در آموزشهای قبلی مجله فرادرس ، درباره انتگرال و روشهای محاسبه آن بحث کردیم. در این آموزشها، مباحثی مانند انتگرال توابع مثلثاتی ، انتگرالگیری جزء به جزء ، انتگرال دوگانه و انتگرال سهگانه را معرفی کردیم. همچنین با انتگرال خطی آشنا شدیم. انتگرال خطی در مباحث مختلف فیزیک کاربرد فراوانی دارد. در این آموزش، چند مورد از مهمترین کاربردهای انتگرال خطی در فیزیک را بررسی میکنیم.
محتوای این مطلب جهت یادگیری بهتر و سریعتر آن، در انتهای متن به صورت ویدیویی نیز ارائه شده است.
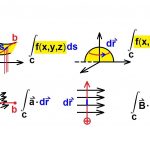
در فیزیک، از انتگرالهای خطی به ویژه برای محاسبه موارد زیر استفاده میشود:
در ادامه این کاربردها را با جزئیات بیشتر بررسی میکنیم.
جرم سیم
یک قطعه سیم را در فضای سهبعدی در نظر بگیرید که با منحنی C C C ρ ( x , y , z ) \rho \left( {x,y,z} \right) ρ ( x , y , z )
m = ∫ C ρ ( x , y , z ) d s . \large m = \int \limits _ C { \rho \left ( { x , y , z } \right ) d s } . m = C ∫ ρ ( x , y , z ) d s .
اگر منحنی C C C تابع برداری r ( t ) = ( x ( t ) , y ( t ) , z ( t ) ) \mathbf { r } \left ( t \right ) = \left ( { x \left ( t \right ) , y \left ( t \right ) , z \left ( t \right ) } \right ) r ( t ) = ( x ( t ) , y ( t ) , z ( t ) )
m = ∫ α β ρ ( x ( t ) , y ( t ) , z ( t ) ) ⋅ ( d x d t ) 2 + ( d y d t ) 2 + ( d z d t ) 2 d t \large { m \text { = } } \kern0pt { \int \limits _ \alpha ^ \beta { \rho \left ( { x \left ( t \right ) , y \left ( t \right ) , z \left ( t \right ) } \right ) \cdot } } \kern0pt { { \sqrt { { { \left ( { \frac { { d x } } { { d t } } } \right ) } ^ 2 } + { { \left ( { \frac { { d y } } { { d t } } } \right ) } ^ 2 } + { { \left ( { \frac { { d z } } { { d t } } } \right ) } ^ 2 } } d t } } m = α ∫ β ρ ( x ( t ) , y ( t ) , z ( t ) ) ⋅ ( d t d x ) 2 + ( d t d y ) 2 + ( d t d z ) 2 d t
اگر منحنی C C C x y xy x y
m = ∫ C ρ ( x , y ) d s \large m = \int \limits _ C { \rho \left ( { x , y } \right ) d s } m = C ∫ ρ ( x , y ) d s
یا به شکل پارامتریِ
m = ∫ α β ρ ( x ( t ) , y ( t ) ) ⋅ ( d x d t ) 2 + ( d y d t ) 2 d t . \large { m \text { = } } \kern0pt { \int \limits _ \alpha ^ \beta { \rho \left ( { x \left ( t \right ) , y \left ( t \right ) } \right ) \cdot } } \kern0pt { { \sqrt { { { \left ( { \frac { { d x } } { { d t } } } \right ) } ^ 2 } + { { \left ( { \frac { { d y } } { { d t } } } \right ) } ^ 2 } } d t } . } m = α ∫ β ρ ( x ( t ) , y ( t ) ) ⋅ ( d t d x ) 2 + ( d t d y ) 2 d t .
به دست خواهد آمد.
مرکز جرم و گشتاورهای لختی یک سیم
سیمی با تابع چگالی پیوسته ρ ( x , y , z ) \rho \left( {x,y,z} \right) ρ ( x , y , z ) C C C
x ˉ = M y z m , y ˉ = M x z m , z ˉ = M x y m \large { \bar x = \frac { { { M _ { y z } } } } { m } , \; \; \; } \kern0pt { \bar y = \frac { { { M _ { x z } } } } { m } , \; \; \; } \kern0pt { \bar z = \frac { { { M _ { x y } } } } { m } } x ˉ = m M yz , y ˉ = m M x z , z ˉ = m M x y
که در آن، عباراتِ
M y z = ∫ C x ρ ( x , y , z ) d s , M x z = ∫ C y ρ ( x , y , z ) d s , M x y = ∫ C z ρ ( x , y , z ) d s \large \begin{align*} { M _ { y z } } & = \int \limits _ C { x \rho \left ( { x , y , z } \right ) d s } , \; \; \; \kern-0.3pt \\ { M _ { x z } } & = \int \limits _ C { y \rho \left ( { x , y , z } \right ) d s } , \; \; \; \kern-0.3pt \\ { M _ { x y } } & = \int \limits _ C { z \rho \left ( { x , y , z } \right ) d s } \end {align*} M yz M x z M x y = C ∫ x ρ ( x , y , z ) d s , = C ∫ y ρ ( x , y , z ) d s , = C ∫ z ρ ( x , y , z ) d s
گشتاورهای اول نامیده میشوند.
