شما در حال مطالعه نسخه آفلاین یکی از مطالب «مجله فرادرس» هستید. لطفاً توجه داشته باشید، ممکن است برخی از قابلیتهای تعاملی مطالب، مانند امکان پاسخ به پرسشهای چهار گزینهای و مشاهده جواب صحیح آنها، نمایش نتیجه آزمونها، پاسخ تشریحی سوالات، پخش فایلهای صوتی و تصویری و غیره، در این نسخه در دسترس نباشند. برای دسترسی به نسخه آنلاین مطلب، استفاده از کلیه امکانات آن و داشتن تجربه کاربری بهتر اینجا کلیک کنید.
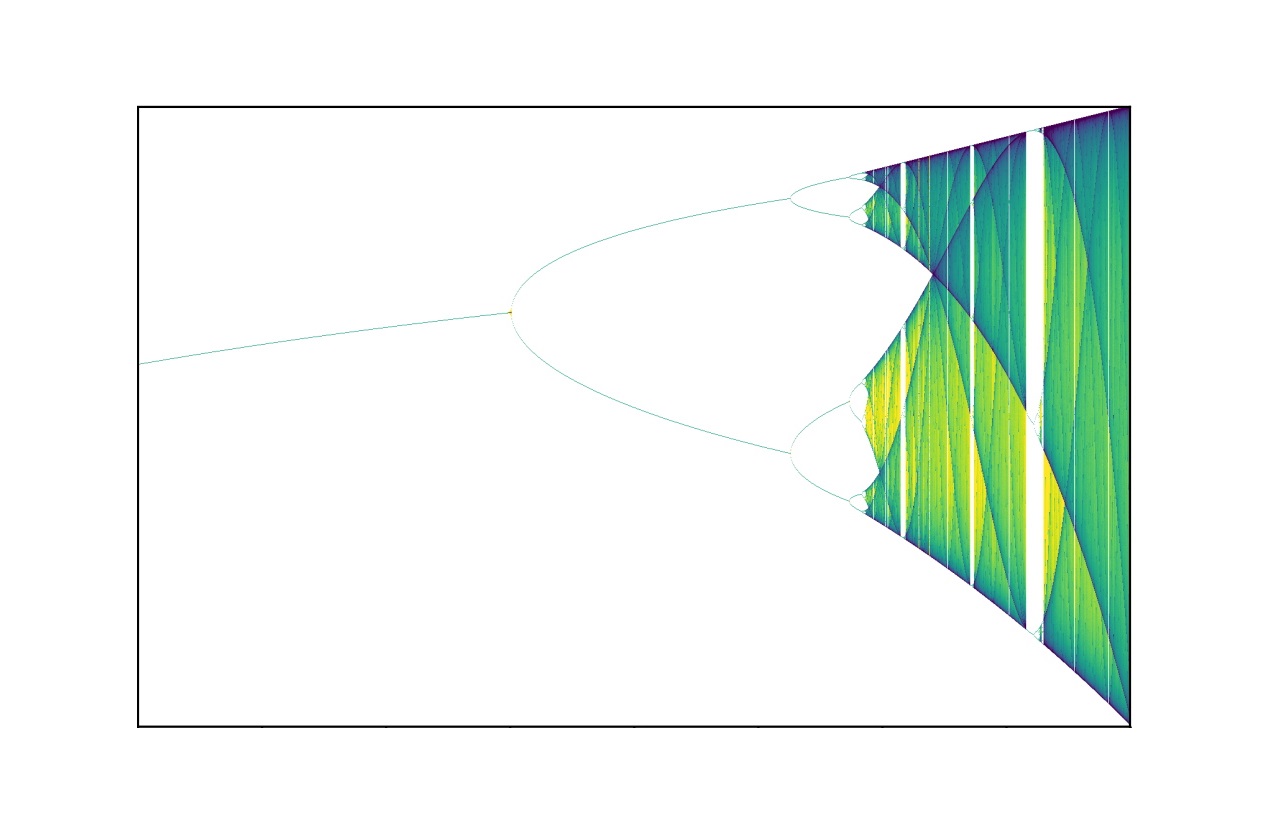
در آموزشهای پیشین مجله فرادرس، با نظریه آشوب و فراکتالها آشنا شدیم. در این آموزش نظریه انشعاب را معرفی میکنیم. «نظریه انشعاب» یا «نظریه دوشاخگی» (Bifurcation Theory) آن دسته از سیستمهای دینامیکی را بررسی میکند که تغییرات کوچک در پارامترهای آنها، موجب تغییر ناگهانی در رفتار کیفی یا توپولوژیکیشان میشود.
