


گشتاور قطبی – از صفر تا صد
اگر یک دیسک و یک جعبه را روی سطحی شیبدار قرار دهیم، در این صورت مدت زمان رسیدن آنها به پایین سطح متفاوت است. دلیل این امر، حرکت غلتشی دیسک است. در حقیقت مفهومی تحت عنوان گشتاور قطبی برای هر سطح تعریف میشود که نشاندهنده میزان تمایل حرکت دورانی یک جسم است. بهمنظور درک بهتر مطلب پیشنهاد میشود مطالب لختی دورانی،ممان اینرسی و مرکز جرم را مطالعه فرمایید.


گشتاور قطبی
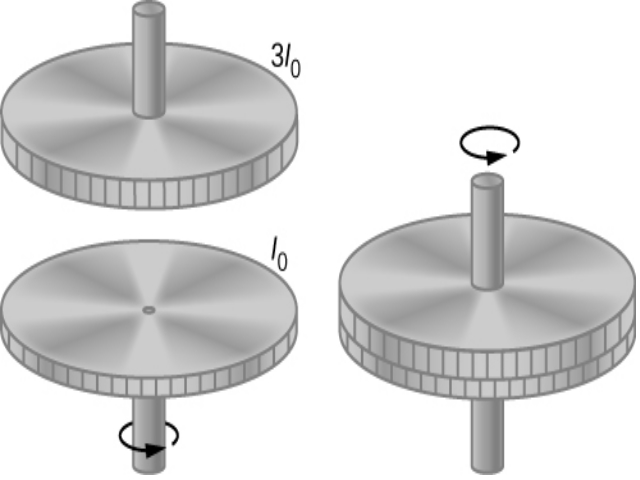
گشتاور قطبی اینرسی یا گشتاور دوم سطح برابر با انتگرالی است که توصیف کننده مقاومتِ حرکت یک جسم در مقابل حرکت دورانی است. توجه داشته باشید که سطح مقطع استوانه مذکور میتواند در راستای طولی نیز متفاوت باشد.
بنابراین میتوان گفت برای هر جسمی فارغ از میزان جرم، میتوان عددی تعریف کرد که میزان تمایل آن به دوران را نشان دهد. در نتیجه هرچه میزان گشتاور دوم بیشتر باشد، تمایل جسم به دوران نیز کاهش خواهد یافت.
بدست آوردن گشتاور قطبی
بهمنظور بدست آوردن رابطه گشتاور قطبی، در ابتدا دیفرانسیلِ قرار گرفته در یک جسم را بهصورت زیر در نظر بگیرید.

در قدم بعدی، کافی است انتگرال دوگانه دیفرانسیلهای سطحی را روی کل سطح محاسبه کرد. توجه داشته باشید که با توجه به تصویر فوق، هدف محاسبه گشتاور قطبی حول مبدأ است. بنابراین گشتاور قطبی برابر است با:
دقت کنید که نشاندهنده فاصله بین دیفرانسیل و محلی است که دوران حول آن رخ میدهد. با استفاده از قانون فیثاعورث میتوان را بهشکل زیر بازنویسی کرد.
از طرفی لختیهای دورانی حول محورهای و نیز برابرند با:
بنابراین میتوان گفت گشتاور قطبی برابر با مجموع لختیهای دورانی حول محورهای و است. در نتیجه گشتاور قطبی را میتوان بهصورت زیر بیان کرد:
برای اجسامی که دوران آنها نسبت به محورهای شان متقارن هستند، گشتاور قطبی را میتوان، دو برابر گشتاور در راستای یا در نظر گرفت.
البته در بسیاری از موارد میتوان از مختصات استوانهای یا کروی بهمنظور محاسبه گشتاور قطبی استفاده کرد. در ادامه با استفاده از مختصات استوانهای، گشتاور قطبی برای استوانه بدست آمده است.

