شما در حال مطالعه نسخه آفلاین یکی از مطالب «مجله فرادرس» هستید. لطفاً توجه داشته باشید، ممکن است برخی از قابلیتهای تعاملی مطالب، مانند امکان پاسخ به پرسشهای چهار گزینهای و مشاهده جواب صحیح آنها، نمایش نتیجه آزمونها، پاسخ تشریحی سوالات، پخش فایلهای صوتی و تصویری و غیره، در این نسخه در دسترس نباشند. برای دسترسی به نسخه آنلاین مطلب، استفاده از کلیه امکانات آن و داشتن تجربه کاربری بهتر اینجا کلیک کنید.
در مطلبی در مجله فرادرس نگاشت انقباضی و کاربرد آن را در معادلات کپلر توضیح دادیم. از این رو در این مطلب قصد داریم تا نوعی دیگر از نگاشت را در قالب ماتریس دوران توضیح دهیم. با استفاده از ماتریس دوران میتوان معادلات اشکال دورانیافته را به شکلی سادهتر نوشته و نوع آنها را نیز تشخیص داد.
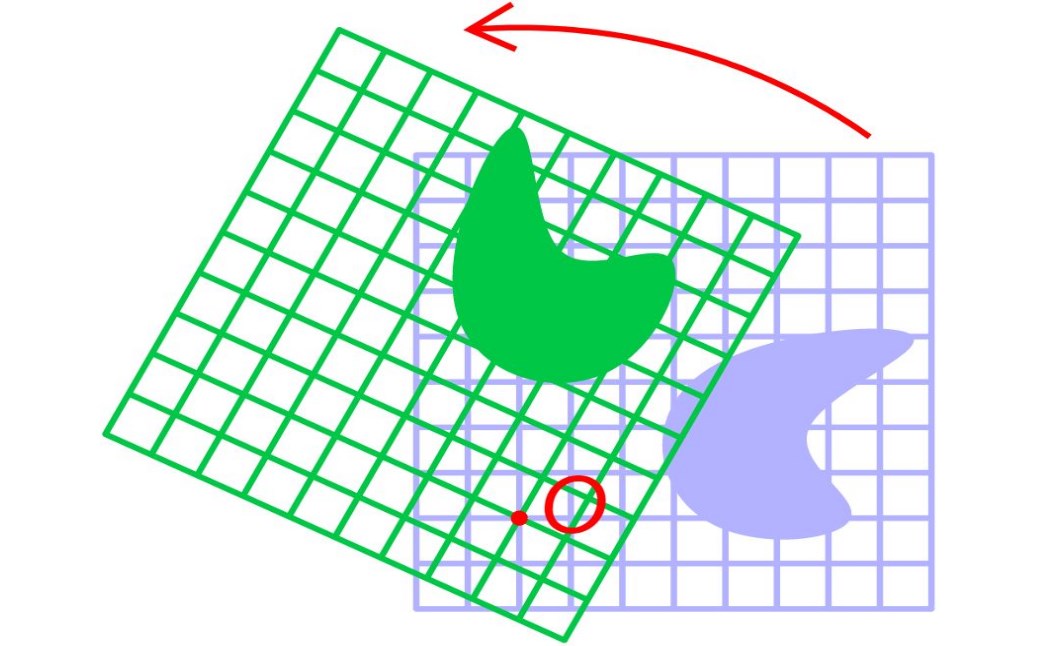
در ریاضیات، دوران محورها یا مقاطع به مسائلی در فضای دوبعدی گفته میشود که در آن دستگاه مختصات xy به اندازه θ دوران یافته و به x′y′ منتقل میشوند. توجه داشته باشید طی این دوران، مبدأ مختصات ثابت میماند. بنابراین میتوان گفت هر نقطه در دستگاه مختصات x′y′ به اندازه θ نسبت به دستگاه مختصات xy دوران کرده است. این دوران با استفاده از ماتریسی انجام میشود که با ضرب شدن در معادله یک شکل یا حتی نقطه، آن را دوران میدهد.
استفاده از دستگاههای مختصات به منظور مطالعه منحنیها و تغییرات آنها، اجتنابناپذیر هستند. بدین منظور محورهای مختصات در موقعیتهایی قرار میگیرند تا نسبت به منحنی در محل مناسبی قرار داشته باشند. به عنوان مثال، جهت مطالعه معادله یک بیضی و هذلولی معمولا کانونها روی یکی از محورها قرار گرفته و مرکز آن منطبق بر مبدا مختصات در نظر گرفته میشود.
اگر منحنی نسبت به محور مختصات در موقعیت مناسبی قرار نداشته باشد، میتوان با استفاده از نگاشت دورانی موقعیت منحنی را نسبت به محورها تنظیم کرد. به این فرآیند، تبدیل مختصات گفته میشود. در آینده و در مطلبی مجزا در این مورد نیز صحبت خواهیم کرد.
