شما در حال مطالعه نسخه آفلاین یکی از مطالب «مجله فرادرس» هستید. لطفاً توجه داشته باشید، ممکن است برخی از قابلیتهای تعاملی مطالب، مانند امکان پاسخ به پرسشهای چهار گزینهای و مشاهده جواب صحیح آنها، نمایش نتیجه آزمونها، پاسخ تشریحی سوالات، پخش فایلهای صوتی و تصویری و غیره، در این نسخه در دسترس نباشند. برای دسترسی به نسخه آنلاین مطلب، استفاده از کلیه امکانات آن و داشتن تجربه کاربری بهتر اینجا کلیک کنید.
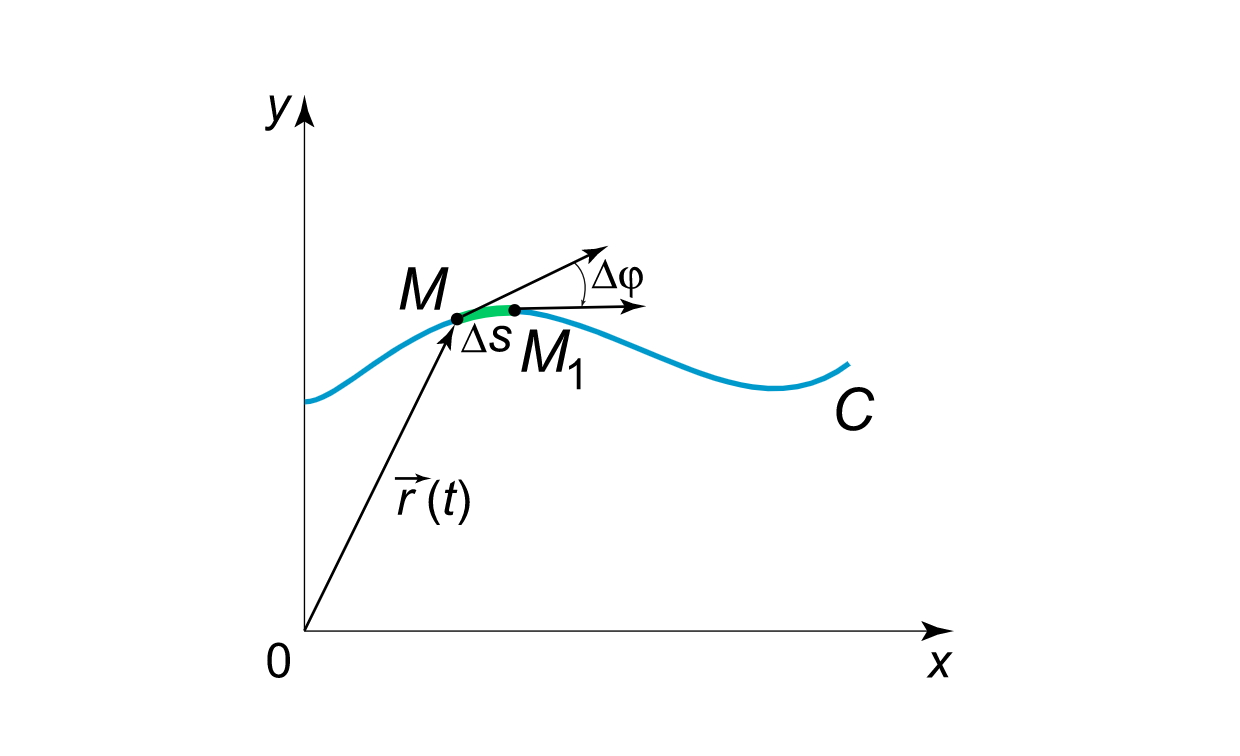
وقتی نقطه M در طول منحنی C حرکت میکند، جهت خط مماس یا شیب تغییر خواهد کرد (شکل ۱).
شکل ۱: منحنی پارامتری
انحنا یا خمیدگی منحنی را میتوان به عنوان نسبت زاویه چرخش Δφ خط مماس نسبت به طول Δs=MM1 کمان یا قوس پیموده شده تعریف کرد. این نسبت ΔsΔφ خمیدگی میانگین یا متوسط منحنی نامیده میشود. وقتی نقطه M1 به نقطه M نزدیک میشود، خمیدگی منحنی در نقطه M به دست میآید:
k=Δs→0limΔsΔφ=dsdφ.
واضح است که خمیدگی k در حالت کلی، بسته به جهت چرخش مماس، مثبت یا منفی است.
اگر یک منحنی با بردار شعاعی r(t) تعریف شده باشد، خمیدگی به صورت زیر خواهد بود:
اگر مختصات یک منحنی با تابع صریح y=f(x) داده شده باشد، خمیدگی با فرمول زیر محاسبه میشود:
k=[1+(y’)2]23y′′.
در حالتی که منحنی در مختصات قطبی به فرم ρ=ρ(φ) داده شده باشد، خمیدگی k با عبارت زیر تعریف میشود:
k(φ)=[ρ2+(ρ’)2]23ρ2+2(ρ’)2–ρρ′′.
