شما در حال مطالعه نسخه آفلاین یکی از مطالب «مجله فرادرس» هستید. لطفاً توجه داشته باشید، ممکن است برخی از قابلیتهای تعاملی مطالب، مانند امکان پاسخ به پرسشهای چهار گزینهای و مشاهده جواب صحیح آنها، نمایش نتیجه آزمونها، پاسخ تشریحی سوالات، پخش فایلهای صوتی و تصویری و غیره، در این نسخه در دسترس نباشند. برای دسترسی به نسخه آنلاین مطلب، استفاده از کلیه امکانات آن و داشتن تجربه کاربری بهتر اینجا کلیک کنید.
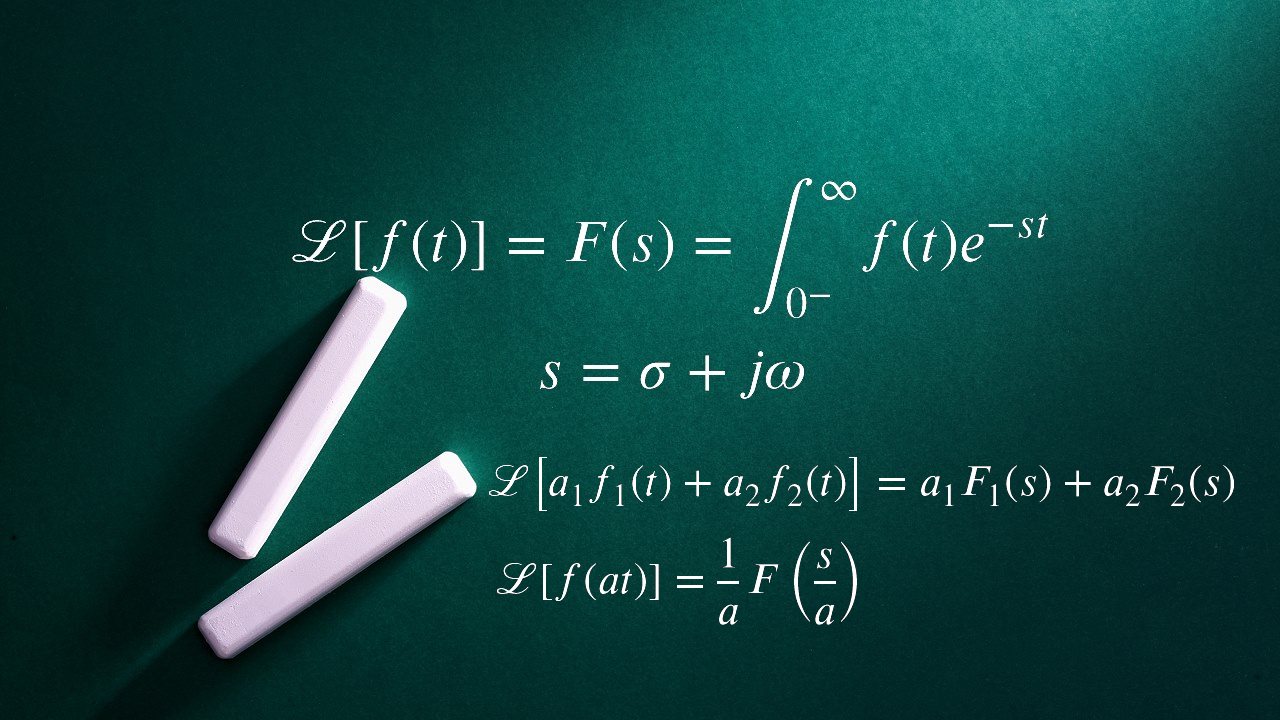
که در آن، s یک متغیر مختلط است و به صورت زیر تعریف میشود:
معادله (۲)
در معادله (۱)، آرگومان st در توان نمایی e، بدون بعد است. بنابراین، واحد s معادل معکوس واحد زمان (s−1) یا فرکانس است.
حد پایین انتگرال در معادله (۱)، با نماد 0− نشان داده میشود. این علامت، نمایانگر لحظهای قبل از زمان صفر (t=0) است. در تبدیل لاپلاس، از این نماد در حد پایین انتگرال استفاده میشود تا رفتار و هر نوع ناپیوستگی تابع f(t) در زمان صفر (t=0) در نظر گرفته شود.