بدست آوردن دستگاه دوران یافته
فرض کنید دستگاه اولیه xy به اندازه θ حول مبدا، پادساعتگرد دوران کرده و دستگاه جدید را x′y′ مینامیم. همچنین فرض کنید در دستگاه xyمختصات قطبی نقطه P برابر با (r,α) باشد. در این صورت در دستگاه x′y′ مختصات قطبی نقطه P برابر با (r,α−θ) خواهد بود. مختصات اولیه برابر است با:
در نتیجه مختصات نقطه P در دستگاه مختصات x′ برابر است با:
x′=rcos(α−θ)=rcosαcosθ+rsinαsinθ معادله ۳
y′=rsin(α−θ)=rsinαcosθ−rcosαsinθ معادله ۴
با قرار دادن معادلات ۱ و ۲ در معادلات ۳ و ۴، مختصاتهای x′y′ بر حسب x,y برابر میشوند با:
x′=xcosθ+ysinθ معادله ۵
y′=−xsinθ+ycosθ معادله ۶
معادلات ۵ و ۶ را میتوان به صورت ماتریسی، مطابق با عبارت زیر بیان کرد:
(x′y′)=(cosθ−sinθsinθcosθ)(xy)
ماتریس فوق، نشاندهنده تبدیل استانداردی است که مختصات اولیه را به اندازه θ دوران میدهد. تبدیل فوق را میتوان به صورت عکس نیز بیان کرد. در ادامه رابطه مربوط به عکس تبدیل فوق نشان داده شده است.
x=x′cosθ−y′sinθ
y=x′sinθ+y′cosθ
البته شکل ماتریسی تبدیل فوق را نیز میتوان به صورت زیر بیان کرد:
(xy)=(cosθsinθ−sinθcosθ)(x′y′)
مثال ۱
مختصات نقطه P1=(x,y)=(3,1) را پس از دوران به اندازه 30 درجه بیابید.
محورها به اندازه 30 درجه به صورت پادساعتگرد چرخیده و مختصات جدید نقطه P برابر با P1=(x′,y′)=(2,0) بدست آمدهاند.
مثال ۲
مختصات نقطه P2=(x,y)=(7,7) پس از دوران محورهای مختصات به اندازه 90 درجه ساعتگرد را بیابید. در این مثال میخواهیم از روش ماتریس دوران استفاده کنیم. بنابراین مختصات نقطه در دستگاه جدید برابر است با:
در مطلب مقاطع مخروطی عنوان شد که شکل کلی رابطه توصیف کننده این مقاطع به صورت زیر هستند.
Ax2+Bxy+Cy2+Dx+Ey+F=0
با استفاده از ماتریس دوران میتوان محورهای مختصات را دوران داده و شکل معادله فوق را سادهتر کرد. اگر معادلات ۵ و ۶ را در رابطه فوق قرار دهیم، شکل جدید آن به صورت زیر در میآید.
اگر θ به نحوی انتخاب شود که رابطه cot2θ=(A−C)/B برقرار باشد، در این صورت ضریب B′=0 برابر با صفر بوده و ترم x′y′ نیز حذف خواهد شد. از این رو میتوان با دوران مناسبِ محورهای مختصات (انتخاب مقدار مناسب θ)، مقادیر غیرصفرِ B,D,E را صفر کرده و معادله اصلی را سادهتر کرد. برای نمونه شکل اولیه معادله بیضی زیر دارای ضرایب xy نیز است. با دوران دادن آن به صورت ساعتگرد و به اندازه θ، این ضرایب حذف خواهند شد.
شناسایی مقاطع دوران یافته
مقطع مخروطی دوران یافته را میتوان به صورت زیر تشخیص داد. در حقیقت علامت B2−4AC نشاندهنده شکل مقطع مخروطی است.
ابعاد بالاتر
فرض کنید دستگاه مختصاتی حول محور z خود به اندازه θ، به صورت پادساعتگرد دوران کند. مختصات z هر نقطه تغییر نخواهد کرد و این تنها z و y هستند که تغییر خواهند کرد. فرض کنید مختصات نقطه در دستگاه اولیه برابر با (x,y,z) و در دستگاه دوران یافته برابر با (x′,y′,z′) باشد. در این صورت رابطه بین نقاط را میتوان با استفاده از ماتریس زیر بیان کرد:
«مجید عوضزاده»، فارغ التحصیل مقطع کارشناسی ارشد رشته مهندسی مکانیک از دانشگاه تهران است. فیزیک، ریاضیات و مهندسی مکانیک از جمله مباحث مورد علاقه او هستند که در رابطه با آنها تولید محتوا میکند.
