکربندی موازی-موازی (Shunt-Shunt Configuration)، پیکربندی سری-سری (Series-Series Configuration)، پیکربندی موازی-سری (Shunt-Series Configuration).
نامگذاری این آرایشها از نحوه اتصال شبکه فیدبک بین طبقات ورودی و خروجی بر گرفته شده است.
سیستم فیدبک سری-موازی
فیدبک سری-موازی با نام فیدبک ولتاژ سری نیز شناخته میشود و به عنوان یک سیستم فیدبک کنترلشده ولتاژ-ولتاژ عمل میکند. ولتاژ خطا که از طریق شبکه مقاومت فیدبک باز خورانده میشود، با ورودی سری است. ولتاژی که از خروجی باز خورانده میشود نسبتی از ولتاژ خروجی است؛ زیرا با آن موازی (یا شنت) است. نمایی از این پیکربندی در تصویر زیر نشان داده شده است.

برای ارتباطات سری-موازی، پیکربندی از ولتاژ خروجی به ولتاژ ورودی تعریف شده است. اکثر مدارات تقویتکننده عملیاتی معکوسکننده و غیر معکوسکننده، با پیکربندی فیدبک سری-موازی کار میکنند و عملکردی را تولید میکنند که با نام تقویتکنندگی ولتاژ شناخته میشود. در یک تقویتکننده ولتاژ ایده آل مقاومت ورودی بسیار بزرگ و مقاومت ایده آل خروجی بسیار کوچک است.
بنابراین، آرایش فیدبک سری-موازی به عنوان یک تقویتکننده ولتاژ عمل میکند؛ زیرا سیگنال خروجی از جنس ولتاژ و سیگنال ورودی نیز از جنس ولتاژ است. بهره انتقال (Transfer Gain) برابر با خواهد بود. به این نکته توجه کنید که این مقدار بدون واحد (Dimensionless) محسوب میشود؛ زیرا واحد به صورت است.
سیستم فیدبک موازی-سری
فیدبک موازی-سری، با عنوان فیدبک جریان موازی نیز شناخته میشود و به عنوان یک سیستم فیدبک کنترلشده جریان-جریان عمل میکند. سیگنال فیدبک با جریان خروجی که در بار جاری میشود، متناسب است، در واقع سیگنال فیدبک به صورت موازی با ورودی قرار گرفته است. نمایی از این آرایش در شکل زیر دیده میشود.

برای فیدبک موازی-سری، پیکربندی به صورت جریان خروجی به جریان ورودی تعریف شده است. در این پیکربندی، سیگنال فیدبک به صورت موازی با سیگنال ورودی قرار گرفته است و به همین دلیل، جریانها (نه ولتاژها) با یکدیگر جمع میشوند.
این اتصال فیدبک موازی در حالت عادی بر بهره ولتاژ مدار تاثیر نخواهد گذاشت؛ زیرا برای خروجی ولتاژ به یک ورودی ولتاژ نیز احتیاج است. با این حال، اتصال سری در خروجی، مقاومت خروجی را افزایش میدهد، اما مسیر با اتصال موازی در ورودی، مقاومت ورودی را کاهش میدهد.
بنابراین پیکربندی فیدبک موازی-سری به عنوان یک تقویتکننده جریان کار میکند؛ زیرا سیگنال ورودی از جنس جریان و سیگنال خروجی نیز از جنس جریان است. بهره انتقال به صورت محاسبه میشود. توجه کنید که این کمیت هم بدون واحد محسوب میشود؛ زیرا واحد آن به صورت است.
سیستم فیدبک سری-سری
سیستم فیدبک سری-سری، با نام فیدبک جریان سری نیز شناخته میشود و به عنوان سیستم فیدبک کنترلشده جریان-ولتاژ عمل میکند. در پیکربندی جریان سری، سیگنال خطای فیدبک به صورت سری با ورودی بوده و با جریان بار متناسب است. در واقع این نوع فیدبک، سیگنال جریان را به سیگنال ولتاژ تبدیل میکند (که باز خورانده میشود) و این سیگنال ولتاژ است که از ورودی کسر میشود. نمایی از این پیکربندی در شکل زیر دیده میشود.

برای اتصال سری-سری، پیکربندی بر حسب جریان خروجی به ولتاژ ورودی تعریف شده است. به دلیل اینکه جریان خروجی از طریق اتصال سری و به صورت ولتاژ باز خورانده میشود، در نتیجه هم امپدانس ورودی و هم امپدانس خروجی سیستم افزایش مییابد. بنابراین، مدار به صورت یک تقویتکننده ترارسانا (Transconductance) کار میکند که در آن مقاومت ایده آل ورودی و نیز مقاومت ایده آل خروجی بسیار بزرگ هستند.
پس در حالت کلی میتوان گفت که پیکربندی فیدبک سری-سری مانند یک سیستم تقویتکننده ترارسانا عمل میکند که در آن سیگنال ورودی از جنس ولتاژ و سیگنال خروجی از جنس جریان است. به همین دلیل تابع انتقال سیستم فیدبک سری-سری به صورت محسوب میشود.
سیستم فیدبک موازی-موازی
سیستم فیدبک موازی-موازی، با نام فیدبک ولتاژ موازی نیز شناخته میشود و به عنوان سیستم فیدبک کنترلشده جریان-ولتاژ عمل میکند. در پیکربندی فیدبک موازی-موازی، سیگنال فیدبک به صورت موازی با سیگنال ورودی قرار گرفته است. ولتاژ خروجی اندازهگیری میشود و جریان از جریان ورودی موازی تفریق میشود. پس در این پیکربندی، این سیگنال جریان است که تفریق میشود نه سیگنال ولتاژ. نمایی از این پیکربندی در شکل زیر دیده میشود.