انتگرال معادله (۱) نسبت به زمان، یک انتگرال معین است. بنابراین، مقدار این انتگرال نسبت به زمان مستقل و تابعی از متغیر s است.
معادله (۱)، مفهوم کلی تبدیل لاپلاس را منتقل میکند. در این معادله، تابع f(t) به تابع F(s) تبدیل میشود. f(t) تابعی از زمان (t) و F(s) تابعی از فرکانس مختلط (s) است. بنابراین این تبدیل، توابع در حوزه t را به توابع در حوزه s نگاشت میکند.
اگر s معادل فرکانس در نظر گرفته شود، تعریف زیر برای تبدیل لاپلاس معتبر خواهد بود:
تعریف: تبدیل لاپلاس، یک تبدیل انتگرالی از تابع f(t) در حوزه زمان به تابع F(s) در حوزه فرکانس مختلط است.
از تبدیل لاپلاس در تحلیل مدار نیز استفاده میشود. در این حالت، معادلات دیفرانسیلیِ نمایانگر مشخصات مدار، در حوزه زمان هستند. به عبارت دیگر، عبارتهای دیفرانسیلی مدار در حوزه زمان و با تابع f(t) تعریف میشوند. تبدیل لاپلاس آن یعنی تابع F(s)، نمایانگر معادلات جبری مدار در حوزه فرکانس است.
در معادله (۱) فرض شده است که تابع f(t) در t<0 برابر صفر است. برای اینکه این رفتار تضمین شود، معمولا تابع اصلی در تابع پله ضرب میشود. بنابراین تابع f(t) به صورت f(t)u(t) نوشته میشود که در آن t≥0 است.
تبدیل لاپلاس معادله (۱)، «تبدیل لاپلاس یکطرفه» (One-Sided Laplace Transform) نامیده میشود.
«تبدیل لاپلاس دوطرفه» (Double-Sided Laplace Transform) به صورت زیر تعریف میشود:
معادله (۳)
تبدیل لاپلاس یکطرفه که در معادله (۱) بیان شد، برای اهداف این آموزش کافی است. در ادامه مطلب نیز از این نوع تبدیل لاپلاس استفاده میشود.
همگرایی تبدیل لاپلاس
ممکن است تابع f(t) تبدیل لاپلاس نداشته باشد. برای آنکه تابع f(t) تبدیل لاپلاس داشته باشد، انتگرال معادله (۱) باید به یک مقدار محدود همگرا شود.
برای هر مقدار از t، رابطه ∣ejωt=1∣ برقرار است. بنابراین انتگرال معادله (۱) هنگامی همگرا میشود که رابطه زیر برقرار باشد:
معادله (۴)
اگر انتگرال معادله بالا همگرا باشد، σ=σc یک مقدار حقیقی خواهد بود. بنابراین، ناحیه همگرایی برای تبدیل لاپلاس، به صورت Re(s)=σ>σc تعریف میشود. در ناحیه همگرایی، ∣F(s)∣<∞ است و F(s) یک مقدار حقیقی دارد. تبدیل لاپلاس، در خارج از ناحیه همگرایی، تعریف نشده است. در شکل زیر، ناحیه همگرایی تبدیل لاپلاس نشان داده شده است:
شکل (۱)
خوشبختانه همه توابعی که در تحلیل مدار به کار گرفته میشوند، شرایط همگرایی بیان شده در معادله (۴) را برآورده میکنند و تبدیل لاپلاس دارند. در مقابل تبدیلِ لاپلاس مستقیم، تبدیل لاپلاس معکوس وجود دارد و به صورت زیر تعریف میشود:
معادله (۵)
فرض کنید که در معادله (۵)، انتگرال روی یک خط مستقیم و در ناحیه همگرایی تبدیل لاپلاس (σ>σc)، گرفته میشود. استفاده مستقیم از معادله (۵)، به دانشی فراتر از حد این آموزش نیاز دارد. به همین دلیل، از این معادله برای یافتن معکوس تبدیل لاپلاس استفاده نمیشود. در این حالت بهتر است از یک جدول برای یافتن معکوس تبدیل لاپلاس استفاده شود.
توابع f(t) و F(s)، جفت توابع تبدیل لاپلاس هستند. یعنی:
معادله (۶)
بنابراین یک تناظر یک به یک بین توابع f(t) و F(s) وجود دارد.
در ادامه با بیان چند مثال، به یافتن تبدیل لاپلاس توابع مهم خواهیم پرداخت.
