



تابع توصیفی – از صفر تا صد
تابع توصیفی یا توصیف کننده یک روش تقریبی برای تحلیل دستهای از مسائل در کنترل غیرخطی است. همانطور که میدانیم، سیستمهای کنترل خطی سیستمهایی هستند که اصل برهمنهی (اگر دو ورودی همزمان وارد کنیم، آنگاه خروجی برابر با مجموع خروجیهای آنها به تنهایی است) برای آنها برقرار است. برای سیستمهای غیرخطی، نمیتوانیم از اصل برهمنهی یا جمع آثار استفاده کنیم.


تحلیل سیستمهای کنترل غیرخطی مختلف به دلیل رفتار غیرخطی آنها بسیار دشوار است. در این سیستمها نمیتوانیم از روشهای تحلیل متداول مانند معیار پایداری نایکوئیست یا روش قطب-صفر برای تحلیلشان استفاده کنیم، زیرا این روشها محدود به سیستمهای خطی هستند. البته سیستمهای غیرخطی چند مزیت دارند:
- سیستمهای غیرخطی میتوانند عملکرد بهتری نسبت به سیستمهای خطی داشته باشند.
- سیستمهای غیرخطی نسبت به سیستمهای خطی هزینه کمتری دارند.
- آنها معمولاً در مقایسه با سیستمهای خطی از نظر اندازه کوچک و فشرده هستند.
در عمل، همه سیستمهای فیزیکی به نوعی ویژگی غیرخطی دارند. بعضی اوقات حتی ممکن است برای بهبود عملکرد سیستم یا اطمینان از عملکرد آن، غیر خطی بودن را با آگاهی به سیستم اضافه کنیم. در نتیجه، این سیستم اقتصادیتر از سیستم خطی خواهد بود.
یکی از سادهترین نمونههای سیستمهایی که خاصیت غیرخطی بودن عمداً به آن افزوده شده، رله کنترل شده یا روشن/خاموش است. به عنوان مثال، در یک سیستم گرمایش معمولی در خانه، وقتی دما از یک مقدار معین پایینتر بیاید، کوره روشن میشود. در اینجا میخواهیم دو نوع تحلیل یا روش مختلف را برای تحلیل سیستمهای غیرخطی معرفی کنیم. این دو روش در ادامه نوشته شدهاند و به طور خلاصه با کمک یک مثال مورد بحث قرار گرفتهاند.
- روش تابع توصیفی یا تابع توصیفکننده در سیستم کنترل
- روش صفحه فاز در سیستم کنترل
عوامل غیرخطی رایج
در اغلب سیستمهای کنترل، نمیتوانیم از حضور عوامل غیرخطی مشخص جلوگیری کنیم. سیستمی که در آن رابطه غیرخطی بین ورودی و خروجی وجود داشته باشد، که شامل معادله دیفرانسیل نباشد، یک غیرخطی استاتیک نامیده میشود. از طرف دیگر، ورودی و خروجی ممکن است از طریق یک معادله دیفرانسیل غیرخطی مرتبط باشند. به چنین سیستمی غیرخطی پویا گفته میشود.
اکنون انواع مختلف عوامل غیرخطی بودن را در یک سیستم کنترل مورد بحث قرار میدهیم:
- غیرخطی ناشی از اشباع
- غیرخطی ناشی از اصطکاک
- غیرخطی ناشی از ناحیه مرده
- غیرخطی ناشی از رله (کنترلکننده روشن/خاموش)
- غیرخطی ناشی از لقّی
غیرخطی اشباع
غیرخطی اشباع نوع متداول غیرخطی است. به عنوان مثال، این غیرخطی بودن را در اشباع در منحنی مغناطیسی موتور DC مشاهده میکنیم. برای درک این نوع غیرخطی بودن، منحنی اشباع یا منحنی مغناطیسی شکل زیر را بررسی میکنیم.