بسیاری از معادلات دیفرانسیل - اگر نگوییم همه آنها - به پارامترها وابسته هستند. بسته به مقادیر این پارامترها، رفتار کیفی جوابهای یک سیستم میتواند کاملاً متفاوت باشد. به عبارت دیگر، میگوییم دستگاه معادله دیفرانسیلِ
یک انشعاب در مقدار μ=μc دارد، اگر در هنگام عبور پارامتر μ از μc تغییری ناگهانی در ساختار مسیر موجود به وجود آید. به عبارت دیگر، در انشعاب با تغییر تعداد و یا پایدارینقطه تعادل سیستم موجه خواهیم بود.
چند مثال از نظریه انشعاب
در این بخش، برای درک مفهوم نظریه انشعاب، چند مثال را بررسی میکنیم.
مثال اول نظریه انشعاب
معادله زیر را در نظر بگیرید:
x˙=μ−x2.
اگر μ>0 باشد، دو نقطه تعادل x∗=±μ خواهیم داشت. مشتق سمت راست معادله Df(x,μ)=−2x است. مقدار این مشتق را در نقاط ثابت به دست میآوریم: Df(μ,μ)=−2μ<0، که نشان میدهد نقطه تعادل x∗=−u پایدار است؛ و Df(−μ,μ)=2μ>0 که مبین ناپایدار بودن نقطه تعادل x∗=−μ است. اگر μ<0 باشد، تعادلی وجود نخواهد داشت. وقتی μ=0 باشد، سیستم تنها یک نقطه تعادل، یعنی x∗=0، دارد. در این حالت، نقطه تعادل «غیرهذلولوی» (Nonhyperbolic) است، زیرا Df(0,0)=0، و نمیتوانیم از خطیسازی برای تحلیل پایداری آن استفاده کنیم. در این مورد، «رخساره فاز» (Phase Portrait) میتواند راهگشا باشد.
شکل ۱: نمودار انشعاب مثال اول
نتیجه میگیریم که نقطه تعادل x∗=0 یک نقطه یا گره زینی ناپایدار است. این سیستم دارای یک انشعاب نقطه زینی در μ=0 است (شکل ۲ را ببینید).
شکل ۲: نمودار انشعاب مثال اول
مثال دوم نظریه انشعاب
معادله زیر داده شده است:
x˙=μx−x2.
این معادله دو نقطه تعادل دارد: x∗=0 و x∗=μ. مشتق فضای برداریDf(x,μ)=μ−2x است. با محاسبه این مشتق در x∗=0، مقدار Df(0,μ)=μ را به دست خواهیم آورد که به معنی پایداری نقطه تعادل در صورت μ<0 و ناپایداری آن برای μ>0 است. همچنین، مقدار Df(μ,μ)=−μ را داریم که بیان میکند x∗=μ پایدار است اگر μ>0 باشد و ناپایدار است اگر μ<0.
اگر μ=0، سیستم نقطه تعادل x∗=0 را خواهد داشت. از آنجا که Df(0,0)=0، نقطه تعادل x∗=0 غیرهذلولوی است. مشابه قبل، از رخساره فاز برای بررسی پایداری استفاده میکنیم. به نظر میرسد که رخساره فاز در این حالت مشابه همانی است که در شکل ۱ دیدیم. بنابراین، وقتی μ=0 باشد، نقطه تعادل x∗=0 یک نقطه زینی و در نتیجه ناپایدار است. در این حالت، میگوییم سیستم در مقدار پارامتر μ=0 یک «انشعاب تَرابحرانی» (Transcritical Bifurcation) دارد. وقتی پارامتر μ از مقدار μ=0 عبور کند، پایداری تعادل سیستم تغییر میکند.
شکل ۳: نمودار انشعاب مثال دوم
مثال سوم نظریه انشعاب
معادله زیر را در نظر بگیرید:
x˙=μx−x3.