گشتاورهای لختی حول محور x x x y y y z z z
I x = ∫ C ( y 2 + z 2 ) ρ ( x , y , z ) d s , I y = ∫ C ( x 2 + z 2 ) ρ ( x , y , z ) d s , I z = ∫ C ( x 2 + y 2 ) ρ ( x , y , z ) d s \large \begin{align*} { I _ x } & = \int \limits _ C { \left ( { { y ^ 2 } + { z ^ 2 } } \right ) \rho \left ( { x , y , z } \right ) d s } , \; \; \kern-0.3pt \\ { I _ y } & = \int \limits _ C { \left ( { { x ^ 2 } + { z ^ 2 } } \right ) \rho \left ( { x , y , z } \right ) d s } , \; \; \kern-0.3pt \\ { I _ z } &= \int \limits _ C { \left ( { { x ^ 2 } + { y ^ 2 } } \right ) \rho \left ( { x , y , z } \right ) d s } \end {align*} I x I y I z = C ∫ ( y 2 + z 2 ) ρ ( x , y , z ) d s , = C ∫ ( x 2 + z 2 ) ρ ( x , y , z ) d s , = C ∫ ( x 2 + y 2 ) ρ ( x , y , z ) d s
کار
کار انجام شده توسط نیروی F \mathbf{F} F C C C
W = ∫ C F ⋅ d r \large W = \int \limits _ C { \mathbf { F } \cdot d \mathbf { r } } W = C ∫ F ⋅ d r
که در آن، F \mathbf{F} F d r d\mathbf{r} d r F ⋅ d r {\mathbf{F} \cdot d\mathbf{r}} F ⋅ d r F \mathbf{F} F d r d\mathbf{r} d r
شکل ۱ توجه داشته باشید که میدان نیروی F \mathbf{F} F F \mathbf{F} F
اگر میدان برداری به شکل مختصاتیِ
F = ( P ( x , y , z ) , Q ( x , y , z ) , R ( x , y , z ) ) \large { \mathbf { F } \text { = } } \kern0pt { \left ( { P \left ( { x , y , z } \right ) , Q \left ( { x , y , z } \right ) , } \right . } \kern0pt { \left . { R \left ( { x , y , z } \right ) } \right ) } F = ( P ( x , y , z ) , Q ( x , y , z ) , R ( x , y , z ) )
تعریف شود، آنگاه کار انجام شده توسط این نیرو به صورت زیر محاسبه میشود:
W = ∫ C F ⋅ d r = ∫ C P d x + Q d y + R d z . \large { W = \int \limits _ C { \mathbf { F } \cdot d \mathbf { r } } } = { \int \limits _ C { P d x + Q d y + R d z } . } W = C ∫ F ⋅ d r = C ∫ P d x + Q d y + R d z .
اگر جسم در صغحه x y xy x y C C C
W = ∫ C F ⋅ d r = ∫ C P d x + Q d y \large { W = \int \limits _ C { \mathbf { F } \cdot d \mathbf { r } } } = { \int \limits _ C { P d x + Q d y } } W = C ∫ F ⋅ d r = C ∫ P d x + Q d y
که در آن، F = ( P ( x , y ) , Q ( x , y ) ) \mathbf { F } = \left ( { P \left ( { x , y } \right ) , Q \left ( { x , y } \right ) } \right ) F = ( P ( x , y ) , Q ( x , y ) )
اگر مسیر C C C t t t
W = ∫ α β [ P ( x ( t ) , y ( t ) , z ( t ) ) d x d t + Q ( x ( t ) , y ( t ) , z ( t ) ) d y d t + R ( x ( t ) , y ( t ) , z ( t ) ) d z d t ] d t \large \begin{align*} W & = \kern0pt { \int \limits _ \alpha ^ \beta { \left [ { P \left ( { x \left ( t \right ) , y \left ( t \right ) , z \left ( t \right ) } \right ) \frac { { d x } } { { d t } } } \right . } } + { { \left . { Q \left ( { x \left ( t \right ) , y \left ( t \right ) , z \left ( t \right ) } \right ) \frac { { d y } } { { d t } } } \right . } } \\ & \, \, \, \, \, \, \, \, + { { \left . { R \left ( { x \left ( t \right ) , y \left ( t \right ) , z \left ( t \right ) } \right ) \frac { { d z } }{ { d t } } } \right ] d t } } \end {align*} W = α ∫ β [ P ( x ( t ) , y ( t ) , z ( t ) ) d t d x + Q ( x ( t ) , y ( t ) , z ( t ) ) d t d y + R ( x ( t ) , y ( t ) , z ( t ) ) d t d z ] d t
که t t t α \alpha α β \beta β
اگر میدان برداری F \mathbf{F} F پایستار باشد، آنگاه کار انجام شده روی جسم متحرک از A A A B B B
W = u ( B ) – u ( A ) \large W = u \left ( B \right ) – u \left ( A \right ) W = u ( B ) – u ( A )
که u ( x , y , z ) u\left( {x,y,z} \right) u ( x , y , z )
قانون آمپر
انتگرال خطی میدان مغناطیسی B \mathbf{B} B C C C C C C
∫ C B ⋅ d r = μ 0 I \large \int \limits _ C { \mathbf { B } \cdot d \mathbf { r } } = { \mu _ 0 } I C ∫ B ⋅ d r = μ 0 I
شکل ۲ در اینجا μ 0 {\mu _0} μ 0 1.26 × 1 0 – 6 H/m 1.26 \times {10^{ – 6}}\,\text{H/m} 1.26 × 1 0 –6 H/m
قانون فارادی
نیروی محرکه الکتریکی القایی ε \varepsilon ε C C C ψ \psi ψ
ε = ∫ C E ⋅ d r = – d ψ d t . \large { \varepsilon = \int \limits _ C { \mathbf { E } \cdot d \mathbf { r } } } = { – \frac { { d \psi } } { { d t } } . } ε = C ∫ E ⋅ d r = – d t d ψ .