از منحنی فوق میتوان چنین دریافت که خروجی نشاندهنده رفتار خطی در ابتدای کار است، اما پس از آن اشباع در منحنی وجود دارد که یک نوع رفتار غیرخطی در سیستم محسوب میشود. منحنی تقریبی نیز در شکل نشان داده شده است.
این نوع غیرخطی اشباع را میتوانیم در یک آمپلیفایر که خروجی آن فقط در بازه محدودی از مقادیر ورودی متناسب با آن است مشاهده کنیم. هنگامی که ورودی از این دامنه فراتر رود، خروجی تمایل به غیرخطی شدن پیدا میکند.
غیرخطی اصطکاک
هر چیزی که مخالف حرکت نسبی جسم باشد، اصطکاک نامیده میشود. غیرخطی بودن ناشی از اصطکاک نوعی غیرخطی بودن است که در سیستم وجود دارد. مثال رایج در موتور الکتریکی است که در آن اصطکاک نیروی کولمب را به دلیل تماس مالش بین جاروبکها و کموتاتور مشاهده میکنیم.

اصطکاک در سه دسته زیر تقسیمبندی میشود:
- اصطکاک ایستایی: به عبارت ساده، اصطکاک استاتیک بر جسم وارد میشود، هنگامی که آن جسم در حال استراحت باشد.
- اصطکاک جنبشی: اصطکاک دینامیکی هنگام حرکت نسبی بین سطح و جسم روی جسم عمل میکند.
- اصطکاک محدودکننده: به عنوان حداکثر مقدار محدود کردن اصطکاک تعریف میشود که هنگام استراحت روی جسم عمل میکند.
اصطکاک جنبشی را میتوان به عنوان (الف) اصطکاک لغزشی (ب) اصطکاک غلتشی طبقهبندی کرد. اصطکاک لغزشی هنگامی عمل میکند که دو جسم روی یکدیگر قرار گرفته باشند، در حالی که دیگری در هنگام غلتش یک جسم روی دیگری عمل میکند.
در سیستم مکانیکی دو نوع اصطکاک وجود دارد: (الف) اصطکاک ویسکوز (ب) اصطکاک استاتیک یا ایستایی.
غیرخطی ناحیه مرده
غیرخطی ناحیه مرده در دستگاههای الکتریکی مختلف مانند موتورها، سروو موتورهای DC، محرکها و غیره وجود دارد. غیرخطی نوع ناحیه مرده به شرایطی اطلاق میشود که خروجی در هنگام عبور از مقدار محدودکننده خاصی، صفر میشود.

غیرخطی رله (کنترلکننده روشن/خاموش)
رلههای الکترومکانیکی به کرات در سیستمهای کنترلی که به یک سیگنال کنترل دو یا سه وضعیتی نیاز دارند به کار میروند. این رلهها کنترلکننده روشن/خاموش یا کنترلکننده دووضعیتی نیز نامیده میشوند. رله غیرخطی (الف) روشن/خاموش (ب) روشن/خاموش با هیسترزیس (ج) روشن/خاموش با ناحیه مرده است.

شکل (الف) ویژگیهای ایدهآل یک رله دوطرفه را نشان میدهد. در عمل، رله فوراً پاسخ نخواهد داد. برای جریانهای ورودی بین دو لحظه سوئیچینگ (کلیدزنی)، رله، بسته به سابقه قبلی ورودی، ممکن است در موقعیت خاصی قرار داشته باشد. این ویژگی روشن/خاموش هیسترزیس نامیده میشود که در شکل (ب) نشان داده شده است. یک رله همچنین در عمل دارای مقدار مشخصی از ناحیه مرده است که در شکل (ج) نشان داده شده است. ناحیه مرده به این دلیل ایجاد میشود که سیمپیچ میدان رله برای جابهجایی آرمیچر به مقدار محدودی جریان نیاز دارد.
غیرخطی لقّی
یکی دیگر از غیرخطیهای مهم که معمولاً در سیستم فیزیکی رخ میدهد، هیسترزیس در انتقالهای مکانیکی مانند دندانههای چرخدنده و رابطها است. این نوع غیرخطی تا حدودی با هیسترزیس مغناطیسی متفاوت است و معمولاً به آن غیرخطی لقی گفته میشود. لقی در حقیقت بازی بین دندانههای چرخدندهها است. یک جعبهدنده همانطور که در شکل (الف) نشان داده شده است، دارای لقی است که در شکل (ب) مشخص شده است.