اگر μ>0 باشد، این معادله سه نقطه تعادل خواهد داشت: x∗=0، x∗=±μ. مشتق تابع برابر با Df(x,μ)=μ−3x2 است. بنابراین، Df(0,μ)=μ>0 است که نتیجه میدهد نقطه ثابت x∗=0 ناپایدار است. همچنین، Df(±μ,μ)=−2μ<0، که در نتیجه آن میتوان گفت که هر دو نقطه تعادل دیگر پایدار هستند. اگر μ<0 باشد، تنها نقطه تعادل x∗=0 و Df(0,μ)=μ<0 است، بنابراین، نقطه تعادل پایدار خواهد بود. اگر μ=0 باشد، مجدداً، تنها نقطه تعادل x∗=0 است. از آنجا که Df(0,0)=0، نقطه تعادل غیرهذلولوی است. مشابه مثالهای قبل، رخساره فاز شکل ۴ را خواهیم داشت.
شکل ۴: رخساره فاز مثال سوم
مشاهده میکنیم که نقطه تعادل در این حالت پایدار است. در پارامتر μ=0، سیستم در وضعیتی است که «انشعاب چنگالی» (Pitchfork Bifurcation) نامیده میشود (شکل ۵ را ببینید).
شکل ۵: نمودار انشعاب مثال سوم
انشعاب هوپف
یک «انشعاب هوپف» (Hopf Bifurcation) زمانی رخ میدهد که با تغییر پارامتر μ یک جواب دورهای (متناوب) یا چرخه حدی در اطراف نقطه تعادل به وجود آید یا از آن دور شود. وقتی یک چرخه حدی پایدار حول نقطه تعادل ناپایدار قرار داشته باشد، انشعاب یک «انشعاب هوپف اَبَربحرانی» (Supercritical Hopf Bifurcation) نامیده میشود. اگر چرخه حدی ناپایدار و حول یک نقطه تعادل پایدار باشد، آنگاه انشعاب یک «انشعاب هوپف زیربحرانی» (Subcritical Hopf Bifurcation) نامیده میشود.
قبل از بیان قضیه، مثالی از یک انشعاب هوپف را در یک سیستم دوبعدی در مختصات قطبی بررسی میکنیم.
مثال اول انشعاب هوپف
سیستم زیر را در نظر بگیرید:
r˙θ˙r=r(μ−r2),=−1,≥0.
تنها نقطه بحرانی این سیستم r∗=0، یعنی همان مبدأ است. از آنجا که θ˙<0 است، مسیرها در جهت عقریههای ساعت حول مبدأ حرکت میکنند. اگر μ=0 باشد، آنگاه r˙=−r3 است. برای r غیرصفر، نامساوی r˙<0 را داریم. بنابراین، مسیر بستهای وجود ندارد و وقتی t→∞ همه مسیرها به مبدأ متمایل میشوند.
مبدأ یک «کانون» (Focus) پایدار است (شکل ۶ را مشاهده کنید). اگر μ<0 باشد، آنگاه μ−r2<0 است (برای هر r).
شکل ۶: رخساره فاز مثال اول انشعاب هوپف با μ=0. مبدأ یک کانون پایدار است.
مشابه مورد قبلی، برای مقادیر غیرصفر r نامساوی r˙<0 برقرار است. همچنین، مسیر بستهای وجود ندارد و مبدأ یک کانون پایدار است (شکل ۷).
شکل ۷: رخساره فاز مثال اول انشعاب هوپف با μ=−0.5. مبدأ یک کانون پایدار است.
حال اگر μ>0 باشد، آنگاه برای r∈(μ,∞) نامساوی r˙<0 و برای همه مقادیر r نامساوی μ−r2<0 را داریم. مبدأ یک کانون ناپایدار است و یک مدار یا مسیر بسته پایدار r=μ وجود دارد (شکل ۸ را مشاهده کنید).
شکل ۸: رخساره فاز مثال اول انشعاب هوپف با μ=2. مبدأ یک کانون ناپایدار است و یک مسیر بسته پایدار r=μ وجود دارد.
در این حالت، یک انشعاب هوپف اَبَربحرانی در مقدار پارامتر μ=0 رخ داده است (شکل ۹ را ببینید).