شکل ۳ مثالهای کاربرد انتگرال خطی در فیزیک
در ادامه، چند مثال را از کاربردهای انتگرال خطی در فیزیک بررسی میکنیم.
مثال ۱
جرم یک سیم را بیابید که در راستای منحنی مسطح C C C ρ ( x , y ) = 3 x + 2 y \rho \left( {x,y} \right) = 3x + 2y ρ ( x , y ) = 3 x + 2 y C C C A ( 1 , 1 ) A\left( {1,1} \right) A ( 1 , 1 ) B ( 2 , 4 ) B\left( {2,4} \right) B ( 2 , 4 )
حل: ابتدا معادله پارامتری خط A B AB A B
$$ \large \begin{align*}<br />
{ { \frac { { x – { x _A } } } { { { x _ B } – { x _ A } } } = \frac { { y – { y _ A } } } { { { y _ B } – { y _ A } } } } = { t , \; \; } } \Rightarrow<br />
{ { \frac { { x – 1 } } { { 2 – 1 } } = \frac { { y – 1 } } { { 4 – 1 } } } = { t , \; \; } } \\ \Rightarrow<br />
{ { \frac { { x – 1 } } { 1 } = \frac { { y – 1 } } { 3 } } = { t \; \; \; } } \kern0pt<br />
{ \text { : } \; \; \left\{ { \begin {array} { * { 2 0 } { l } }<br />
{ x = t + 1 } \\<br />
{ y = 3 t + 1 }<br />
\end{array} } \right . , }<br />
\end {align*} $$
که در آن، پارامتر t t t [ 0 , 1 ] \left[ {0,1} \right] [ 0 , 1 ]
m = ∫ α β ρ ( x ( t ) , y ( t ) ) ⋅ ( d x d t ) 2 + ( d y d t ) 2 d t = ∫ 0 1 ( 3 x ( t ) + 2 y ( t ) ) ⋅ ( d x d t ) 2 + ( d y d t ) 2 d t = ∫ 0 1 ( 9 t + 5 ) 1 2 + 3 2 d t = 10 ∫ 0 1 ( 9 t + 5 ) d t = 10 [ ( 9 t 2 2 + 5 t ) ∣ 0 1 ] = 19 10 2 ≈ 30. \large \begin{align*} m & = \kern0pt { \int \limits _ \alpha ^ \beta { \rho \left ( { x \left ( t \right ) , y \left ( t \right ) } \right ) \cdot } } \kern0pt { { \sqrt { { { \left ( { \frac { { d x } } { { d t } } } \right ) } ^ 2 } + { { \left ( { \frac { { d y } } { { d t } } } \right ) }^ 2 } } d t } } \\ & = { { \int \limits _ 0 ^ 1 { \left ( { 3 x \left ( t \right ) + 2 y \left ( t \right ) } \right ) \cdot } } \kern0pt { { \sqrt { { { \left ( { \frac { { d x } } { { d t } } } \right ) } ^ 2 } + { { \left ( { \frac { { d y} } { { d t } } } \right ) } ^ 2} } d t } } } \\ & = { \int \limits _ 0 ^ 1 { \left ( { 9 t + 5 } \right ) \sqrt { { 1 ^ 2 } + { 3 ^ 2 } } d t } } = { \sqrt { 1 0 } \int \limits _ 0 ^ 1 { \left ( { 9 t + 5 } \right ) d t } } \\ & = { \sqrt { 1 0 } \left [ { \left . { \left ( { \frac { { 9 { t ^ 2 } } } { 2 } + 5 t } \right ) } \right | _ 0 ^ 1 } \right ] } = { \frac { { 1 9 \sqrt { 1 0 } } } { 2 } } \approx { 30 . } \end {align*} m = α ∫ β ρ ( x ( t ) , y ( t ) ) ⋅ ( d t d x ) 2 + ( d t d y ) 2 d t = 0 ∫ 1 ( 3 x ( t ) + 2 y ( t ) ) ⋅ ( d t d x ) 2 + ( d t d y ) 2 d t = 0 ∫ 1 ( 9 t + 5 ) 1 2 + 3 2 d t = 10 0 ∫ 1 ( 9 t + 5 ) d t = 10 ( 2 9 t 2 + 5 t ) 0 1 = 2 19 10 ≈ 30.