شکل (ب) دندانه چرخدنده را که بین دندانههای و چرخدنده دیگر قرار دارد نشان میدهد. شکل (ج) نمایانگر ارتباط بین حرکات ورودی و خروجی است. از آنجا که دندانه در این موقعیت در جهت عقربههای ساعت حرکت میکند، هیچ حرکتی روی خروجی صورت نمیگیرد تا زمانی که دندانه پس از طی مسافت با دندانه تماس برقرار کند. این حرکت خروجی با قطعه شکل (ج) مطابقت دارد. اگر نسبت چرخدنده واحد فرض شود، دندانه در خلاف جهت عقربههای ساعت در همان زاویه چرخدنده چرخانده میشود. این موضوع توسط خط نشان داده شده است. با وارون شدن حرکت ورودی، تماس بین دندانههای و از بین میرود و دندانه براساس این فرض که بار با اینرسی قابل چشمپوشی کنترل شده، ثابت میشود.
بنابراین، حرکت خروجی تا زمانی که دندانه مسافت را در جهت معکوس طی کند، ادامه دارد. این موضوع، در شکل (ج) توسط بخش نشان داده شده است. بعد از اینکه دندانه با دندانه تماس برقرار کرد، چرخدنده، همانطور که توسط قطعه نشان داده شده است، در جهت عقربههای ساعت حرکت میکند. با حرکت معکوس، چرخدنده قطعه را میسازد و سپس امتداد را دنبال میکند.
تحلیل تابع توصیفی سیستمهای غیرخطی
روش تابع توصیفی در سیستم کنترل، توسط «نیکولای میتروفانویچ کرایلف» (Nikolay Mitrofanovich Krylov) و «نیکولای بوگولیوبوف» (Nikolay Bogoliubov) در سال ۱۹۳۰ معرفی شد و پس از آن، «رالف کوچنبرگر» (Ralph Kochenburger) آن را گسترش داد.
از روش تابع توصیفی در کلیه روشهای تحلیلی که طی سالها برای سیستمهای کنترل غیرخطی ایجاد شده است، برای بررسی پایداری یک سیستم غیرخطی استفاده میشود. این روش، در واقع، تعمیمی تقریبی از روشهای پاسخ فرکانسی از جمله معیار پایداری نایکوئیست برای سیستمهای غیرخطی است.
روش تابع توصیفی یک سیستم غیرخطی به صورت نسبت مختلط دامنه و زاویه فاز بین اجزای هارمونیک اصلی خروجی به ورودی سینوسی تعریف شده است. همچنین میتوانیم آن را تابع توصیفی سینوسی نیز بنامیم. از نظر ریاضی، میتوان نوشت:
که در آن، تابع توصیفی یا توصیف کننده، دامنه سینوسی ورودی، دامنه مؤلفه هارمونیک اصلی خروجی و جابهجایی فاز مؤلفه هارمونیک اصلی ورودی است.
در ادامه، درباره مفهوم تابع توصیفی یک سیستم کنترل غیرخطی بحث میکنیم.
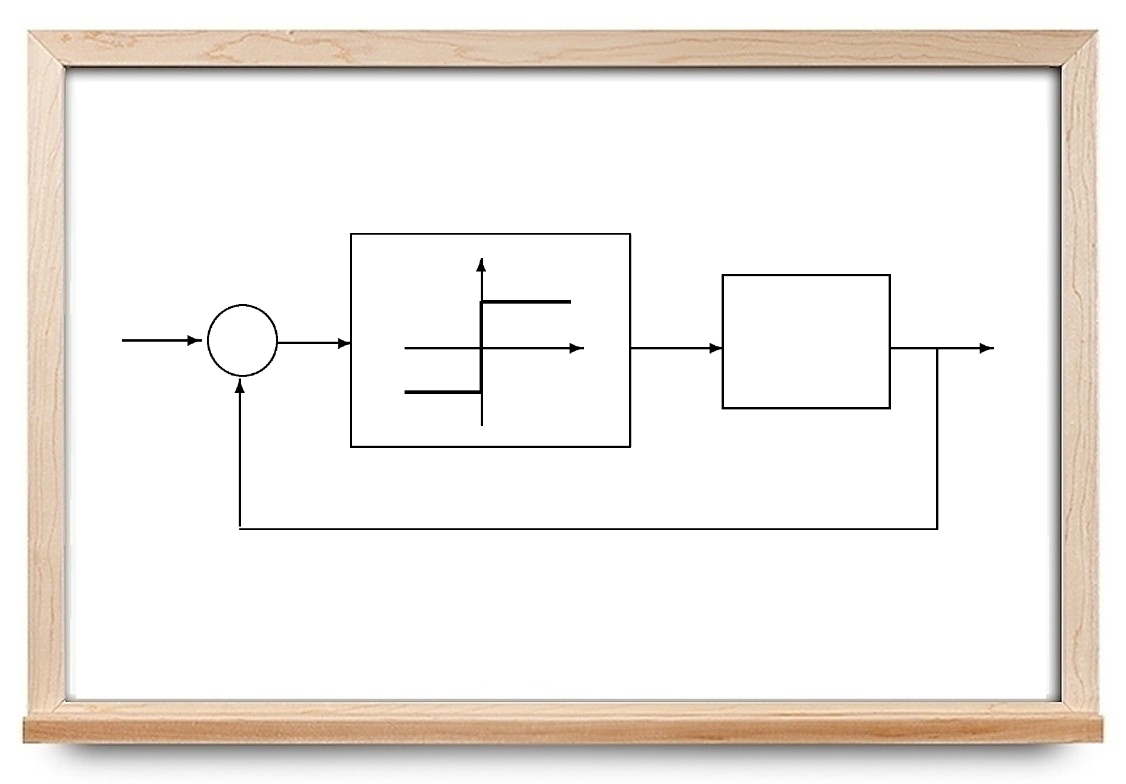
نمودار بلوکی یک سیستم غیرخطی را در نظر بگیرید که و مؤلفههای خطی و عنصر غیرخطی را نشان میدهد.