خمیدگی منحنی اغلب به عنوان قدر مطلق خمیدگی در نظر گرفته میشود، بدون اینکه جهت چرخش آن در نظر گرفته شود. در این حالت، فرمولهای بالا معتبر هستند، اما قدر مطلق در صورت ظاهر میشود. برای مثال، وقتی مختصات x(t) و y(t) یک منحنی به صورت پارامتری داده شده باشند، فرمول خمیدگی به صورت زیر خواهد بود:
k=[(x’)2+(y’)2]23x’y′′–y’x′′.
وارون خمیدگی، شعاع خمیدگی نامیده میشود:
R=∣k∣1.
دایرهای به این شعاع و مرکز، روی خط قائم داخلی واقع شده است که نزدیکترین تقریب منحنی مسطح در نقطه داد شده است (شکل ۲).
شکل ۲: خط قائم مماس بر دایره
چنین دایرهای، «دایره بوسان» (Osculating Circle) نامیده میشود.
حل: فرض میکنیم معادله صریح خط y=ax+b باشد که در آن، a و b ضرایب ثابت هستند. خمیدگی k و شعاع خمیدگی R این خط راست را محاسبه میکنیم.
قدر مطلق خمیدگی به صورت زیر است:
k=[1+(y’)2]23y′′.
و برای خط راست، داریم:
y’=(ax+b)=a,y′′=a’=0.
بنابراین، نتیجه میگیریم که خمیدگی خط راست برابر با صفر و شعاع خمیدگی بینهایت است.
مثال ۲
معادله منحنی پیمایش راهآهن را به دست آورید.
حل: وقتی جسمی به جرمm با سرعت v در طول یک منحنی حرکت کند، یک «نیروی مرکزگرا» (Centripetal Force) به آن اعمال میشود که اندازهاش به شعاع خمیدگی وابسته است:
F=Rmv2.
نیروی مرکزگرا با یک نیروی واکنشی به نام نیروی مرکزگریز (Centrifugal Force) متعادل میشود که برای مثال، مانند مسافرهای یک قطار در هنگام گردش آن عمل میکند. وقتی جسم در طول قوص یک دایره حرکت کند، نیروی مرکزگریز ثابت باقی میماند. برای جلوگیری از ضربات ناگهانی در پیمایش از حرکت خطی به مدور، از مسیرهای پیمایش خاصی استفاده میشود که در آنها خمیدگی به تدریج و به صورت یکنواخت از ۰ تا مقدار نهایی R1 افزایش مییابد.
فرض کنید منحنی پیمایش به قوس OP (شکل ۳) بستگی دارد که طول آن برابر با L است.
شکل ۳: مسیر پیمایش مثال ۲
وقتی نقطه M در طول این منحنی حرکت کند، شعاع خمیدگی متناسب با مسیر s تغییر میکند:
r1=ms,
که m ضریب تناسب است.
این ضریب را میتوان به سادگی از شرایط مرزی به دست آورد: در s=OP=L، خمیدگی برابر با R1 است:
R1=mL,⇒m=LR1.
در نتیجه، شرط منحنی پیمایش را میتوان با معادله زیر نوشت:
k=r1=LRs,⇒[1+(y’)2]23y′′=LRs.
جواب مسئله به سادگی با قرار دادن s=x به دست میآید، که x تصویر M روی محور x است. در این حالت، مشتق y′ نیز کوچک خواهد بود و میتوانیم در فرمول محاسبه خمیدگی از آن چشمپوشی کنیم. در نتیجه، معادله دیفرانسیل منحنی پیمایش زیر را به دست خواهیم آورد:
y′′=LRx.
با دو بار انتگرالگیری، جواب عمومی معادله به دست خواهد آمد:
y’=2LRx2+C1,y=6LRx3+C1x+C2.
با در نظر گرفتن شرایط اولیه y(x=0)=0 و y’(x=0)=0، معادله منحنی پیمایش نهایی به صورت زیر خواهد بود:
سید سراج حمیدی دانشآموخته مهندسی برق است و به ریاضیات و زبان و ادبیات فارسی علاقه دارد. او آموزشهای مهندسی برق، ریاضیات و ادبیات مجله فرادرس را مینویسد.
شما در حال مطالعه نسخه آفلاین یکی از مطالب «مجله فرادرس» هستید. لطفاً توجه داشته باشید، ممکن است برخی از قابلیتهای تعاملی مطالب، مانند امکان پاسخ به پرسشهای چهار گزینهای و مشاهده جواب صحیح آنها، نمایش نتیجه آزمونها، پاسخ تشریحی سوالات، پخش فایلهای صوتی و تصویری و غیره، در این نسخه در دسترس نباشند. برای دسترسی به نسخه آنلاین مطلب، استفاده از کلیه امکانات آن و داشتن تجربه کاربری بهتر اینجا کلیک کنید.