مثال 1
تبدیل لاپلاس را برای هریک از توابع شکل زیر بیابید:
شکل (۲)
الف) u(t)
حل: تابع پله واحد یا u(t) در شکل (۲) نشان داده شده است. تبدیل لاپلاس این تابع به صورت زیر است:
حل: تابع نمایی واحد در شکل (۲) نشان داده شده است. تبدیل لاپلاس این تابع، به صورت زیر است:
معادله (۸)
پ) δ(t)
حل: تابع ضربه واحد نیز در شکل (۲) نشان داده شده است. این تابع در هر نقطهای به غیر از صفر، مقدار صفر دارد. اگر بازه انتگرالگیری نقطه صفر را شامل شود، انتگرال تابع ضربه مقداری برابر با یک خواهد داشت. پس:
حال که با تابع لاپلاس بیشتر آشنا شدید، به بررسی خواص تبدیل لاپلاس خواهیم پرداخت.
خواص تبدیل لاپلاس
در برخی مسائل، استفاده از انتگرال معادله (۱) برای محاسبه تبدیل لاپلاس لازم نیست. به جای آن کافی است خواص این تبدیل را بدانیم تا به حل مسائل مربوط به تبدیل لاپلاس بپردازیم. در ادامه، چند خاصیت مهم تبدیل لاپلاس مورد بررسی قرار میگیرد.
اگر توابع F1(s) و F2(s) به ترتیب تبدیل لاپلاس توابع f1(t) و f2(t) باشند، داریم:
معادله (۱۰)
که در آن، a1 و a2 اعدادی ثابت هستند.
معادله (10)، «خاصیت خطی بودن» (Linearity) تبدیل لاپلاس را بیان میکند. به عنوان یک مثال میتوان نوشت:
معادله (۱۱)
طبق قسمت دوم مثال 1، میدانیم که تبدیل لاپلاس تابع نمایی به صورت زیر نوشته میشود:
بنابراین تبدیل لاپلاس تابع کسینوسی برابر است با:
معادله (۱۲)
تغییر مقیاس زمانی
فرض کنید که F(s)، تبدیل لاپلاس تابع f(t) است. تبدیل لاپلاس تابع f(at) به صورت زیر نوشته میشود:
که در آن، a یک عدد ثابت و بزرگتر از صفر است. حال تغییر متغیر زیر را در نظر بگیرید:
x=at→dx=adt
در این حالت داریم:
اگر در معادله (۱)، جای s با s/a و متغیر t با x عوض شود، به همان تعریف اولیه تبدیل لاپلاس میرسیم. بنابراین «خاصیت تغییر مقیاس زمانی» (Scaling Property) به صورت زیر تعریف میشود:
معادله (۱۳)
با توجه به مثال ۱، میدانیم که تبدیل لاپلاس تابع سینوسی به صورت زیر است:
با استفاده از خاصیت تغییر مقیاس زمانی، تبدیل لاپلاس تابع سینوسی با آرگومان دو برابر، به صورت زیر خواهد بود:
جابجایی زمانی (شیفت زمانی)
فرض کنید که F(s)، تبدیل لاپلاس تابع f(t) است. تبدیل لاپلاس تابع دارای تأخیر زمانی به صورت زیر است:
طبق تعریف تابع پله واحد، میدانیم:
u(t−a)={0,1,t<at≥a
بنابراین داریم:
تغییر متغیر زیر را در نظر بگیرید:
x=t−a
پس داریم:
dx=dt,t=x+a
هنگامی که t→a میل میکند، x→0 میل خواهد کرد. اگر t→∞ میل کند، آنگاه x→∞ میل خواهد کرد. به این ترتیب با تغییر متغیر انجام شده، حدود انتگرالگیری نیز تغییر میکند. بنابراین:
معادله بالا را به صورت زیر نیز میتوان نوشت:
معادله (۱۴)
به عبارت دیگر، اگر یک تابع در حوزه زمان به اندازه عدد ثابت a تأخیر یابد، تبدیل لاپلاس تابع اولیه در e−as ضرب میشود. به این خاصیت، «تأخیر زمانی» (Time-Delay) یا «جابجایی زمانی» (Time-Shift) در تبدیل لاپلاس گفته میشود.