مثال ۲
جرم یک سیم با چگالی ρ ( x , y ) = x y \rho \left( {x,y} \right) = xy ρ ( x , y ) = x y x 2 + y 2 = 1 {x^2} + {y^2} = 1 x 2 + y 2 = 1 A ( 1 , 0 ) A\left( {1,0} \right) A ( 1 , 0 ) B ( 0 , 1 ) B\left( {0,1} \right) B ( 0 , 1 )
شکل ۴ حل: ابتدا معادلات پارامتری دایرهای به شعاع 1 1 1
x = cos t , y = sin t \large { x = \cos t , \; \; \; } \kern0pt { y = \sin t } x = cos t , y = sin t
که در آن، پارامتر t t t [ 0 , π 2 ] \left[ {0,{\large\frac{\pi }{2}\normalsize}} \right] [ 0 , 2 π ]
m = ∫ α β ρ ( x ( t ) , y ( t ) ) ⋅ ( d x d t ) 2 + ( d y d t ) 2 d t = ∫ 0 π 2 x ( t ) y ( t ) ⋅ ( d x d t ) 2 + ( d y d t ) 2 d t = ∫ 0 π 2 cos t sin t ⋅ ( d cos t d t ) 2 + ( d sin t d t ) 2 d t = ∫ 0 π 2 cos t sin t ⋅ ( – sin t ) 2 + ( cos t ) 2 d t = ∫ 0 π 2 cos t sin t d t = 1 2 ∫ 0 π 2 sin 2 t d t = 1 4 [ ( – cos 2 t ) ∣ 0 π 2 ] = 1 4 ( – cos π + cos 0 ) = 1 2 . \large \begin{align*} m & = \kern0pt { \int \limits _ \alpha ^ \beta { \rho \left ( { x \left ( t \right ) , y \left ( t \right ) } \right ) \cdot } } \kern0pt { { \sqrt { { { \left ( { \frac { { d x } } { { d t } } } \right ) } ^ 2 } + { { \left ( { \frac { { d y } } { { d t } } } \right ) } ^ 2 } } d t } } \\ & = { { \int \limits _ 0 ^ { \large \frac { \pi } { 2 } \normalsize } { x \left ( t \right ) y \left ( t \right ) \cdot } } \kern0pt { { \sqrt { { { \left ( { \frac { { d x } } { { d t } } } \right ) } ^ 2 } + { { \left ( { \frac { { d y } } { { d t } } } \right ) } ^ 2 } } d t } } } \\ & = { { \int \limits _ 0 ^ { \large \frac { \pi } { 2 } \normalsize } { \cos t \sin t \cdot } } \kern0pt { { \sqrt { { { \left ( { \frac { { d \cos t } } { { d t } } } \right ) } ^ 2 } + { { \left ( { \frac { { d \sin t } } { { d t } } } \right ) } ^ 2 } } d t } } } \\ & = { { \int \limits _ 0 ^ { \large \frac { \pi } { 2 } \normalsize } { \cos t \sin t \cdot } } \kern0pt { { \sqrt { { { \left ( { – \sin t } \right ) } ^ 2 } + { { \left ( { \cos t } \right ) } ^ 2 } } d t } } } \\ & = { \int \limits _ 0 ^ { \large \frac { \pi } { 2 } \normalsize } { \cos t \sin t d t } } = { \frac { 1 } { 2 } \int \limits _ 0 ^ { \large \frac { \pi } { 2 } \normalsize } { \sin 2 t d t } } \\ & = { \frac { 1 } { 4 } \left [ { \left . { \left ( { – \cos 2 t } \right ) } \right | _ 0 ^ { \large \frac { \pi } { 2 } \normalsize } } \right ] } = { \frac { 1 } { 4 } \left ( { – \cos \pi + \cos 0 } \right ) } = { \frac { 1 } { 2 } . } \end {align*} m = α ∫ β ρ ( x ( t ) , y ( t ) ) ⋅ ( d t d x ) 2 + ( d t d y ) 2 d t = 0 ∫ 2 π x ( t ) y ( t ) ⋅ ( d t d x ) 2 + ( d t d y ) 2 d t = 0 ∫ 2 π cos t sin t ⋅ ( d t d cos t ) 2 + ( d t d sin t ) 2 d t = 0 ∫ 2 π cos t sin t ⋅ ( – sin t ) 2 + ( cos t ) 2 d t = 0 ∫ 2 π cos t sin t d t = 2 1 0 ∫ 2 π sin 2 t d t = 4 1 [ ( – cos 2 t ) ∣ 0 2 π ] = 4 1 ( – cos π + cos 0 ) = 2 1 .
مثال ۳
گشتاور لختی I x {I_x} I x x 2 + y 2 = a 2 {x^2} + {y^2} = {a^2} x 2 + y 2 = a 2 ρ = 1 \rho = 1 ρ = 1
حل: معادله پارامتری دایره به صورت زیر است:
{ x = a cos t y = a sin t , 0 ≤ t ≤ 2 π . \large { \left\{ \begin {array} {l} x = a \cos t \\ y = a \sin t \end {array} \right.,\;\;\;}\kern-0.3pt { 0 \le t \le 2 \pi . } { x = a cos t y = a sin t , 0 ≤ t ≤ 2 π .
گشتاور لختی I x {I_x} I x x x x
I x = ∫ C y 2 ρ d s = ∫ 0 2 π ( y ( t ) ) 2 ρ ( x ( t ) , y ( t ) ) ⋅ ( d x d t ) 2 + ( d y d t ) 2 d t . \large \begin{align*} { I _ x } & = \int \limits _ C { { y ^ 2 }\rho d s } \\ & = { \int \limits _ 0 ^ { 2 \pi } { { { \left ( { y \left ( t \right ) } \right ) } ^ 2 } \rho \left ( { x \left ( t \right ) , y \left ( t \right ) } \right ) \cdot } \kern0pt { \sqrt { { { \left ( { \frac { { d x } } { { d t } } } \right ) } ^ 2 } + { { \left ( { \frac { { d y } } { { d t } } } \right ) } ^ 2 } } d t . } } \end {align*} I x = C ∫ y 2 ρ d s = 0 ∫ 2 π ( y ( t ) ) 2 ρ ( x ( t ) , y ( t ) ) ⋅ ( d t d x ) 2 + ( d t d y ) 2 d t .
