شما در حال مطالعه نسخه آفلاین یکی از مطالب «مجله فرادرس» هستید. لطفاً توجه داشته باشید، ممکن است برخی از قابلیتهای تعاملی مطالب، مانند امکان پاسخ به پرسشهای چهار گزینهای و مشاهده جواب صحیح آنها، نمایش نتیجه آزمونها، پاسخ تشریحی سوالات، پخش فایلهای صوتی و تصویری و غیره، در این نسخه در دسترس نباشند. برای دسترسی به نسخه آنلاین مطلب، استفاده از کلیه امکانات آن و داشتن تجربه کاربری بهتر اینجا کلیک کنید.
در مطالب گذشته وبلاگ فرادرس در مورد ماتریسها و نحوه انجام عملیاتهایی روی آنها همچون ضرب یا معکوس کردنشان صحبت کردیم. اما یکی از کاربردهای ماتریس، استفاده از آن بهمنظور انجام تبدیلات هندسی است. از این رو در این مطلب قصد داریم تا ماتریس تبدیل را توضیح داده و مثالهایی نیز از آن ارائه دهیم.
در جبر خطی، تبدیل خطی را میتوان با استفاده از ماتریسهایی بیان کرد. اگر T، ماتریسی خطی از فضای Rn به فضای Rm و x برداری ستونی باشد، در این صورت ماتریس تبدیل A بهصورت زیر تعریف میشود.
بهمنظور بدست آوردن تبدیلی خطی، در ابتدا شکل جبری آن را بهصورت T(x) در نظر بگیرید. برای بدست آوردن ماتریس تبدیلِ A، تبدیل T روی هریک از پایههای e اعمال میشود. به عبارتی دیگر ماتریس تبدیل A را میتوان بهصورت زیر نیز بیان کرد:
A=[T(e1)T(e2)⋯T(en)]
برای نمونه تبدیل خطی T(x)=5x را در نظر بگیرید. با اعمال فرآیند فوق، ماتریسِ تبدیل A برابر میشود با:
T(x)=5x=5Ix=[5005]x
در حقیقت ماتریس فوق طول هر بردار را 5 برابر میکند. توجه داشته باشید که شکل ماتریسی بردارها وابسته به پایههای انتخاب شده است. بهمنظور توضیح بیشتر مجموعه بردارهایی پایهای را بهصورت زیر در نظر بگیرید.
E=[e1e2…en]
همچنین متغیرهای توصیف کننده فضای nبعدی را نیز بهصورت زیر در نظر بگیرید.
[v]E=[v1v2…vn]T
در این صورت بردارv را میتوان بهصورت زیر بیان کرد:
v=v1e1+v2e2+…+vnen=∑viei=E[v]E
حال ماتریس تبدیل A را میتوان با استفاده از پایههای برداری v، مطابق با روش زیر بیان کرد:
در بالا روش کلی بدست آوردن مولفههای یک ماتریس تبدیل توضیح داده شد. اما ماتریسهای تبدیل معروفی وجود دارند که معمولا شما با آنها مواجه خواهید شد. از این رو در ادامه مهمترین ماتریسهای تبدیل معرفی شدهاند.
انبساط
یکی از ماتریسهای پرکاربرد در علوم رایانه و البته ریاضی، ماتریسی است که یک بردار یا یک شکل خاص را در راستایی مشخص منبسط میکند.
مشخصه چنین تبدیلی، جهت کشش و اندازه آن است. در این قسمت ماتریس کشش را در دو راستا بیان خواهیم کرد. ماتریس کشش در راستای محور x به اندازه k برابر است با:
[k001]
به همین صورت ماتریس کشش در راستای y نیز بهصورت زیر قابل بیان است.
[100k]
انقباض
ماتریس انقباض با معکوس کردن درایههای ماتریس انبساط بدست میآید. برای نمونه ماتریس تبدیل ارائه شده در زیر، طول را در راستای x کشیده و عرضِ y را منقبض میکند.
[k001/k]
در حقیقت اگر مستطیلی را با استفاده از تبدیل فوق، تغییر دهیم، در این صورت مساحت آن ثابت خواهد ماند. توجه داشته باشید که ماتریسهای انقباض یا انبساط را تجانس نیز مینامند.
دوران
ماتریس دوران، نیز ماتریسی است که با استفاده از آن میتوان اشکال هندسی با معادلات به نسبت پیچیدهتر را دوران داده و شکل استاندارد آنها را بدست آورد. اگر معادله شکلی را به اندازه θ دوران دهیم، در این صورت مختصات جدید بهصورت x′ و y′ در میآید.
x′y′=xcosθ+ysinθ=−xsinθ+ycosθ
بنابراین ماتریس دوران مرتبط با این دو معادله برابر است با:
[x′y′]=[cosθ−sinθsinθcosθ][xy]
به همین صورت ماتریس دوران که اشکال را به صورت پادساعتگرد دوران میدهد نیز برابر میشود با:
[x′y′]=[cosθsinθ−sinθcosθ][xy]
توجه داشته باشید که در ماتریسهای فوق، جهت مثبت محور x به سمت راست و جهت مثبت محور y نیز به سمت بالا در نظر گرفته شدهاند.
