شما در حال مطالعه نسخه آفلاین یکی از مطالب «مجله فرادرس» هستید. لطفاً توجه داشته باشید، ممکن است برخی از قابلیتهای تعاملی مطالب، مانند امکان پاسخ به پرسشهای چهار گزینهای و مشاهده جواب صحیح آنها، نمایش نتیجه آزمونها، پاسخ تشریحی سوالات، پخش فایلهای صوتی و تصویری و غیره، در این نسخه در دسترس نباشند. برای دسترسی به نسخه آنلاین مطلب، استفاده از کلیه امکانات آن و داشتن تجربه کاربری بهتر اینجا کلیک کنید.
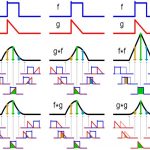
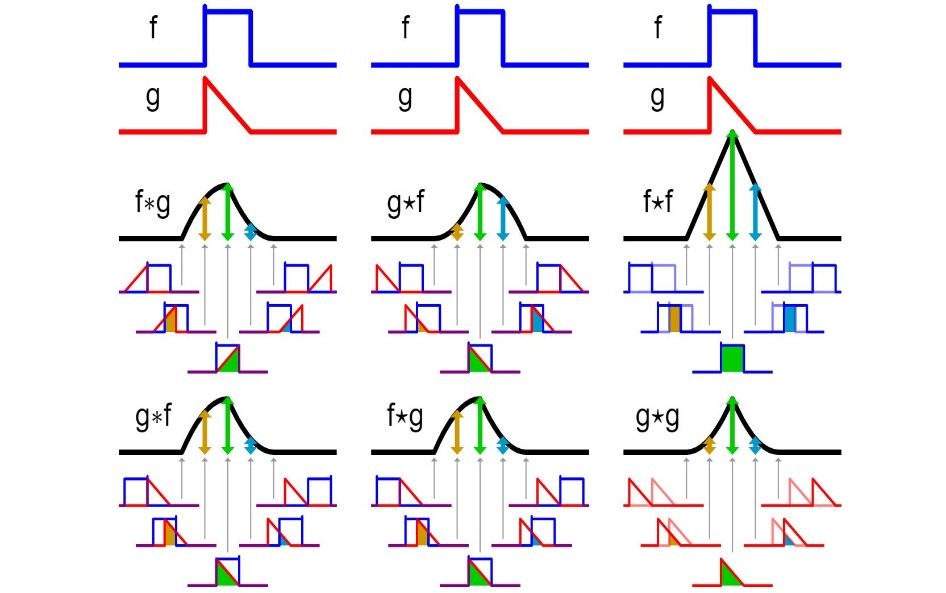
در مطالب گذشته وبلاگ فرادرس در مورد نحوه محاسبه انتگرال کانولوشن صحبت شد. در این مطلب قصد داریم تا یکی از کاربردهای این انتگرال را توضیح دهیم. با استفاده از این انتگرال میتوان سیستم خطی تغییرناپذیر نسبت به زمان را تحلیل کرد. این نوع از سیستمها در آمار و البته در مهندسی کنترل کاربرد بسیاری دارند.
یک سیستم خطی تغییرناپذیر با زمان را میتوان با استفاده از پاسخ ضربهای آن شناسایی کرد. بهطور دقیقتر فرض کنید X(t) سیگنال ورودی یک سیستم باشد. در این صورت خروجی سیستم یا همان Y(t) را میتوان بهصورت زیر بیان کرد:
به انتگرال فوق اصطلاحا، کانوولوشن h و X گفته شده و میتوان عبارت فوق را بهصورت زیر نیز نشان داد.
Y(t)=h(t)∗X(t)=X(t)∗h(t)
توجه داشته باشید که انتگرال فوق را میتوان در حالتی که سیگنال ورودی بهصورت یک تابع ضربه باشد، بدست آورد (x(t)=δ(t)). برای یک سیستم زمانی گسسته، خروجی را میتوان بهصورت زیر بیان کرد:
Y(t)=h(t)∗X(t)=X(t)∗h(t)
تابع ضربه گسسته را میتوان با استفاده از تابع دوضابطهای زیر نیز تعریف کرد:
سیستمی مستقل زمانی را در نظر بگیرید که پاسخ ضربه آن برابر با h(t) باشد. اگر X(t) یک ورودی تصادفی باشد، در این صورت خروجی Y(t) نیز تصادفی است. این خروجی را میتوان با استفاده از تبدیل کانولوشن زیر بیان کرد:
در اینجا هدف ما آن است که اثبات کنیم دو سینگال X(t) و Y(t) فرآیندهایی تصادفی هستند. در ابتدا میتوان گفت مقدار میانگین Y(t) یا μY(t)، مطابق با رابطه زیر بدست میآید.
با توجه به رابطه فوق میتوان گفت که دو سیگنال X(t) و y(t) فرآیند پایا هستند.
قضیه
فرض کنید X(t) یک فرآیند پایا بوده و Y(t) نیز مطابق با رابطه زیر بدست آید.
Y(t)=h(t)∗X(t)
در رابطه فوق h(t) پاسخ سیستم است. در این صورت X(t) و Y(t)، فرآیندهایی پایا محسوب شده و سه رابطه زیر برقرار هستند.
μY(t)=μY=μX∫−∞∞h(α)dα
RXY(τ)=h(−τ)∗RX(τ)=∫−∞∞h(−α)RX(t−α)dα
RY(τ)=h(τ)∗h(−τ)∗RX(τ)
تحلیل دامنه فرکانس
حال میخواهیم قضیه ارائه شده در بالا را در دامنه فرکانس بیان کنیم. بدین منظور فرض کنید H(f) برابر با تبدیل فوریه تابع h(t) باشد. در این صورت میتوان گفت:
H(f)=F{h(t)}=∫−∞∞h(t)e−2jπftdt.
H(f) تحت عنوان تابع انتقال سیستم شناخته میشود. بنابراین μY را میتوان بهصورت زیر بازنویسی کرد.
μY=μX∫−∞∞h(α)dα
نهایتا میتوان گفت:
μY=μXH(0)
از آنجایی که h(t) بهعنوان یک سیگنال حقیقی در نظر گرفته شده، بنابراین داریم:
\begin{align*} \mathcal { F } \{ h ( - t ) \} = H ( - f ) = H ^ {*}(f)
\end{align*}
در رابطه فوق ∗ نشاندهنده مزدوج مختلط است. با محاسبه تبدیل فوریه از طرفین RXY(τ)=RX(τ)∗h(−τ)، رابطه زیر را میتوان نتیجه گرفت.
«مجید عوضزاده»، فارغ التحصیل مقطع کارشناسی ارشد رشته مهندسی مکانیک از دانشگاه تهران است. فیزیک، ریاضیات و مهندسی مکانیک از جمله مباحث مورد علاقه او هستند که در رابطه با آنها تولید محتوا میکند.
شما در حال مطالعه نسخه آفلاین یکی از مطالب «مجله فرادرس» هستید. لطفاً توجه داشته باشید، ممکن است برخی از قابلیتهای تعاملی مطالب، مانند امکان پاسخ به پرسشهای چهار گزینهای و مشاهده جواب صحیح آنها، نمایش نتیجه آزمونها، پاسخ تشریحی سوالات، پخش فایلهای صوتی و تصویری و غیره، در این نسخه در دسترس نباشند. برای دسترسی به نسخه آنلاین مطلب، استفاده از کلیه امکانات آن و داشتن تجربه کاربری بهتر اینجا کلیک کنید.