بنابراین، داریم:
I x = ∫ 0 2 π ( a sin t ) 2 ⋅ 1 ⋅ ( d ( a cos t ) d t ) 2 + ( d ( a sin t ) d t ) 2 d t = ∫ 0 2 π a 2 sin 2 t ⋅ ( – a sin t ) 2 + ( a cos t ) 2 d t = ∫ 0 2 π a 3 sin 2 t ⋅ sin 2 t + cos 2 t d t = a 3 ∫ 0 2 π sin 2 t d t = a 3 ∫ 0 2 π 1 – cos 2 t 2 d t = a 3 2 ∫ 0 2 π ( 1 – cos 2 t ) d t = a 3 2 [ ( t – sin 2 t 2 ) ∣ 0 2 π ] = a 3 2 ( 2 π – 0 ) = π a 3 . \large \begin{align*} { I _ x } & = \kern0pt { \int \limits _ 0 ^ { 2 \pi } { { { \left ( { a \sin t } \right ) } ^ 2 } \cdot 1 \cdot } } \kern0pt { { \sqrt { { { \left ( { \frac { { d \left ( { a \cos t } \right ) } } { {d t } } } \right ) } ^ 2 } + { { \left ( { \frac { { d \left ( { a \sin t } \right ) } } { { d t } } } \right ) } ^ 2 } } d t } } \\ & = { { \int \limits _ 0 ^ { 2 \pi } { { a ^ 2 } { { \sin } ^ 2 } t \cdot } } \kern0pt { { \sqrt { { { \left ( { – a \sin t } \right ) } ^ 2 } + { { \left ( { a \cos t } \right ) } ^ 2 } } d t } } } \\ & = { { \int \limits _ 0 ^ { 2 \pi } { { a ^ 3 } { { \sin } ^ 2 } t \cdot } \kern0pt { \sqrt { { { \sin } ^ 2 } t + { { \cos } ^ 2 } t } d t } } } = { { a ^ 3 } \int \limits _ 0 ^ { 2 \pi } { { { \sin } ^ 2 } t \, d t } } \\ & = { { a ^ 3 } \int \limits _ 0 ^ { 2 \pi } { \frac { { 1 – \cos 2 t } } { 2 } d t } } = { \frac { { { a ^ 3 } } } { 2 } \int \limits _ 0 ^ { 2 \pi } { \left ( { 1 – \cos 2 t } \right ) d t } } \\ & = { \frac { { { a ^ 3 } } } { 2 } \left [ { \left . { \left ( { t – \frac { { \sin 2 t } } { 2 } } \right ) } \right | _ 0 ^ { 2 \pi } } \right ] } = { \frac { { { a ^ 3 } } } { 2 } \left ( { 2 \pi – 0 } \right ) } = { \pi { a ^ 3 } . } \end {align*} I x = 0 ∫ 2 π ( a sin t ) 2 ⋅ 1 ⋅ ( d t d ( a cos t ) ) 2 + ( d t d ( a sin t ) ) 2 d t = 0 ∫ 2 π a 2 sin 2 t ⋅ ( – a sin t ) 2 + ( a cos t ) 2 d t = 0 ∫ 2 π a 3 sin 2 t ⋅ sin 2 t + cos 2 t d t = a 3 0 ∫ 2 π sin 2 t d t = a 3 0 ∫ 2 π 2 1– cos 2 t d t = 2 a 3 0 ∫ 2 π ( 1– cos 2 t ) d t = 2 a 3 [ ( t – 2 sin 2 t ) 0 2 π ] = 2 a 3 ( 2 π –0 ) = π a 3 .
مثال 4
کار انجام شده توسط میدان نیروی F ( x , y ) \mathbf{F}\left( {x,y} \right) F ( x , y ) O ( 0 , 0 ) O\left( {0,0} \right) O ( 0 , 0 ) A ( 1 , 1 ) A\left( {1,1} \right) A ( 1 , 1 ) C C C
C C C y = x y = x y = x C C C y = x y = \sqrt x y = x
حل ۱: کار در امتداد پارهخط y = x y = x y = x
W 1 = ∫ C F ⋅ d r = ∫ C P d x + Q d y = ∫ C x y d x + ( x + y ) d y = ∫ 0 1 x ⋅ x d x + ( x + x ) d x = ∫ 0 1 ( x 2 + 2 x ) d x = ( x 3 3 + x 2 ) ∣ 0 1 = 1 3 + 1 = 4 3 . \large \begin{align*} { W _ 1 } & = \int \limits _ C { \mathbf { F } \cdot d \mathbf { r } } = { \int \limits _ C { P d x + Q d y } } = { \int \limits _ C { x y d x + \left ( { x + y } \right ) d y } } \\ & = { \int \limits _ 0 ^ 1 { x \cdot x d x + \left ( { x + x } \right ) d x } } = { \int \limits _ 0 ^ 1 { \left ( { { x ^ 2 } + 2 x } \right ) d x } } \\ &= { \left . { \left ( { \frac { { { x ^ 3 } } } { 3 } + { x ^ 2 } } \right ) } \right | _ 0 ^ 1 } = { \frac { 1 } { 3 } + 1 } = { \frac { 4 } { 3 } .} \end {align*} W 1 = C ∫ F ⋅ d r = C ∫ P d x + Q d y = C ∫ x y d x + ( x + y ) d y = 0 ∫ 1 x ⋅ x d x + ( x + x ) d x = 0 ∫ 1 ( x 2 + 2 x ) d x = ( 3 x 3 + x 2 ) 0 1 = 3 1 + 1 = 3 4 .
