شما در حال مطالعه نسخه آفلاین یکی از مطالب «مجله فرادرس» هستید. لطفاً توجه داشته باشید، ممکن است برخی از قابلیتهای تعاملی مطالب، مانند امکان پاسخ به پرسشهای چهار گزینهای و مشاهده جواب صحیح آنها، نمایش نتیجه آزمونها، پاسخ تشریحی سوالات، پخش فایلهای صوتی و تصویری و غیره، در این نسخه در دسترس نباشند. برای دسترسی به نسخه آنلاین مطلب، استفاده از کلیه امکانات آن و داشتن تجربه کاربری بهتر اینجا کلیک کنید.
جاذب ارتعاشات (Vibration Absorber) که گاهی وقتها جاذب دینامیکی ارتعاشات نیز نامیده میشود، قطعهای مکانیکی است که برای کاهش یا حذف ارتعاشات ناخواسته مورد استفاده قرار میگیرد. جاذب ارتعاشات خودش دارای جرم و سفتی است که برای محافظت از جسم اصلی در مقابل ارتعاشات، به آن اضافه میشود. از این رو، جرم اصلی به اضافه جرم جاذب، یک سیستم دو درجه آزادی را تشکیل میدهند و جاذب ارتعاشات دارای دو فرکانس اصلی خواهد بود.
کاربرد اصلی جاذب ارتعاشات در ماشینآلاتی است که با سرعت ثابت کار میکنند. زیرا این قطعات برای فرکانس مشخصی تنظیم میشوند و فقط در یک باند فرکانسی باریک مؤثر خواهند بود. جاذب ارتعاشات به طور گسترده در ابزارهای رفت و برگشتی (مانند چرخهای سنباده، ارهها و و ماشینهای کامپکتور) و موتورهای احتراق داخلی که به منظور کاهش مصرف سوخت با سرعت ثابت کار میکنند، کاربرد دارد. در چنین سیستمهایی، جاذب ارتعاشات به موازنه نیروهای رفت و برگشتی کمک میکند. اگر از جاذب ارتعاشات استفاده نشود، نیروهای رفت و برگشتی غیر متوازن، نگه داشتن یا کنترل دستگاه را با مشکل مواجه خواهند ساخت.
از سوی دیگر، جاذب ارتعاشات در خطوط انتقال ولتاژ بالا هم کاربرد دارد. در این مورد، جاذب دینامیکی ارتعاشات، مطابق شکل زیر، مانند یک دمبل ورزشی از خطوط انتقال آویزان میشود تا اثرات خستگی مربوط به ارتعاشات ناشی از وزش باد را کاهش دهد.
همانطور که میدانید، اگر فرکانس نیروی تحریک نزدیک به فرکانس طبیعی ماشین باشد، ارتعاشات ماشین بسیار شدید خواهد بود. در چنین وضعیتی، میتوان با استفاده از یک جاذب ارتعاشات یا خنثیکننده ارتعاشات (Vibration Neutralizer) که تنها یک سیستم جرم و فنر است، دامنه ارتعاشات را به سادگی کاهش داد. جاذب دینامیکی ارتعاشات به گونهای طراحی میشود که فرکانسهای طبیعی سیستم نهایی، فاصله زیادی با فرکانس تحریک داشته باشد.
جاذب ارتعاشات نامیرا
هنگامی که جرم کمکی m2 را با کمک فنری با سفتی k2 به جرم اصلی ماشین m1 متصل میکنیم (منظور از جرم اصلی، جرم سیستم قبل از اضافه شدن جاذب ارتعاشات است)، سیستم نهایی دو درجه آزادی به صورت شکل زیر خواهد بود.
هدف اصلی از اضافه کردن جاذب، کاهش دامنه حرکتی ماشین یعنی X1 است. لذا برای اینکه بتوانیم دامنه ارتعاشات جرم m1 را حذف کنیم، کافیست تا صورت کسر را در رابطه ۱ برابر صفر قرار دهیم.
ω2=m2k2
اگر ماشین، پیش از اضافه شدن جاذب ارتعاشات در حالتی نزدیک به حالت رزونانس نوسان داشته باشد، رابطه زیر را میتوان نوشت.