برای اتصال موازی-موازی، پیکربندی بر حسب ولتاژ خروجی به جریان ورودی تعریف میشود. چون ولتاژ خروجی به صورت جریان به یک پورت جریان ورودی باز خورانده میشود، در نتیجه اتصال موازی در هر دو ترمینال ورودی و خروجی منجر به کاهش امپدانس ورودی و خروجی میشود. بنابراین سیستم بیشتر به عنوان یک سیستم مقاومت انتقالی (Transresistance) با مقاومت ایدهآل ورودی و مقاومت خروجی بسیار کوچک عمل میکند.
پس میتوان گفت پیکربندی ولتاژ شنت به عنوان یک تقویتکننده ولتاژ مقاومت انتقالی محسوب میشود که سیگنال ورودی از جنس جریان و سیگنال خروجی از جنس ولتاژ است. بنابراین بهره انتقالی به صورت محاسبه میشود.
خلاصه فیدبک در الکترونیک
در این مقاله با موضوع کاربرد فیدبک در الکترونیک آشنا شدیم و نیز انواع مختلف فیدبک در الکترونیک را بررسی کردیم. سیستم فیدبک، سیستمی است که در آن از سیگنال خروجی نمونهبرداری میشود و سپس برای تشکیل سیگنال خطا به ورودی باز خورانده میشود. این سیگنال خطا برای کنترل وضعیت سیستم مورد استفاده قرار میگیرد و بسته به نوع فیدبک مورد استفاده، سیگنال فیدبکی که با سیگنال ورودی ترکیب میشود، میتواند یا از جنس ولتاژ و یا از جنس جریان باشد.

فیدبک همیشه منجر به تغییر وضعیت عملکرد سیستم میشود. نوع آرایش فیدبک میتواند به صورت سیستم فیدبک مثبت و یا منفی باشد. اگر حلقه فیدبک اطراف سیستم منجر به تولید بهره حلقه منفی شود، آنگاه گفته میشود که اصطلاحا نوع فیدبک منفی است. مهمترین تاثیر فیدبک منفی در یک مدار کاهش بهره سیستم است.
از طرف دیگر، اگر بهره اطراف حلقه مقداری مثبت باشد، آنگاه گفته میشود که سیستم دارای فیدبک نوع مثبت است. مهمترین تاثیر وجود فیدبک مثبت در یک مدار افزایش بهره کلی سیستم یا مدار است. این خاصیت فیدبک مثبت منجر به افزایش احتمال ناپایداری در یک سیستم میشود و همچنین احتمال نوسانی شدن سیستم، به خصوص زمانی که GH=1 باشد، به شدت افزایش مییابد.
همچنین از بلوک دیاگرام میتوان برای نشان دادن انواع مختلف سیستمهای فیدبک استفاده کرد. در بلوک دیاگرامهای ترسیم شده در بالا متغیرهای ورودی و خروجی میتوانند هم به صورت جریان و هم به صورت ولتاژ مدل شوند. به همین دلیل است که در حالت کلی میتوان گفت چهار ترکیب ورودی و خروجی ممکن در ایجاد یک فیدبک در مدار وجود دارد. این چهار ترکیب ورودی و خروجی در پیکربندیهایی به نام فیدبک ولتاژ سری، فیدبک ولتاژ موازی، فیدبک جریان سری و فیدبک جریان موازی نام گذاری شدهاند.
نامهای مختلفی که بر روی این پیکربندیها گذاشته شدهاند، بر حسب طریقه اعمال شبکه فیدبک بین طبقات ورودی و خروجی انتخاب شدهاند. نحوه این اتصال ممکن است یا به صورت موازی باشد و یا در موقعیت سری با یکدیگر قرار گرفته باشند.
اگر این مطلب برای شما مفید بوده است، آموزشهای زیر نیز به شما پیشنهاد میشوند:
- مجموعه آموزش مهندسی برق
- آموزش الکترونیک ۳
- مجموعه آموزشهای مهندسی کنترل
- آموزش سیستم های کنترل خطی
- فیدبک (Feedback) در سیستم های کنترل — مفاهیم اصلی
- اشمیت تریگر با اپ امپ — از صفر تا صد
- تایمر ۵۵۵ — راهنمای جامع
^^











سلام اشتباه توضیح دادین سیستم های فیدبک رو به عنوان مثال سیستم های فیدبک موازی – سری به عنوان یک سیستم فیدبک کنترل ولتاژ – ولتاژ عمل میکند که شما به اشتباه نوشتین جریان – جریان
سلام فرشاد عزیز.
متن بازبینی شد و اشتباهی در آن یافت نشد.
سپاس از همراهیتان با مجله فرادرس.
سلام
بهتر بود یه اشاره ای به مرجعی که ترجمه فرمودید میکردید
با تشکر از زحمات شما
سلام وقت شما بخیر؛
در صورت تالیف یا ترجمه بودن مطالب مجله فرادرس منبع آنها در انتهای مطلب و پس از بخش معرفی آموزشها و مطالب مرتبط آمده است.
از اینکه با مجله فرادرس همراه هستید از شما سپاسگزاریم.
سلام.برای محاسبه بهره حلقه فیدبک باید چکار کرد؟
یکی از سوالات برق ۹۸ همین بوده