حل ۲: هنگامی که جسم در امتداد منحنی y = x y = \sqrt x y = x
W 2 = ∫ C F ⋅ d r = ∫ C P d x + Q d y = ∫ C x y d x + ( x + y ) d y = ∫ 0 1 x ⋅ x d x + ( x + x ) d x 2 x = ∫ 0 1 ( x 3 2 + x 1 2 2 + 1 2 ) d x = ( x 5 2 5 2 + x 3 2 2 ⋅ 3 2 + x 2 ) ∣ 0 1 = 2 5 + 1 3 + 1 2 = 37 30 . \large \begin{align*} { W _ 2 } & = \int \limits _ C { \mathbf { F } \cdot d \mathbf { r } } = { \int \limits _ C { P d x + Q d y } } = { \int \limits _ C { x y d x + \left ( { x + y } \right ) d y } } \\ & = { \int \limits _ 0 ^ 1 { x \cdot \sqrt x d x } + { \left ( { x + \sqrt x } \right ) \frac { { d x } } { { 2 \sqrt x } } } } = { \int \limits _ 0 ^ 1 { \left ( { { x ^ { \large \frac { 3 } { 2 } \normalsize } } + \frac { { { x ^ { \large \frac { 1 } { 2 } \normalsize } } } }{ 2 } + \frac { 1 } { 2 } } \right ) d x } } \\ & = { \left . { \left ( { \frac { { { x ^ { \large \frac { 5 } { 2 } \normalsize } } } } { { \frac { 5 } { 2 } } } + \frac { { { x ^ { \large \frac { 3 } { 2 } \normalsize } } } } { { 2 \cdot \frac { 3 } { 2 } } } + \frac { x } { 2 } } \right ) } \right | _ 0 ^ 1 } = { \frac { 2 } { 5 } + \frac { 1 } { 3 } + \frac { 1 } { 2 } } = { \frac { { 3 7 } } { { 3 0 } } . } \end {align*} W 2 = C ∫ F ⋅ d r = C ∫ P d x + Q d y = C ∫ x y d x + ( x + y ) d y = 0 ∫ 1 x ⋅ x d x + ( x + x ) 2 x d x = 0 ∫ 1 x 2 3 + 2 x 2 1 + 2 1 d x = 2 5 x 2 5 + 2 ⋅ 2 3 x 2 3 + 2 x 0 1 = 5 2 + 3 1 + 2 1 = 30 37 .
مثال ۵
یک جسم به جرم m m m v 0 v_0 v 0 α \alpha α F = m g \mathbf{F} = m\mathbf{g} F = m g
شکل ۵ حل: ابتدا معادله مسیر را به شکل پارامتری مینویسیم (t t t
x = v 0 x t = v 0 cos α ⋅ t , y = v 0 y t – g t 2 2 = v 0 sin α ⋅ t – g t 2 2 . \large \begin {align*} x & = { v _ { 0 x } } t = { { v _ 0 } \cos \alpha \cdot t,}\\ y & = { v _ { 0 y } } t – \frac { { g { t ^ 2 } } } { 2 } = { { v _ 0 } \sin \alpha \cdot t – \frac { { g { t ^ 2 }} } { 2 } . } \end {align*} x y = v 0 x t = v 0 cos α ⋅ t , = v 0 y t – 2 g t 2 = v 0 sin α ⋅ t – 2 g t 2 .
در لحظه برخورد، y = 0 y=0 y = 0
v 0 sin α ⋅ t – g t 2 2 = 0 , ⇒ t ( v 0 sin α – g t 2 ) = 0 , ⇒ t = 2 v 0 sin α g . \large \begin {align*} & { { v _ 0 } \sin \alpha \cdot t – \frac { { g { t ^ 2 } } } { 2 } = 0 , \; \; } \\ & \Rightarrow { t \left ( { { v _ 0 } \sin \alpha – \frac { { g t } } { 2 } } \right ) = 0 , \; \; } \Rightarrow { t = \frac { { 2 { v _ 0 } \sin \alpha } } { g } .} \end {align*} v 0 sin α ⋅ t – 2 g t 2 = 0 , ⇒ t ( v 0 sin α – 2 g t ) = 0 , ⇒ t = g 2 v 0 sin α .
