



معادلات حالت در مدار – به زبان ساده (+ دانلود فیلم آموزش رایگان)
معادلات حالت در مدار یکی از روشهای بسیار مهم برای تجزیه و تحلیل مدارات پیچیده و مدارات دارای چند ورودی و چند خروجی است. اکثر روشهای تحلیل مدار برای آنالیز مدارات با یک ورودی و یک خروجی کاربرد دارند. اما در بسیاری از سیستمهای مهندسی تعداد زیادی ورودی و خروجی وجود دارند. در این مطلب قصد داریم تا به بررسی روش معادلات حالت در تحلیل مدارات الکتریکی بپردازیم.


فیلم آموزشی معادلات حالت در مدار
معادلات حالت یا مدل متغیر حالت، نسبت به مدل تک ورودی-تک خروجی بسیار عمومیتر است. در مدل متغیر حالت، مجموعهای از متغیرها را مشخص میکنیم، که توصیفکننده رفتار داخلی سیستم هستند. این متغیرها به عنوان متغیرهای حالت سیستم شناخته میشوند و میتوانند تعیینکننده رفتار آینده سیستم، در صورت مشخص بودن حالتهای سیستم و ورودی آن باشند.
به عبارت دیگر اگر متغیرهای حالت مشخص باشند، اجازه میدهند که سایر متغیرهای سیستم فقط با استفاده از معادلات جبری به دست آیند. متغیر حالت یک مشخصه فیزیکی است که حالت سیستم را بدون توجه به اینکه سیستم چگونه به آن نقطه رسیده است، مشخص میکند.

فشار، حجم و دما، مثالهای متداول متغیرهای حالت هستند. در یک مدار الکتریکی، جریان سلفها و ولتاژ خازنها به عنوان متغیرهای حالت انتخاب میشوند. زیرا این متغیرها میتوانند وضعیت انرژی سیستم را توصیف کنند.
آسانترین راه برای نمایش معادلات فضای حالت، چیدن آنها به صورت مجموعهای از معادلات دیفرانسیل مرتبه اول به صورت زیر است:
در فرمول بالا بردار حالتهای سیستم از مرتبه n است و از تمام متغیرهای حالت سیستم تشکیل شده است.
اگر نشاندهنده مشتق مرتبه اول متغیرهای حالت نسبت به زمان باشد، در نتیجه داریم:
همچنین بردار ورودیهای سیستم به ازای m ورودی، به صورت زیر است:
A و B به ترتیب هر کدام ماتریسهای و هستند. علاوه بر معادله بالا، به معادله خروجی هم نیاز داریم. در نتیجه معادلات فضای حالت کامل به صورت زیر نوشته میشود:
که در فرمول بالا بردار خروجیهای سیستم و به صورت زیر است:
همچنین ماتریسهای C و D به ترتیب دارای ابعاد و هستند. برای موارد خاصی که سیستم تک ورودی-تک خروجی باشد، است.
با فرض شرایط اولیه صفر، تابع انتقال سیستم از طریق تبدیل لاپلاس گرفتن از معادله حالت، به صورت زیر به دست میآید:
فرمول بالا را میتوان به فرم زیر نیز نوشت:
که در این فرمول، I ماتریس همانی است. حال از معادله به دست آمده برای خروجی سیستم نیز تبدیل لاپلاس میگیریم.
حال تابع انتقال سیستم از طریق تقسیم کردن تبدیل لاپلاس خروجی بر تبدیل لاپلاس ورودی به صورت زیر به دست میآید:
در فرمول بالا، A ماتریس سیستم، B ماتریس کوپل ورودی، C ماتریس خروجی و D ماتریس فیدبک هستند. در اکثر موارد ماتریس D برابر با صفر است. بنابراین درجه صورت H(S) کمتر از مخرج آن است. برای محاسبه تابع انتقال یک مدار میتوان از نرمافزار MATLAB نیز استفاده کرد.
در حالت کلی برای آنالیز متغیر حالت، سه گام زیر را میتوان در نظر گرفت.
- جریان سلف و ولتاژ خازن را به عنوان متغیرهای حالت مدار انتخاب میکنیم.
- قوانین KVL و KCL را به مدار اعمال کنیم و متغیرهای مدار (ولتاژ و جریان) را بر حسب متغیرهای حالت (در گام اول) به دست میآوریم. انجام این کار منجر به یک سری معادلات دیفرانسیل مرتبه اول میشود، که برای تعیین تمام متغیرهای حالت مدار لازم و کافی است.
- معادله خروجی سیستم را به دست میآوریم و سپس نتیجه نهایی را در فرم کلی معادلات حالت جایگذاری میکنیم.
حال این سه گام را در مثال زیر بررسی میکنیم.
مثال معادلات حالت در مدار
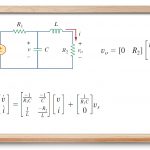
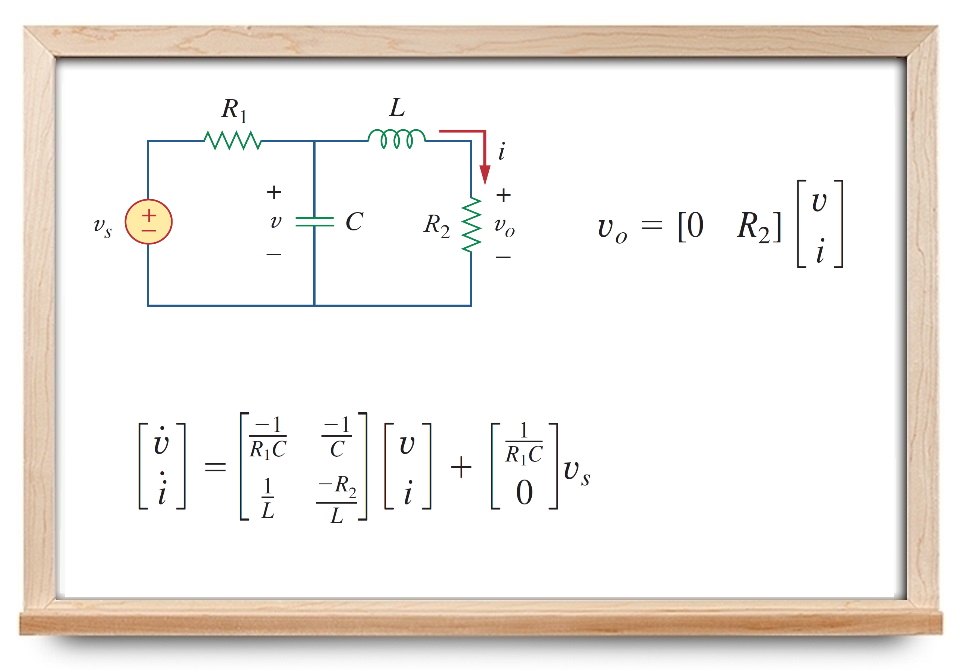
نمایش فضای حالت مدار شکل زیر را بیابید و تابع انتقال آن را به دست بیاورید. توجه کنید که ورودی و خروجی سیستم هستند. مقادیر ، و هستند.