ω2≅ω12=m1k1
بنابراین، اگر جاذب ارتعاشات به صورت ω2=m2k2=m1k1 طراحی شود، دامنه ارتعاشات ماشین در فرکانس تشدید صفر خواهد بود. فرکانس طبیعی ماشین یا سیستم اصلی را به صورت زیر تعریف میکنیم.
δst=k1F0ω1=(m1k1)1/2
همچنین فرکانس طبیعی سیستم کمکی یا جاذب ارتعاشات را نیز به صورت ω2=(m2k2)1/2 در نظر بگیرید. حالا میتوانیم رابطههای ۱ و ۲ را به شکل زیر بازنویسی کرد.
شکل زیر، تغییرات دامنه ارتعاشات ماشین (δstX1) را نسبت به سرعت ماشین (ω1ω) به خوبی نشان میدهد. قلههای نشان داده شده در این نمودار با فرکانسهای طبیعی سیستم دو درجه آزادی جدید متناظر هستند. همانطور که پیشتر نشان دادیم، در فرکانس ω=ω1، رابطه X1=0 برقرار است. در این فرکانس، رابطه ۴ به صورت زیر خواهد بود.
X2=−k2k1δst=−k2F0
به عبارت دیگر، نیروی حاصل از فنر کمکی، در خلاف جهت (k2X2=−F0) بوده و آن را خنثی میکند. در ادامه این روند، آنقدر X1 را کاهش میدهد تا مقدارش را به صفر برساند. اکنون میتوانیم برای یافتن سایز جاذب ارتعاشات از رابطه زیر کمک بگیریم.
k2X2=m2ω2X2=−F0
(رابطه ۵)
بنابراین، با توجه به مقدار مجاز X2 قادر خواهیم بود اندازه k2 و m2 را تعیین کنیم.
با دقت در شکل قبل درمییابیم که اگرچه اضافه شدن جاذب ارتعاشات توانسته دامنه ارتعاشات را در یک محدوده فرکانسی مشخص محدود یا حذف کند، ولی دو فرکانس رزونانس Ω1 و Ω2 ایجاد کرده که دامنه ماشین در این دو فرکانس به بینهایت میل میکند. در عمل و در کاربردهای واقعی باید محدوده فرکانس کاری را به اندازه کافی از دو فرکانس رزونانس Ω1 و Ω2 دور نگه داشت. برای یافتن مقدار این دو فرکانس، باید مخرج رابطه ۳ را برابر صفر قرار دهیم. اما پیش از آن به عبارت زیر دقت کنید.
رابطه بالا در واقع تابعی از (m2/m1) و (ω2/ω1) است. با دقت در رابطه بالا سه نتیجه مهم استخراج میشود.
فرکانسهای Ω1 و Ω2 به ترتیب از سرعت کاری ماشین (که با فرکانس طبیعی ω1 برابر است) کوچکتر و بزرگتر هستند. در نتیجه، موتور در حین راهاندازی و همینطور در هنگام توقف، حتماً از مقدار Ω1 عبور خواهد کرد. دامنه ارتعاشات در این نقطه خیلی زیاد خواهد بود.
از آنجایی که جاذب ارتعاشات برای یک فرکانس تحریک ω تنظیم میشود، دامنه حالت ماندگار ماشین فقط برای این فرکانس، برابر صفر است. اگر ماشین با فرکانسهای دیگر کار کند یا نیروی وارد به ماشین چند فرکانس داشته باشد، ممکن است دامنه ارتعاشات بزرگ شود.
تغییرات Ω1/ω2 و Ω2/ω2 به عنوان تابعی از m2/m1 و برای سه نسبت مختلف ω2/ω1 در شکل زیر رسم شده است. همانطور که مشاهده میکنید، اختلاف بین Ω1 و Ω2 با زیاد شدن مقدار m2/m1، افزایش یافته است.