به عنوان مثال، از معادله (۱۲) میدانیم که:
با استفاده از خاصیت جابجایی زمانی خواهیم داشت:
جابجایی فرکانسی
فرض کنید که F(s)، تبدیل لاپلاس تابع f(t) است. اگر تابع در حوزه زمان در یک تابع نمایی ضرب شود، داریم:
یا میتوان نوشت:
معادله (۱۵)
به عبارت دیگر اگر تابع f(t) در حوزه زمان در یک تابع نمایی ضرب شود، با یک تغییر متغیر در s میتوان به تبدیل لاپلاس تابع رسید. این خاصیت، «جابجایی فرکانسی» (Frequency Shift) یا «انتقال فرکانسی» (Frequency Translation) نام دارد.
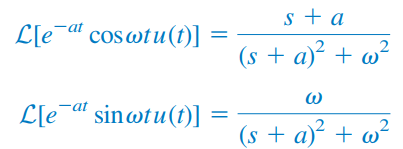
میدانیم که تبدیل لاپلاس توابع سینوسی و کسینوسی، به صورت زیر به دست میآید:
با استفاده از خاصیت جابجایی فرکانسی که در معادله (۱۵) گفته شد، تبدیل لاپلاس توابع سینوسی و کسینوسی میرا به صورت زیر به دست میآید:
مشتق زمانی
فرض کنید که F(s)، تبدیل لاپلاس تابع f(t) است. تبدیل لاپلاس مشتق تابع به صورت زیر است:
ابتدا تغییر متغیرهای زیر را در نظر میگیریم:
u=e−st,du=−se−stdt dv=(df/dt)dt,v=f(t)
با توجه به این تغییر متغیرها، انتگرالگیری جزء به جزء به صورت زیر انجام میشود:
بنابراین، خاصیت «مشتق زمانی» (Time Differentiation) به صورت زیر تعریف میشود:
معادله (۱۶)
تبدیل لاپلاس مشتق دوم تابع f(t) با تکرار معادله (۱۶) قابل محاسبه است:
یا به عبارت سادهتر:
معادله (۱۷)
به همین ترتیب، تبدیل لاپلاس مشتق nام تابع f(t) به صورت زیر است:
معادله (۱۸)
میدانیم که مشتق یک تابع سینوسی، تابعی کسینوسی است. به عنوان یک مثال، میتوان از معادله (16) استفاده کرد تا تبدیل لاپلاس تابع کسینوسی را یافت. اگر f(t)=cosωtu(t) باشد، آنگاه f(0)=1 است. از طرفی میدانیم:
f′(t)=−ωsinωtu(t)
بنابراین طبق خاصیت مقیاسبندی زمانی، تبدیل لاپلاس مشتق تابع کسینوسی به صورت زیر خواهد بود:
که این معادله همان رابطه تبدیل لاپلاس تابع سینوسی است.
انتگرال زمانی
فرض کنید که F(s)، تبدیل لاپلاس تابع f(t) است. تبدیل لاپلاس انتگرال تابع به صورت زیر است:
معادله (۱۹)
تغییر متغیرهای زیر را در نظر بگیرید:
و همچنین:
با انتگرالگیری جزء به جزء خواهیم داشت:
معادله (۲۰)
عبارت اول سمت راست معادله (۲۰)، برای t=∞ مقداری برابر صفر دارد، زیرا تابع e−s∞ برابر صفر است. همچنین در t=0 این عبارت برابر است با:
s1∫00f(x)dx=0
میتوان نتیجه گرفت که عبارت اول سمت راست معادله (۲۰) برابر صفر است. پس تبدیل لاپلاس برای انتگرال تابع به صورت زیر است:
بنابراین، خاصیت «انتگرال زمانی» (Time integration) به صورت زیر تعریف میشود:
معادله (۲۱)
طبق مثال ۱، اگر f(t) برابر با تابع پله واحد (u(t)) باشد، داریم:
F(s)=s1
با استفاده از معادله (۲۱) خواهیم داشت:
پس تبدیل لاپلاس «تابع شیب» (Ramp Function) (f(t)=t) به صورت زیر خواهد بود:
معادله (۲۲)
با اعمال دوباره معادله (۲۱) خواهیم داشت:
یا به صورت سادهتر داریم:
معادله (۲۳)
با تکرار اعمال معادله (۲۱)، به نتیجه زیر میرسیم:
به طور مشابه، با استفاده از انتگرالگیری جزء به جزء میتوان نشان داد که:
معادله (۲۴)
که در آن:
مشتق فرکانسی
فرض کنید که F(s)، تبدیل لاپلاس تابع f(t) است. داریم:
با مشتقگیری از دو طرف تابع نسبت به s خواهیم داشت:
به این ترتیب خاصیت «مشتق فرکانسی» (Frequency Differentiation) به صورت زیر تعریف میشود:
معادله (۲۵)
با تکرار اعمال این معادله خواهیم داشت:
معادله (۲۶)
برای مثال، از معادله (۷) میدانیم که:
L[e−at]=(s+a)1
با استفاده از خاصیت مشتق فرکانسی خواهیم داشت:
معادله (۲۷)
اگر a در معادله (۲۷) برابر صفر باشد، به معادله زیر میرسیم:
L[t]=s21
که با معادله (۲۲) یکسان است. اگر از معادله (۲۶) استفاده شود، به معادله (۲۳) خواهیم رسید.
تناوب زمانی
فرض کنید f(t)، یک تابع متناوب مانند شکل زیر باشد:
شکل (۳)
این تابع را میتوان به صورت جمع سه تابع دارای جابجایی زمان، نمایش داد. به صورت زیر:
شکل (۴)
بیان ریاضی شکل (۴) به صورت زیر است:
معادله (۲۸)
اگر تابع f(t) فقط در بازه 0 در نظر گرفته شود، تابع f1(t) حاصل میشود. یعنی داریم:
یا به صورت سادهتر:
از دو طرف معادله (۲۸) تبدیل لاپلاس گرفته میشود. با اعمال خاصیت جابجایی زمانی که در معادله (۱۴) بیان شد، خواهیم داشت:
معادله (۲۹)
اما میدانیم:
اگر ∣x∣<1 باشد، معادله (۲۹) تبدیل به معادله زیر میشود:
معادله (۳۰)
که در آن، F1(s) تبدیل لاپلاس تابع f1(t) است. به عبارت دیگر، F1(s) تبدیل لاپلاس تابع f(t) در تناوب اول است. معادله (۳۰) نشان میدهد که تبدیل لاپلاس یک تابع متناوب، از تقسیم تبدیل لاپلاس تناوب اول آن بر 1−e−Ts به دست میآید. این معادله خاصیت «تناوب زمانی» (Time Periodicity) تبدیل لاپلاس را نشان میدهد.
مقدار اولیه و نهایی
با استفاده از مشخصات مقدار اولیه و مقدار نهایی، میتوان مقدار اولیه تابع یعنی f(0) و مقدار نهایی تابع یعنی f(∞) را برای f(t) مستقیما از تبدیل لاپلاس F(s) محاسبه کرد. برای یافتن این مقادیر، از خاصیت مشتق زمانی شروع میکنیم. داریم:
معادله (۳۱)
در معادله (۳۱) فرض کنید که s→∞ میل میکند. در این حالت، عبارت زیر انتگرال معادله، یک تابع نمایی میراشونده خواهد بود. بنابراین مقدار انتگرال صفر میشود. به این ترتیب، معادله (۳۱) به صورت زیر نوشته میشود:
معادله (۳۲)
از آنجا که f(0) مستقل از s است، میتوان نوشت:
معادله (۳۳)
معادله (۳۳) به «قضیه مقدار اولیه» (initial-value theorem) مشهور است. برای مثال، تبدیل لاپلاس تابع کسینوسی میراشونده زیر را در نظر بگیرید:
معادله (۳۴)
با استفاده از قضیه مقدار اولیه داریم:
اگر t=0 باشد، طبق معادله (۳۴)، f(t)=1 است. بنابراین مقدار اولیه به دست آمده برای تابع f(t)، درست است.
در معادله (۳۱)، اگر s→0 میل کند، خواهیم داشت:
یا به صورت سادهتر:
معادله (۳۵)
معادله (۳۵) به نام «قضیه مقدار نهایی» (Final Value Problem) شناخته میشود. این قضیه فقط هنگامی معتبر است که همه قطبهای تابع F(s)، سمت چپ صفحه s قرار گیرند. بنابراین همه قطبها، باید قسمت حقیقی منفی داشته باشند.
به عنوان یک مثال تابع زیر و تبدیل لاپلاس آن را در نظر بگیرید:
با اعمال قضیه مقدار نهایی خواهیم داشت:
با توجه به معادله (۳۵) انتظار میرفت که مقدار نهایی تابع، برابر صفر باشد. زیرا در این حالت یک تابع متناوب و یک تابع نمایی میراشونده در هم ضرب شدهاند.