فرض کنید ورودی که به بخش غیرخطی وارد میشود، سینوسی باشد، یعنی:
برای این ورودی، خروجی بخش غیرخطی یک تابع متناوب سینوسی است که میتوان آن را برحسب سری فوریه نوشت:
اغلب غیرخطی بودنها متقارن فرد یا نیمهمتقارن فرد هستند؛ مقدار میانگین برای چنین مواردی صفر است و در نتیجه، خروجی برابر خواهد بود با:
از آنجا که مشخصه پایینگذر دارد، میتوان با تقریب مناسبی فرض کرد که همه هارمونیکهای مرتبه بالای فیلتر میشوند و ورودی به بخش غیرخطی حای مؤلفه اصلی ، یعنی هارمونیک اول است. بنابراین در تحلیل تابع توصیف کننده، فقط مؤلفه اصلی هارمونیک خروجی را در نظر میگیریم، زیرا هارمونیکهای بالاتر در خروجی سیستم غیرخطی اغلب از دامنه کوچکتری نسبت به دامنه هارمونیک اصلی دارند. اغلب سیستمهای کنترل فیلترهای پایینگذر هستند، به این ترتیب که هارمونیکهای بالاتر در مقایسه با مؤلفه هارمونیک اصلی بسیار ضعیف میشوند.
تنها لازم است را در نظر بگیریم:
میتوانیم را به فرم زیر بنویسیم:
که در آن، با استفاده از فازورها، داریم:
ضرایب و سری فوریه به صورت زیر محاسبه میشوند:
طبق تعریف تابع توصیف کننده، داریم:
در ادامه، تابع توصیفی را برای عوامل غیرخطی که پیشتر معرفی کردیم، به دست میآوریم.
تابع توصیفی غیرخطی اشباع
منحنی مشخصه اشباع در شکل زیر نشان داده شده است.