مثال ۱: جاذب ارتعاشات برای موتور دیزل
سؤال: برای نگهداری یک موتور دیزل با وزن 3000N از یک تکیهگاه استفاده شده است. هنگامی که سرعت موتور به 6000rpm میرسد، ارتعاشات آن از طریق این تکیهگاه به محیط منتقل میشود. پارامترهای لازم برای یک جاذب ارتعاشات را طوری تعیین کنید که دامنه ارتعاشات را کاهش دهد. اندازه نیروی تحریک برابر 250N و دامنه حرکت جرم کمکی محدود به 2mm است.
پاسخ: ابتدا فرکانس ارتعاشات موتور را محاسبه میکنیم.
f=606000=100Hzω=628.32rad/s
از آنجایی که هدف این مسئله، صفر کردن دامنه حرکت تکیهگاه است، دامنه حرکت جرم کمکی باید با حرکت ناشی از نیروی تحریک مساوی و در خلاف جهت آن باشد. از رابطه شماره ۵ کمک میگیریم.
∣F0∣=m2ω2X2
با جایگذاری مقادیر معلوم، جرم کمکی و سپس سفتی فنر آن، به صورت زیر به دست میآید.
سؤال: شکل زیر، یک مجموعه موتور-ژنراتور را نشان میدهد که برای کار در بازه 2000rpm تا 4000rpm طراحی شده است. به دلیل وجود نابالانسی جزئی در روتور، دامنه ارتعاشات این سیستم در سرعت 3000rpm بسیار زیاد میشود. برای برطرف کردن این مشکل، پیشنهاد شده تا از یک جاذب ارتعاشات استفاده شود. بدین منظور و برای سرعت 3000rpm به جاذب ارتعاشات با جرم 2kg نیاز است. در این صورت، فرکانسهای طبیعی سیستم در سرعتهای 2500rpm و 3500rpm رخ میدهد. جرم و سفتی سیستم جاذب را طوری طراحی کنید که فرکانسهای طبیعی آن خارج از بازه عملکرد این مجموعه موتور -- ژنراتور قرار بگیرد.
فرکانسهای طبیعی مجموعه موتور -- ژنراتور و همچنین جاذب ارتعاشات به صورت زیر است.
ω1=m1k1ω2=m2k2
برای به دست آوردن فرکانسهای رزونانس Ω1 و Ω2 در سیستم نهایی، به رابطه ۶ برمیگردیم. از آنجایی که جرم جاذب برابر با m=2kg در نظر گرفته شده، رابطه ω1=ω2=314.16rad/s که متناظر با سرعت 3000rpm بوده، برقرار است.
μ=m1m2r1=ω2Ω1r2=ω2Ω2
حالا میتوانیم رابطه ۶ را به شکل ساده زیر بنویسیم.
r12,r22=(1+2μ)∓(1+2μ)2−1
میدانیم مقدار Ω1 برابر با 261.80rad/s (معادل 2500rpm) و مقدار Ω2 نیز برابر با 366.52rad/s (معادل 3500rpm) است.
با توجه به مقدار r1=0.8333، جوابهای زیر به دست میآید.
μ=m2/m1=0.1345m1=m2/0.1345=14.8699kg
حد پایین برای Ω1 برابر با 2000rpm (معادل 209.44rad/s) است.
r1=ω2Ω1=314.16209.44=0.6667
با به کار بردن این مقدار به دست آمده برای r1، میتوانیم مقادیر μ، m2 و فرکانس دوم رزونانس را تعیین کنیم.
r22=(1+2μ)+(1+2μ)2−1=2.2497
فرکانس متناظر با این مقدار برابر با Ω2=4499.4rpm است که اختلاف مناسبی هم با حد بالای سرعت یعنی 4000rpm دارد. اکنون میتوانیم سفتی فنر مربوط به جاذب ارتعاشات را نیز به دست آوریم.
k2=ω22m2=(314.16)2(10.3227)=1.0188×106N/m
جاذب ارتعاشات میرا
همانطور که تا به اینجا گفتیم، جاذب ارتعاشات نقطه ماکزیمم را در نمودار پاسخ ارتعاشی خنثی میکند ولی در عوض، دو نقطه ماکزیمم جدید معرفی میکند. بنابراین، هنگام راهاندازی و توقف، ماشین از نقطه ماکزیمم اول عبور کرده و نوسانات شدیدی را تجربه میکند.