شکل ۹: نمودار دوشاخگی مثال اول انشعاب هوپف: یک دوشاخگی هوپف اَبَربحرانی.
قضیه انشعاب هوپف
سیستم «مسطح» (Planar) زیر را در نظر بگیرید:
x˙y˙=fμ(x,y),=gμ(x,y),
که در آن، μ یک پارامتر است. فرض کنید این سیستم یک نقطه ثابت دارد که بدون از دست دادن کلیت مسئله، میتوانیم فرض کنیم در (x,y)=(0,0) واقع شده است. فرض کنید مقادیر ویژه سیستم خطیشده حول نقطه ثابت λ(μ),λ(μ)=α(μ)±iβ(μ) باشند. همچنین فرض کنید برای مقدار مشخصی از μ (که فرض میکنیم 0 باشد)، شرایط زیر برقرارند:
α(0)=0 و β(0)=ω=0 که sgn(ω)=sgn[∂gμ/∂x)∣μ=0(0,0)] (شرایط غیرهذلولوی بودن: مقادیر ویژه موهومی).
dμdα(μ)∣μ=0=d=0 (شرط تقاطعپذیری: مقادیر ویژه محور موهومی را با سرعت غیرصفر قطع میکنند).
a=0، که a=161(fxxx+fxyy+gxxy+gyyy)+16ω1(fxy(fxx+fyy)−gxy(gyx(gxx+gyy)−fxxgxx+fyygyy با fxy=(∂2fμ/∂x∂y)∣μ=0(0,0) و غیره (شرط عمومیت).
در نتیجه، اگر ad<0 یا ad>0 باشد، به ترتیب، یک منحنی یکتا از جوابهاب دورهای از مبدأ به ناحیه μ>0 یا μ<0 انشعاب ایجاد میکنند. به ازای μ>0، مبدأ یک نقطه ثابت پایدار است و برای μ<0 یک نقطه ثابت ناپایدار خواهد بود، در حالی که اگر مبدأ در μ=0 (که جوابهای دورهای وجود دارند) ناپایدار باشد، جوابهای دورهای پایدار هستند.
دامنه مسیرهای بسته دورهای تا ∣μ∣ افزایش مییابد، در حالی که دوره تناوب آنها وقتی ∣μ∣ به صفر میل میکند، تا 2π/∣ω∣ هم میرسد.
مثال دوم انشعاب هوپف
«معادله لینارد» (Liénard Equation) را در نظر بگیرید:
x¨−(μ−x2)x˙+x=0.
اگر u=x و v=x˙ را در نظر بگیریم، معادله را میتوان به صورت یک دستگاه معادلاتمرتبه اول دوبعدی نوشت:
u˙v˙=v,=−u+(μ−u2)v.
تنها نقطه تعادل مبدأ است. ماتریس ژاکوبی سیستم خطیشده حول مبدأ به صورت زیر است:
(0−11μ).
مقادیر ویژه ماتریس ژاکوبی α(μ)±β(μ)=μ/2±i4−μ2/2 هستند. توجه کنید که α(0)=0 و ω=β(0)=−1=0 است. همچنین، d=dμdα(μ)∣μ=0=1/2=0 است. در نهایت، a=−81=0. بنابراین، همه شرایط قضیه انشعاب هوپف برقرار است. در نتیجه، ad=−1/16<0 و مبدأ برای μ<0 پایدار است (شکل ۱۰ را ببینید) و برای μ>0 ناپایدار است، در حالی که یک مسیر بسته دورهای پایدار وجود دارد (شکل ۱۱). سیستم دارای یک انشعاب هوپف ابربحرانی در μ=0 است.
شکل ۱۰: رخساره فاز مثال دوم انشعاب هوپف با μ=−0.3. مبدأ یک کانون پایدار است.شکل ۱۱: رخساره فاز مثال دوم انشعاب هوپف با μ=1. مبدأ یک کانون ناپایدار است و یک مسیر بسته دورهای پایدار وجود دارد.