نیروی گرانشی را میتوان به صورت F = m g = m ( 0 , – g ) \mathbf { F } = m \mathbf { g } = m \left ( { 0 , – g } \right ) F = m g = m ( 0 , – g )
W = ∫ α β ( P d x d t + Q d y d t ) d t = ∫ 0 2 v 0 sin α g ( 0 ⋅ d x d t – g ⋅ d y d t ) d t = – g ∫ 0 2 v 0 sin α g ( d y d t ) d t = – g ∫ 0 2 v 0 sin α g d y ( t ) = – g [ y ( t ) ∣ t = 0 2 v 0 sin α g ] = – g [ ( v 0 sin α t – g t 2 2 ) ∣ t = 0 2 v 0 sin α g ] = – g ( 2 v 0 2 sin 2 α g – 4 g v 0 2 sin 2 α 2 g 2 ) = 0. \large \begin {align*} W & = \int \limits _ \alpha ^ \beta { \left ( { P \frac { { d x } } { { d t } } + Q \frac { { d y } } { { d t } } } \right ) d t } = { \int \limits _ 0 ^ { \large \frac { { 2 { v _ 0 } \sin \alpha } } { g } \normalsize } { \left ( { 0 \cdot \frac { { d x } } { { d t } } – g \cdot \frac { { d y } } { { d t } } } \right ) d t } } \\ & = { – g \int \limits _ 0 ^ { \large \frac { { 2 { v _ 0 } \sin \alpha } } { g } \normalsize } { \left ( { \frac { { d y } } { { d t } } } \right ) d t } } = { – g \int \limits _ 0 ^ { \large \frac { { 2 { v _ 0 } \sin \alpha } } { g } \normalsize } { d y \left ( t \right ) } } \\ & = – g \left [ { \left . { y \left ( t \right ) } \right |_ { t = 0 } ^ { \large \frac { { 2 { v _ 0 } \sin \alpha } } { g } \normalsize } } \right ] = \kern0pt { – g \left [ { \left . { \left ( { { v _ 0 } \sin \alpha t – \frac { { g { t ^ 2 } } } { 2 } } \right ) } \right | _ { t = 0 } ^ { \large \frac { { 2 { v _ 0 } \sin \alpha } } { g } \normalsize } } \right ] } \\ & = { – g \left ( { \frac { { 2 v _ 0 ^ 2 \, { { \sin } ^ 2 } \alpha } } { g } – \frac { { 4 g v _ 0 ^ 2 \, { { \sin } ^ 2 } \alpha } }{ { 2 { g ^ 2 } } } } \right ) } = { 0 . } \end {align*} W = α ∫ β ( P d t d x + Q d t d y ) d t = 0 ∫ g 2 v 0 s i n α ( 0 ⋅ d t d x – g ⋅ d t d y ) d t = – g 0 ∫ g 2 v 0 s i n α ( d t d y ) d t = – g 0 ∫ g 2 v 0 s i n α d y ( t ) = – g y ( t ) ∣ t = 0 g 2 v 0 s i n α = – g ( v 0 sin α t – 2 g t 2 ) t = 0 g 2 v 0 s i n α = – g ( g 2 v 0 2 sin 2 α – 2 g 2 4 g v 0 2 sin 2 α ) = 0.
با توجه به رابطه زیر، نیروی گرانشی زمین پایستار است:
∂ Q ∂ x = ∂ P ∂ y = 0. \large \frac { { \partial Q } } { { \partial x } } = \frac { { \partial P } } { { \partial y } } = 0 . ∂ x ∂ Q = ∂ y ∂ P = 0.
پتانسیل اسکالر میدان را میتوان به شکل کلی زیر نوشت:
u ( x , y ) = ∫ P d x + C 1 ( y ) = ∫ 0 d x + C 1 ( y ) = C 0 + C 1 ( y ) . \large \begin {align*} u \left ( { x , y } \right ) & = { \int { P d x } + { C _ 1 } \left ( y \right ) } \\ &= { \int { 0 d x } + { C _ 1 } \left ( y \right ) } = { { C _ 0 } + { C _ 1 } \left ( y \right ) . } \end {align*} u ( x , y ) = ∫ P d x + C 1 ( y ) = ∫ 0 d x + C 1 ( y ) = C 0 + C 1 ( y ) .
با استفاده از ∂ u ∂ y = Q ( x , y ) = – g { \large \frac { { \partial u } } { { \partial y } } \normalsize } = Q \left ( { x , y } \right ) = – g ∂ y ∂ u = Q ( x , y ) = – g
d d y C 1 ( y ) = – g , ⇒ C 1 ( y ) = – g y + C 2 . \large { \frac { d } { { d y } } { C _ 1 } \left ( y \right ) = – g , \; \; } \Rightarrow { { C _ 1 } \left ( y \right ) = – g y + { C _ 2 } .} d y d C 1 ( y ) = – g , ⇒ C 1 ( y ) = – g y + C 2 .
بنابراین، پتانسیل میدان گرانشی برابر است با:
u ( x , y ) = C 0 – g y + C 2 = C – g y . \large { u \left ( { x , y } \right ) = { C _ 0 } – g y + { C _ 2 } } = { C – g y . } u ( x , y ) = C 0 – g y + C 2 = C – g y .
که در آن، C C C
u ( x , y ) = – g y . \large u \left ( { x , y } \right ) = – g y . u ( x , y ) = – g y .
از این رو، کار انجام شده روی جسم متحرک از مبدأ O ( 0 , 0 ) O\left( {0,0} \right) O ( 0 , 0 ) A ( L , 0 ) A\left( {L,0} \right) A ( L , 0 )
W = u ( A ) – u ( O ) = 0. \large { W = u \left ( A \right ) – u \left ( O \right ) } = { 0 . } W = u ( A ) – u ( O ) = 0.
مثال ۶
میدان مغناطیسی در فاصله r r r I I I
حل: برای به دست آوردن میدان در فاصله r r r r r r I I I
شکل ۶ از آنجایی که میدان B \mathbf{B} B B \mathbf{B} B d r d\mathbf{r} d r B d r Bdr B d r
∮ C B ⋅ d r = ∮ C B d r = B ∮ C d r = 2 π r B . \large { \oint \limits _ C { \mathbf { B } \cdot d \mathbf { r } } = \oint \limits _ C { B d r } } = { B \oint \limits _ C { d r } } = { 2 \pi r B . } C ∮ B ⋅ d r = C ∮ B d r = B C ∮ d r = 2 π r B .