تابع ورودی زیر را در نظر بگیرید:
اکنون با توجه به منحنی، میتوانیم خروجیهای را به صورت زیر بنویسیم:
ابتدا ثابت سری فوریه را محاسبه میکنیم:
با جایگزین کردن مقدار خروجی در معادله فوق و انتگرالگیری تابع از تا ، مقدار ثابت برابر با صفر به دست میآید.
به طور مشابه، میتوان مقدار ثابت سری فوریه را برای خروجی داده شده محاسبه کرد و مقدار را میتوان به صورت زیر به دست آورد:
وقتی ، آنگاه . بنابراین، داریم:
زاویه فاز تابع توصیفی را میتوان به صورت زیر محاسبه کرد:
بنابراین، تابع توصیفی اشباع به شکل زیر است:
تابع توصیفی رله ایدهآل
منحنی مشخصه رله ایدهآل در شکل زیر نمایش داده شده است.

تابع ورودی زیر را در نظر میگیریم:
اکنون با توجه به منحنی، خروجی را به دست میآوریم:
تابع متناوب خروجی فرد است:
ابتدا ثابت سری فوریه را محاسبه میکنیم:
با جایگذاری مقدار خروجی در معادله بالا و انتگرالگیری از تابع از تا ، مقدار ثابت برابر با صفر به دست خواهد آمد.
به طور مشابه، میتوانیم مقدار ثابت سری فوریه را برای خروجی داده شده محاسبه کرده و مقدار را به صورت زیر به دست آوریم:
با جایگذاری مقدار خروجی مقدار ثابت به صورت زیر خواهد بود:
و زاویه فاز تابع توصیف کننده را میتوان به صورت زیر محاسبه کرد:
بنابراین، تابع توصیفی رله ایدهآل برابر است با:
تابع توصیفی رله واقعی (رله با ناحیه مرده)
شکل زیر منحنی مشخصه یک رله واقعی را نشان میدهد. اگر کوچکتر از ناحیه مرده باشد، آنگاه رله خروجی نخواهد داشت و هارمونیک اول سری فوریه و در نتیجه تابع توصیف کننده نیز صفر خواهند بود. اگر باشد، رله خروجی دارد.

ورودی زیر را در نظر میگیریم:
اکنون از روی نمودار میتوانیم خروجی را به صورت زیر تعریف کنیم:
که در آن،
تابع متناوب خروجی تقارن فرد دارد:
ابتدا ثابت سری فوریه را محاسبه میکنیم:
با جایگذاری مقدار در خروجی در معادله بالا و انتگرالگیری از تابع از تا مقدار ثابت برابر با صفر به دست خواهد آمد.
به طور مشابه، مقدار ثابت سری فوریه را برای خروجی داده شده محاسبه میکنیم:
به دلیل خاصیت تقارن ، ضریب را میتوان به صورت زیر محاسبه کرد:
بنابراین، تابع توصیفی برابر است با:
تابع توصیفی لقی
منحنی مشخصه لقی در شکل زیر نشان داده شده است. ورودی زیر را در نظر بگیرید:

اکنون با توجه به منحنی، خروجی را به صورت زیر به دست میآوریم:
ابتدا ضریب سری فوریه را محاسبه میکنیم:
با جایگذاری مقدار خروجی در معادله بالا و انتگرالگیری از تابع از تا مقدار ثابت محاسبه میشود:
به طور مشابه، میتوانیم مقدار ضریب سری فوریه را برای خروجی به دست آوریم و مقدار را میتوان به صورت زیر محاسبه کرد:
با جایگذاری مقدار خروجی در معادله بالا و انتگرالگیری از تابع از صفر تا ، مقدار ضریب به دست میآید:
به سادگی میتوان تابع توصیف کننده لقی را از معادله زیر محاسبه کرد:










