شما در حال مطالعه نسخه آفلاین یکی از مطالب «مجله فرادرس» هستید. لطفاً توجه داشته باشید، ممکن است برخی از قابلیتهای تعاملی مطالب، مانند امکان پاسخ به پرسشهای چهار گزینهای و مشاهده جواب صحیح آنها، نمایش نتیجه آزمونها، پاسخ تشریحی سوالات، پخش فایلهای صوتی و تصویری و غیره، در این نسخه در دسترس نباشند. برای دسترسی به نسخه آنلاین مطلب، استفاده از کلیه امکانات آن و داشتن تجربه کاربری بهتر اینجا کلیک کنید.
انتگرال در مختصات استوانه ای – به زبان ساده (+ دانلود فیلم آموزش گام به گام)
۷۰۱۱
۱۴۰۲/۰۲/۱۳
۴۵ دقیقه
PDF
آموزش متنی جامع
آموزش ویدئویی
پیشتر در بلاگ فرادرس مفاهیم مربوط به مختصات استوانهای و انتگرال سه گانه معرفی شدند. حال میخواهیم مفهومی را معرفی کنیم که به نوعی ترکیبی از این مفاهیم محسوب میشود. در حقیقت هدف ما در این مطلب معرفی انتگرال در مختصات استوانه ای است.
همانطور که در پیشتر نیز بیان شد، مختصات استوانهای چیزی جز توسعه مختصات قطبی در سه بعد نیست. با استفاده از تبدیل زیر میتوان مختصات دکارتی و استوانهای را به یکدیگر تبدیل کرد.
به منظور محاسبه انتگرال در مختصات استوانهای بایستی در ابتدا دیفرانسیل حجم (dv) را در این مختصات بدست آوریم. در شکل زیر دیفرانسیل حجم در دستگاه استوانهای نشان داده شده است.
با توجه به شکل فوق دیفرانسیل حجم برابر است با:
dV=rdθdrdz
فرض کنید ناحیه انتگرالگیری بین دو تابع u1,u2 باشد؛ در این صورت ناحیه مذکور را میتوان به صورت زیر در مختصات استوانهای نوشت:
توجه داشته باشید که ناحیه توصیف شده بالا برای حالتی است که در آن تصویر E روی صفحه x-y قرار داشته باشد. در دیگر حالات کافی است از تبدیل ارائه شده در رابطه ۱ استفاده شود.
نهایتا حاصل انتگرال در مختصات استوانهای برابر است با:
توجه داشته باشید که تمامی xها و yها در رابطه فوق بایستی به r و θ تبدیل شوند. در ادامه مثالهایی مطرح شده که با استفاده از آنها میتوانید به موضوع مسلط شوید.
مثال ۱
حاصل انتگرال E∭ydV را در حالتی بیابید که E ناحیه بین دو استوانه x2+y2=1 و x2+y2=۴ در زیر صفحه z=x+2 و بالای صفحه x-y است.
با توجه به شکل فوق z در فاصله ۰ تا x+2 تغییر میکند. بنابراین بازه تغییرات z را میتوان بر حسب r و θ به صورت زیر بیان کرد.
0≤z≤x+2⇒0≤z≤rcosθ+2
نهایتا ناحیه D (تصویر E روی صفحه x-y) منطقهای بین دو دایره x2+y2=1 و x2+y2=۴ در زیر صفحه z=x+2 قرار میگیرد. در نتیجه بازه توصیف کننده این ناحیه به صورت زیر قابل ارائه است.
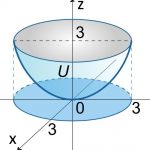
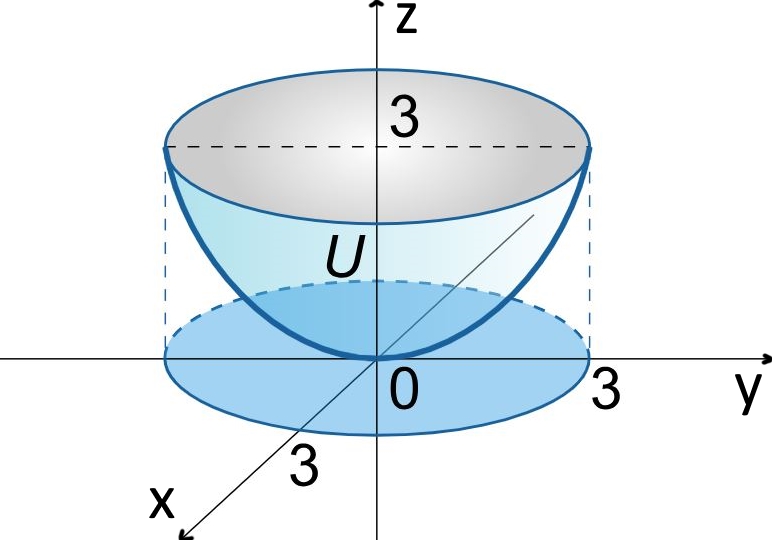
همانطور که در مطلب انتگرال سهگانه نیز عنوان شد، در هر حالتی که میخواهید پاسخ انتگرال سه گانه را محاسبه کنید، در ابتدا بایستی تصویری از ناحیه انتگرالگیری در ذهن خود داشته باشید. در این مثال نیز ناحیه انتگرالگیری در شکل زیر نشان داده شده است.
شکل ۱
با توجه به اینکه تصویر ناحیه انتگرالگیری روی صفحه x-y است، بنابراین در ابتدا بایستی انتگرال را نسبت به z محاسبه کرد. بدیهی است که ناحیه انتگرالگیری بین دو سطح قهوهای رنگ و آبی رنگ تغییر میکند. لذا بازه تغییرات z را میتوان بهصورت زیر در نظر گرفت.
2x2+2y2−7≤z≤1
D ناحیهای دیسکی شکل بوده که از تقاطع دو سطح z=1 و z=2x2+2y2−7 بدست میآید. بنابراین معادله سطح D را میتوان به صورت زیر بدست آورد.
2x2+2y2−7=1→2x2+2y2=8→x2+y2=4
در نتیجه D ناحیهای دیسکی شکل بوده که در بازه x2+y2≤4 قرار گرفته و میتوان از مختصات استوانهای به منظور توصیف آن استفاده کرد. نهایتا بازه انتگرالگیری را میتوان به شکلی که در ادامه آمده بیان کرد:
0≤θ≤2π0≤r≤22r2−7≤z≤1
با استفاده از رابطه ۱، حاصل انتگرال سه گانه در مختصات استوانهای برابر میشود با:
در این مطلب نحوه محاسبه انتگرال سه گانه در دستگاه مختصات استوانهای توضیح داده شد. در آینده بدست آوردن این انتگرال را در دستگاه مختصات کروی توضیح خواهیم داد.
در صورت علاقهمندی به مباحث مرتبط در زمینه ریاضیات، آموزشهای زیر نیز به شما پیشنهاد میشوند:
«مجید عوضزاده»، فارغ التحصیل مقطع کارشناسی ارشد رشته مهندسی مکانیک از دانشگاه تهران است. فیزیک، ریاضیات و مهندسی مکانیک از جمله مباحث مورد علاقه او هستند که در رابطه با آنها تولید محتوا میکند.
شما در حال مطالعه نسخه آفلاین یکی از مطالب «مجله فرادرس» هستید. لطفاً توجه داشته باشید، ممکن است برخی از قابلیتهای تعاملی مطالب، مانند امکان پاسخ به پرسشهای چهار گزینهای و مشاهده جواب صحیح آنها، نمایش نتیجه آزمونها، پاسخ تشریحی سوالات، پخش فایلهای صوتی و تصویری و غیره، در این نسخه در دسترس نباشند. برای دسترسی به نسخه آنلاین مطلب، استفاده از کلیه امکانات آن و داشتن تجربه کاربری بهتر اینجا کلیک کنید.





















سلام
خیلی ممنون