متغیرهای ولتاژ خازن () و جریان سلف () را به عنوان متغیرهای حالت سیستم انتخاب میکنیم.
در گره ۱ KCL را اعمال میکنیم.
معادله بالا را میتوان به فرم زیر نیز نوشت:
چون مقدار ولتاژ یکسانی () از مقاومت R و نیز خازن C میگذرد، با اعمال KVL فرمول زیر به دست میآید:
میتوانیم را به صورت زیر بنویسیم:
حال معادلات فضای حالت به صورت زیر به دست میآید:
با جایگذاری مقادیر مربوط به سلف، خازن و مقاومت، ماتریسهای ضرایب در معادله بالا به فرم زیر نوشته میشوند:
همچنین داریم:
حال با گرفتن معکوس از مقدار بالا داریم:
بنابراین تابع انتقال به صورت زیر به دست میآید:
اگر از مدار بالا تبدیل لاپلاس گرفته شود و مقدار محاسبه شود، دقیقا با مقدار به دست آمده در بالا برابر خواهد بود. اما توجه کنید که در این مثال یک ورودی و یک خروجی وجود داشت، در حالی که مزیت اصلی روش متغیر حالت در مدارهای چند ورودی و چند خروجی خود را نشان میدهد.

اگر مطالب بیان شده برای شما مفید بوده و میخواهید درباره موضوعات مرتبط با آن بیشتر بدانید، پیشنهاد میکنیم به آموزشهای زیر مراجعه کنید:
- مجموعه آموزشهای مهندسی برق
- آموزش مدارهای الکتریکی ۱
- مجموعه آموزشهای مهندسی الکترونیک
- آموزش مدارهای الکتریکی ۱ (مرور و حل تست)
- تحلیل مش — به زبان ساده
- تحلیل گره — به زبان ساده
- قضیه هم پاسخی — به زبان ساده
^^











من هم همین اشتباه را داشتم. تابع تبدیل حاصل تقسیم خروجی y بر ورودی است پس h=y/z است و در متن درست است
درود، در بخش توضیح تابع H(s) تقسیم Y بر Z قرار گرفته که اشتباه است، لطفا تصحیح بفرمایید
متن و فیلم صحیح است. تابع تبدیل یعنی خروجی به ورودی یعنی y/z .
سلام.
آنچه در متن نوشته شده، صحیح است.
شاد باشید.