فقط شرط یکه متعامد سطرها یا ستون های برای متعامد بودن ماتریس کافی نیست؟ یا باید هم سطر ها و هم ستون ها یکه متعامد باشند؟
علیرضا شهامت
با عرض سلام و تشکر از وبلاگ خوبتان،
خواهشمندم به دو سوال زیر پاسخ دهید:
سوال اول : در ریاضی، اگر بخواهیم نقطه ی A به مختصات A.X و A.Y را حول نقطه ی B به مختصات B.X و B.Y با زاویه theta دوران دهیم، نقطه ی به دست آمده C خواهد بود.
مطلوب است: C.X و C.Y
سوال دوم: راه حل همین سوال در برنامه نویسی سی شارپ یا پایتون چه طور خواهد بود؟
صادق
سلام و وقت بخیر
در قسمت آخر که ماتریسهای دوران حول محورهای x،y،z نوشته شدهاند، جای سینوس و منفی سینوس برعکس نوشته شده است.
حسین زبرجدی دانا
سلام؛
ماتریس اصلاح شد. ممنون از دقت شما.
از همراهی شما با مجله فرادرس سپاسگزاریم.
کیمیا
سلام من میخواهم یک ماتریس 3*3 را دوران بدهم. اگر یک ماتریس دوران 3*3 را اول بنویسم و بعد ماتریس مورد نظر که 3*3 است را بنویسم و ضرب کنم، مااتریس حاصل دوران یافته می شود؟ در مکانیک محیط های پیوسته احتیاج داریم که ماتریس 3*3 را دوران دهیم
میکائیل
برای پادساعتگرد منفی باید پشت sin ردیف اول باشه ……
سید سراج حمیدی
سلام.
متن بازبینی و اصلاح شد.
سپاس از همراهی و بازخوردتان.
مرتضی
مفید بود. ساده و قابل فهم. ممنونم
سيدعلي موسوي
توي بخش ابعاد بالاتر، علامت براي sin و منفي sin رو يه بار بر عکس نوشتيد براي دوران حول محور z
توي يه فرمول با يه فرمول ديگه علتمت بر عکس گذاشتيد.
اگه درست ميگم، تاييد کنيد
سید سراج حمیدی
سلام. فرمول اصلاح شد.
از همراهی و دقت نظر شما سپاسگزاریم.
شما در حال مطالعه نسخه آفلاین یکی از مطالب «مجله فرادرس» هستید. لطفاً توجه داشته باشید، ممکن است برخی از قابلیتهای تعاملی مطالب، مانند امکان پاسخ به پرسشهای چهار گزینهای و مشاهده جواب صحیح آنها، نمایش نتیجه آزمونها، پاسخ تشریحی سوالات، پخش فایلهای صوتی و تصویری و غیره، در این نسخه در دسترس نباشند. برای دسترسی به نسخه آنلاین مطلب، استفاده از کلیه امکانات آن و داشتن تجربه کاربری بهتر اینجا کلیک کنید.






















فقط شرط یکه متعامد سطرها یا ستون های برای متعامد بودن ماتریس کافی نیست؟ یا باید هم سطر ها و هم ستون ها یکه متعامد باشند؟
با عرض سلام و تشکر از وبلاگ خوبتان،
خواهشمندم به دو سوال زیر پاسخ دهید:
سوال اول : در ریاضی، اگر بخواهیم نقطه ی A به مختصات A.X و A.Y را حول نقطه ی B به مختصات B.X و B.Y با زاویه theta دوران دهیم، نقطه ی به دست آمده C خواهد بود.
مطلوب است: C.X و C.Y
سوال دوم: راه حل همین سوال در برنامه نویسی سی شارپ یا پایتون چه طور خواهد بود؟
سلام و وقت بخیر
در قسمت آخر که ماتریسهای دوران حول محورهای x،y،z نوشته شدهاند، جای سینوس و منفی سینوس برعکس نوشته شده است.
سلام؛
ماتریس اصلاح شد. ممنون از دقت شما.
از همراهی شما با مجله فرادرس سپاسگزاریم.
سلام من میخواهم یک ماتریس 3*3 را دوران بدهم. اگر یک ماتریس دوران 3*3 را اول بنویسم و بعد ماتریس مورد نظر که 3*3 است را بنویسم و ضرب کنم، مااتریس حاصل دوران یافته می شود؟ در مکانیک محیط های پیوسته احتیاج داریم که ماتریس 3*3 را دوران دهیم
برای پادساعتگرد منفی باید پشت sin ردیف اول باشه ……
سلام.
متن بازبینی و اصلاح شد.
سپاس از همراهی و بازخوردتان.
مفید بود. ساده و قابل فهم. ممنونم
توي بخش ابعاد بالاتر، علامت براي sin و منفي sin رو يه بار بر عکس نوشتيد براي دوران حول محور z
توي يه فرمول با يه فرمول ديگه علتمت بر عکس گذاشتيد.
اگه درست ميگم، تاييد کنيد
سلام. فرمول اصلاح شد.
از همراهی و دقت نظر شما سپاسگزاریم.
تشکر فراوان از زحمات شما
خیلی ممنون.