توجه داشته باشید که واحدِ برای گشتاور قطبی سطح برابر با توان چهارم طول بیان میشود.
کاربردهای گشتاور قطبی
اگرچه در اکثر موارد از گشتاور قطبی بهمنظور محاسبه جابجایی زاویهای استفاده میشود، با این حال توجه داشته باشید که فرضِ صلب بودن جسم، نمیتواند تاثیر مقاومت پیچشی را از بین ببرد و این تاثیر نیز باید در نظر گرفته شود. معمولا میزان صلبیت یک ماده را با استفاده از ضریبی تحت عنوانِ یا همان مدول برشی میسنجند.
بنابراین با ترکیب مدول برشی و گشتاور قطبی، میزان زاویه پیچشیِ یک مقطع در نتیجه اعمال گشتاور پیچشیِ ، برابر با رابطه زیر بدست میآید.
در رابطه فوق، برابر با طول شفت و ، گشتاور پیچشی وارد شده به آن است. همانطور که رابطه فوق نیز نشان میدهد، هرچه مقادیر و بیشتر باشند، میزان پیچشِ جسم نیز در نتیجه گشتاور وارد شده به آن کمتر است. خوب است بدانید که میزان تنش برشی ایجاد شده در مقطع نیز وابسته به گشتاور قطبی است. در ادامه تنشِ بر حسب بیان شده است.
در رابطه فوق، ، گشتاور پیچشی وارد شده به مقطع، ، فاصله تا مرکز دوران و نشاندهنده گشتاور قطبی نسبت به مرکز دوران است.
مثال
قطر شفت یک توربین گاز را با توجه به فرضیات زیر بدست آورید.
- توان منتقل شده توسط توربین برابر با است. این عدد، مقداری است که معمولا در نیروگاههای اتمی تولید میشود.
- تنش تسلیم شفتِ فولادی نیز برابر با است.
- انرژی الکتریکی تولید شده دارای فرکانسِ بوده که برابر با فرکانس استفاده شده در اروپا است. توجه داشته باشید که این فرکانس در آمریکای شمالی برابر با در نظر گرفته شده است. همچنین فرض کنید که سرعت زاویهای توربین نیز با استفاده از فرکانس زاویهای برق تولید شده توسط آن محاسبه میشود (دلیل این امر این است که دوران شفت است که منجر به تغییر جهت جریان الکتریکی میشود).

در ابتدا سرعت زاویهای توربین را با استفاده از فرکانس برق تولید شده توسط آن، بهصورت زیر بدست میآوریم:
در نتیجه گشتاور خروجی توربین نیز برابر میشود با:
از طرفی مقدار ماکزیمم گشتاور قابل اعمال به شفت نیز با استفاده از تنش تسلیم و برابر با عددِ زیر بدست میآید.
حال کافی است که را در رابطه فوق قرار داده و معادله بدست آمده را بر حسب بازنویسی کرد (فرمول گشتاور قطبی برای استوانه را به خاطر بیاورید). در این صورت، مقدار مینیمم شعاع بهمنظور تسلیم نشدن شفت برابر است با:
در نتیجه قطر شفت توربین برابر با است. در طراحیهای واقعی، یک ضریب ایمنی مشخص برای قطعه در نظر گرفته میشود. با تقسیم تنش تسلیم بر ضریب ایمنی و محاسبه مجدد، قطر شفت بر اساس حاشیه اطمینان به دست میآید.




خوب بود فقط اخرمثال رو نفهمیدم r چجوری حساب شد
سلام و وقت بخیر؛
در متن مقاله، فرمول گشتاور قطبی برای استوانه به صورت J=Iz=2πr4 آورده شده است. این فرمول را در رابطه τ=JzTr جایگذاری کرده و آن را برای به دست آوردن r بازنویسی کنید. به این ترتیب به فرمول r=3πτmax2Tmax میرسید. در این فرمول، تنش تسلیم (همان تنش برشی حداکثر) را داریم. گشتاور را هم طبق فرمولهای معرفی شده به دست میآوریم. به این ترتیب و با قرار دادن مقادیر در رابطه r، شعاع شفت توربین محاسبه میشود. البته صورت سوال از ما قطر را میخواهد، بنابراین شعاع را ضرب در ۲ میکنیم.
از همراهی شما با مجله فرادرس سپاسگزاریم