مثال سوم انشعاب هوپف
«مدل شلکوف» (Sel’kov Model) گلیکولیز یا قندکافت را که فرایند از بین بردن قند با سلولهای زنده برای به دست آوردن انرژی است، در نظر بگیرید:
x˙y˙=−x+ay+x2=b−ay−x2y,
که x و y، به ترتیب، غلظت ADP و F6P هستند و a,b>0. نقطه تعادل سیستم به صورت زیر است:
x∗=b,y∗=a+b2b.
اگر مختصات را با قرار دادن x=x−b و y=y−a+b2b تغییر دهیم، آنگاه x=x+b، y=y+a+b2b، x˙=x˙ و y˙=y˙ را خواهیم داشت. آنگاه اگر x=x و y=y را تغییر نام دهیم، سیستم به صورت زیر درخواهد آمد:
اکنون مقدار پارامتر α=0.1 را تصحیح میکنیم. در نتیجه، b1(a)=b1(0.1)≈0.419992 و b2(a)=b2(0.1)≈0.789688 را خواهیم داشت. همچنین، ω1=β(0.1,b1(0.1))≈−0.525731، ω2=β(0.1,b2(0.1))≈−0.850651، d1=dbdα(0.1,b)b=b1(0.1)≈0.679561 و d2=dbdα(0.1,b)b=b2(0.1)≈−0.488054 را داریم. در نهایت، مقادیر عبارت شرط ۳ قضیه a1≈−1.223 و a2≈−0.475021 هستند.
بنابراین، برای هر دو مقدار پارامتر b، قضیه انشعاب هوپف اعمال میشود. در هریک از دو حالت، b=b1≈0.419992 و b=b2≈0.789688، یک انشعاب هوپف وجود دارد. دو نامساوی d1>0 و a1d1<0 را داریم. بنابراین، مبدأ برای b<b1 پایدار است و یک چرخه حدی پایدار برای b>b1 وجود دارد که b به اندازه کافی کوچک است. علاوه بر این، d2<0 و a2d2>0 است. در نتیجه، مبدأ در ناحیه b1<b<b2 ناپایدار است. در این ناحیه یک چرخه حدی یکتا و پایدار وجود دارد (شکلهای ۱۲، ۱۳ و ۱۴ را ببینید).
شکل ۱۲: رخساره فاز برای مثال سوم انشعاب هوپف با b=0.6. مبدأ یک کانون ناپایدار است و یک مسیر بسته دورهای پایدار وجود دارد.شکل ۱۳: رخساره فاز مثال سوم انشعاب هوپف با b=0.3. مبدأ یک کانون پایدار است.شکل ۱۴: رخساره فاز مثال سوم انشعاب هوپف با b=0.9. مبدأ یک کانون پایدار است.
جمعبندی
نظریه انشعاب یک زمینه پژوهشی گسترده و فعال است. در این آموزش، با چند مثال ساده، برخی از انواع مختلف انشعابها را در دستگاه معادلات دیفرانسیل معمولی یکبعدی و دوبعدی بررسی کردیم. همچنین نمونههای انشعاب را از طریق رخساره فاز، نمودارهای انشعاب و قضیه انشعاب هوپف مورد تجزیه و تحلیل قرار دادیم.
سید سراج حمیدی دانشآموخته مهندسی برق است و به ریاضیات و زبان و ادبیات فارسی علاقه دارد. او آموزشهای مهندسی برق، ریاضیات و ادبیات مجله فرادرس را مینویسد.
شما در حال مطالعه نسخه آفلاین یکی از مطالب «مجله فرادرس» هستید. لطفاً توجه داشته باشید، ممکن است برخی از قابلیتهای تعاملی مطالب، مانند امکان پاسخ به پرسشهای چهار گزینهای و مشاهده جواب صحیح آنها، نمایش نتیجه آزمونها، پاسخ تشریحی سوالات، پخش فایلهای صوتی و تصویری و غیره، در این نسخه در دسترس نباشند. برای دسترسی به نسخه آنلاین مطلب، استفاده از کلیه امکانات آن و داشتن تجربه کاربری بهتر اینجا کلیک کنید.



























سلام، خیلی ممنون که مطالب ریاضی هم قرار دادید. متن خیلی خوبی داره و واضح بیان شده. امیدوارم بیشتر از این مطالب قرار بدید. واقعا متشکرم.