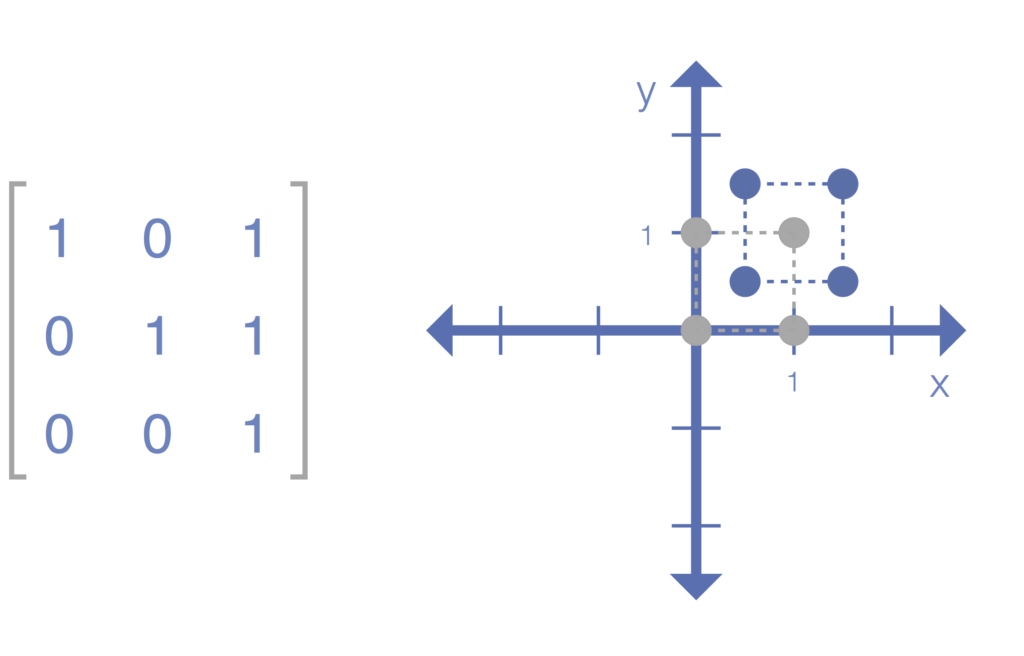
نگاشت برشی
بهمنظور انجام نگاشت برشی، دو روش وجود دارد. در حقیقت نگاشت برشی نسبت به x، با استفاده از دو معادله زیر قابل بیان است:
x′=x+ky y′=y
بههمین صورت نگاشت برشی نسبت به محور y نیز با استفاده از دو رابطه زیر بدست میآید.
x′=x y′=y+kx
بنابراین ماتریسهای برش نیز بهترتیب نسبت به محورهای x و y برابرند با:
[x′y′]=[10k1][xy]
[x′y′]=[1k01][xy]
در شکل زیر نمونهای از تبدیل برشی نسبت به محور x نشان داده شده است.
انعکاس
نوعی دیگر از ماتریسهای تبدیل، ماتریس انعکاس است. در ابتدا خطی را در قالب یک بردار بهصورت زیر در نظر بگیرید.
در این صورت ماتریس تبدیل به منظور انجام تبدیل مطابق با ماتریس زیر بدست میآید.
A=∥l∥21[lx2−ly22lxly2lxlyly2−lx2]
در شکل زیر نیز نمونهای از انعکاس نشان داده شده است.
تصویر در راستای عمود
بهمنظور تصویر کردن یک تابع روی خطی که از مرکز عبور میکند، در ابتدا بردار u=(ux,uy) را به عنوان برداری در نظر بگیرید که در راستای خطی است که قصد داریم تا یک منحنی را روی آن تصویر کنیم. در این صورت با استفاده از ماتریس زیر میتوان این تبدیل را انجام داد.
A=∥u∥21[ux2uxuyuxuyuy2]
در ادامه دو مثالی ارائه شده که بهمنظور درک بهتر پیشنهاد میشود آن را مطالعه فرمایید. همچنین مثالهایی از تبدیلات مختلف و نحوه انتقال آنها در شکل زیر نشان داده شده است.
مثال
دو بردار را در نظر بگیرید که بهصورت دو ستون در ماتریس C قرار گرفتهاند.
[–123–2]
بهمنظور قرینه کردن بردارها کافی است ماتریس تبدیل مربوط به آن را در ماتریس C ضرب کرد. ماتریس قرینه نسبت به محور x بهصورت زیر است.
[−1001]
بنابراین با ضرب کردن این ماتریس در ماتریسِ C، دو بردار قرینه برابر میشوند با:
در مطالب آینده هریک از تبدیلات فوق را در مطلبی مجزا توضیح خواهیم داد. در صورت علاقهمندی به مباحث مرتبط در زمینه ریاضی، آموزشهای زیر نیز به شما پیشنهاد میشوند:
«مجید عوضزاده»، فارغ التحصیل مقطع کارشناسی ارشد رشته مهندسی مکانیک از دانشگاه تهران است. فیزیک، ریاضیات و مهندسی مکانیک از جمله مباحث مورد علاقه او هستند که در رابطه با آنها تولید محتوا میکند.
شما در حال مطالعه نسخه آفلاین یکی از مطالب «مجله فرادرس» هستید. لطفاً توجه داشته باشید، ممکن است برخی از قابلیتهای تعاملی مطالب، مانند امکان پاسخ به پرسشهای چهار گزینهای و مشاهده جواب صحیح آنها، نمایش نتیجه آزمونها، پاسخ تشریحی سوالات، پخش فایلهای صوتی و تصویری و غیره، در این نسخه در دسترس نباشند. برای دسترسی به نسخه آنلاین مطلب، استفاده از کلیه امکانات آن و داشتن تجربه کاربری بهتر اینجا کلیک کنید.