در نتیجه داریم:
2 π r B = μ 0 I \large 2 \pi r B = { \mu _ 0 } I 2 π r B = μ 0 I
یا
B = μ 0 I 2 π r . \large B = \frac { { { \mu _ 0 } I } } { { 2 \pi r } } . B = 2 π r μ 0 I .
مثال ۷
بیشینه نیروی محرکه الکتریکی ε \varepsilon ε E E E 900 km/h 900\,\text{km/h} 900 km/h
حل: مطابق قانون فارادی، داریم:
ε = ∮ C E ⋅ d r = – d ψ d t . \large { \varepsilon = \oint \limits _ C { E \cdot d r } } = { – \frac { { d \psi } } { { d t } } . } ε = C ∮ E ⋅ d r = – d t d ψ .
هنگامی که حلقه رسانا از میدان مغناطیسی زمین عبور میکند، شار مغناطیسی عبوری ψ \psi ψ
فرض کنید میدان مغناطیسی B \mathbf {B} B Δ t \Delta t Δ t
Δ ψ = 2 r B x = 2 r B v Δ t \large { \Delta \psi = 2 r B x } = { 2 r B v \Delta t } Δ ψ = 2 r B x = 2 r B v Δ t
که در آن، x = v Δ t x = v\Delta t x = v Δ t v v v B B B
ε = – d ψ d t = 2 r B v . \large \varepsilon = – \frac { { d \psi } } { { d t } } = 2 r B v . ε = – d t d ψ = 2 r B v .
مقادیر زیر را در نظر میگیریم:
v = 900 km/h = 250 m/s , r = 1 cm = 0.01 m , B = 5 × 1 0 – 5 T , \large { v = 9 0 0 \, \text { km/h } = 2 5 0 \, \text {m/s} , \; \; \; } \kern-0.3pt { r = 1 \, \text {cm} = 0.01\,\text{m},\;\;\;}\kern-0.3pt{B = 5 \times {10^{ – 5}}\,\text{T},} v = 900 km/h = 250 m/s , r = 1 cm = 0.01 m , B = 5 × 1 0 –5 T ,
در نتیجه، نیروی محرکه الکتریکی به دست میآید:
ε = 2 r B v = 2 ⋅ 0.01 ⋅ 5 × 1 0 – 5 ⋅ 250 = 0.00025 V . \large { \varepsilon = 2 r B v } = { 2 \cdot 0 .0 1 \cdot 5 \times { 1 0 ^ { – 5 } } \cdot 250 } = { 0.00 0 2 5 \, \text{V}.} ε = 2 r B v = 2 ⋅ 0.01 ⋅ 5 × 1 0 –5 ⋅ 250 = 0.00025 V .
همانگونه که میبینیم، این مقدار برای انسان بیخطر است.
میدان الکتریکی در حلقه رسانا را میتوان با استفاده از رابطه ε = ∫ C E ⋅ d r \varepsilon = \int\limits_C {\mathbf{E} \cdot d\mathbf{r}} ε = C ∫ E ⋅ d r
طبق تقارن مسئله، میدان الکتریکی القا شده در سراسر حلقه، مقدار ثابتی خواهد داشت و راستای آن در هر نقطه بر حلقه مماس خواهد بود. از این رو، انتگرال خطی حول حلقه برابر است با:
ε = ∮ C E ⋅ d r = ∮ C E ⋅ d r ⋅ cos 0 = E ∮ C d r = 2 π r E . \large { \varepsilon = \oint\limits_C {\mathbf{E} \cdot d\mathbf{r}} }={ \oint\limits _ C { E \cdot dr \cdot \cos 0} } = { E \oint \limits _ C {dr} }={ 2\pi rE.} ε = C ∮ E ⋅ d r = C ∮ E ⋅ d r ⋅ cos 0 = E C ∮ d r = 2 π r E .
در نتیجه، خواهیم داشت:
E = ε 2 π r = 0.00025 2 π ⋅ 0.01 = 0.004 V/m . \large { E = \frac { \varepsilon } { { 2 \pi r } } } = { \frac { { 0.00025 } } { { 2 \pi \cdot 0.01 } } } = { 0.004 \, \text { V/m } . } E = 2 π r ε = 2 π ⋅ 0.01 0.00025 = 0.004 V/m .
اگر این مطلب برای شما مفید بوده است و علاقهمند به یادگیری مباحث مشابه هستید، آموزشهای زیر نیز به شما پیشنهاد میشوند:
^^
فیلم های آموزش انتگرال خطی در فیزیک – به زبان ساده (+ دانلود فیلم آموزش رایگان) فیلم آموزشی محاسبه جرم سیم با انتگرال خطی فیلم آموزشی محاسبه مرکز جرم سیم با انتگرال خطی فیلم آموزشی محاسبه گشتاور لختی سیم با انتگرال خطی فیلم آموزشی محاسبه کار با انتگرال خطی فیلم آموزشی کاربرد انتگرال خطی در الکترومغناطیس 
















با عرض سلام و ادب
مطالب شما با توجه به کمبود منابع مورد نظر برای المپیاد فیزیک سایت خوب شما به من بسیار کمک کرد واقعا ممنونتون هستم