به عنوان مثالی دیگر، تابع زیر و تبدیل لاپلاس آن را در نظر بگیرید:
بنابراین:
مقدار نهایی به دست آمده، صحیح نیست. زیرا تابع سینوسی، بین دو مقدار مثبت و منفی یک در نوسان است و در t→∞، حد ندارد. پس نمیتوان از قضیه مقدار نهایی برای محاسبه مقدار نهایی تابع f(t)=sint استفاده کرد، زیرا تابع F(s) دو قطب در نقاط s=±j دارد. این نقاط در نیمه چپ صفحه s قرار ندارند.
به طور کلی، قضیه مقدار نهایی برای محاسبه توابع سینوسی به کار نمیروند. این توابع تا بینهایت نوسان میکنند و مقدار نهایی ندارند.
قضایای مقدار اولیه و مقدار نهایی، رابطه بین نقطه مبدأ و بینهایت را در حوزههای زمان و s نشان میدهد. از این قضایا، میتوان برای بررسی مجدد درستی تبدیل لاپلاس استفاده کرد.
در شکل زیر، یک جدول از تبدیل لاپلاس توابع مشهور و خواص این تبدیل آورده شده است:
فیلم های آموزش خواص تبدیل لاپلاس – به زبان ساده (+ دانلود فیلم آموزش رایگان)
۷ دیدگاه برای «خواص تبدیل لاپلاس – به زبان ساده (+ دانلود فیلم آموزش رایگان)»
آذش
سلام به شدت عالی بود اما فکر کنم یک اشتباه املایی وجود دارد برای مثال مشتق زمانی آخرش به جای تبدیل لاپلاس گفته شده تبدیل فوریه در حالی که تبدیل فوریه یک مبحث جداست.
حسین زبرجدی دانا
با سلام و وقت بخیر؛
متن اصلاح شد. ممنون از توجه شما.
از همراهی شما با مجله فرادرس سپاسگزاریم
محمد حسین
سپاس از شما
Ali.R
عالی و ممنون
Ali.R
عالی
pouria
در معادله (۱)، آرگومان
s
t
در توان نمایی
e
، بدون بعد است. بنابراین، واحد
s
معادل معکوس واحد زمان (
s
−
1
) یا فرکانس است..چرا باید توان نپر در تبدیل لاپلاس بی بعد باشه؟
سید سراج حمیدی
سلام.
آنچه بیان شده، طبق تعریف تبدیل لاپلاس بوده است. از آنجا که واحد زمان و فرکانس عکس هم هستند، حاصلضرب آنها برابر با یک میشود.
از همراهی شما سپاسگزاریم.
شما در حال مطالعه نسخه آفلاین یکی از مطالب «مجله فرادرس» هستید. لطفاً توجه داشته باشید، ممکن است برخی از قابلیتهای تعاملی مطالب، مانند امکان پاسخ به پرسشهای چهار گزینهای و مشاهده جواب صحیح آنها، نمایش نتیجه آزمونها، پاسخ تشریحی سوالات، پخش فایلهای صوتی و تصویری و غیره، در این نسخه در دسترس نباشند. برای دسترسی به نسخه آنلاین مطلب، استفاده از کلیه امکانات آن و داشتن تجربه کاربری بهتر اینجا کلیک کنید.
































































































سلام به شدت عالی بود اما فکر کنم یک اشتباه املایی وجود دارد برای مثال مشتق زمانی آخرش به جای تبدیل لاپلاس گفته شده تبدیل فوریه در حالی که تبدیل فوریه یک مبحث جداست.
با سلام و وقت بخیر؛
متن اصلاح شد. ممنون از توجه شما.
از همراهی شما با مجله فرادرس سپاسگزاریم
سپاس از شما
عالی و ممنون
عالی
در معادله (۱)، آرگومان
s
t
در توان نمایی
e
، بدون بعد است. بنابراین، واحد
s
معادل معکوس واحد زمان (
s
−
1
) یا فرکانس است..چرا باید توان نپر در تبدیل لاپلاس بی بعد باشه؟
سلام.
آنچه بیان شده، طبق تعریف تبدیل لاپلاس بوده است. از آنجا که واحد زمان و فرکانس عکس هم هستند، حاصلضرب آنها برابر با یک میشود.
از همراهی شما سپاسگزاریم.