دامنه ارتعاشات ماشین را میتوان با اضافه کردن جاذب ارتعاشات میرا کاهش داد. شکل زیر را در نظر بگیرید. معادله حرکت مربوط به هریک از دو جرم اصلی و کمکی به صورت زیر نوشته میشود.
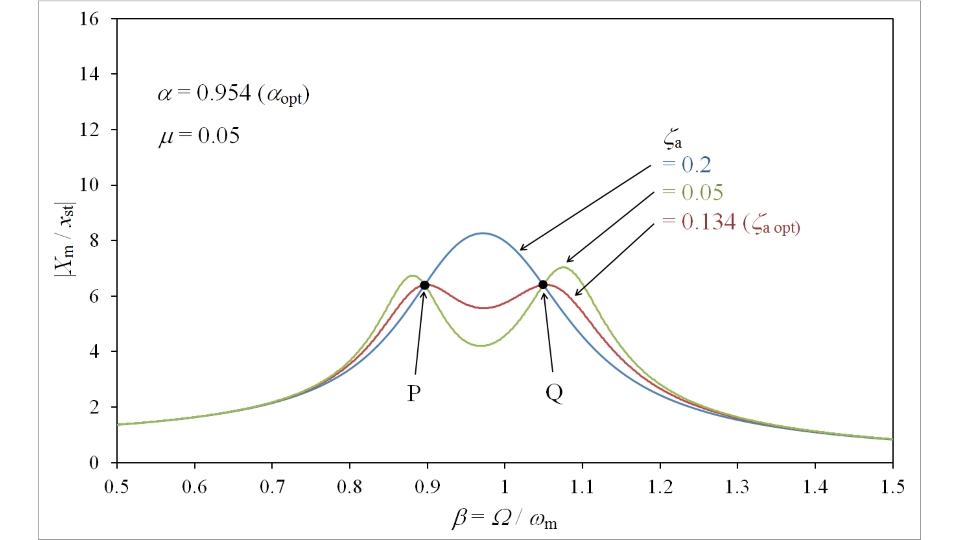
رابطه ۹ نشان میدهد که دامنه ارتعاشات جرم اصلی، تابعی از پارامترهای μ، f، g و ζ است. در شکل زیر، نمودار ∣δstX1∣ برحسب نسبت فرکانس اجباری برای مقادیر f=1 و μ=1/20 و چند مقدار مختلف از ζ رسم شده است.
اگر میرایی برابر صفر باشد (c2=ζ=0)، آنگاه در هر دو فرکانس رزونانس نامیرای مربوط به سیستم، رزونانس یا تشدید رخ خواهد داد. اگر مقدار میرایی به بینهایت برسد (ζ=∞)، سیستم مانند سیستم یک درجه آزادی با جرم [m1+m2=(21/20)m] و سفتی k1 رفتار میکند. در این حالت، رزونانس با دامنه X1→∞ و در نسبت فرکانس اجباری زیر اتفاق میافتد.
g=ωnω=1+μ1=0.9759
در هر دو حالت c2=0 و c2=∞، پیک نمودار X1 به بینهایت میل میکند. اما جایی بین این دو مقدار نیز، مینیمم X1 اتفاق خواهد افتاد. همانطور که در شکل قبل مشاهده کردید، صرف نظر از مقدار میرایی، تمام نمودارها از نقاط A و B عبور میکنند. با جایگذاری مقادیر c2=0 و c2=∞ در رابطه ۹ میتوانیم این نقاط را بیابیم.
g4−2g2(2+μ1+f2+μf2)+2+μ2f2=0
ریشههای این معادله، مقادیر نسبت فرکانس gA=ωA/ω و gB=ωB/ω متناظر با دو نقطه A و B هستند. عرض نقاط A و B را نیز میتوان با جایگذاری دو نسبت فرکانس اجباری به دست آمده در رابطه ۶ محاسبه کرد. بهینهترین جاذب ارتعاشات هنگامی به دست میآید که در آن، عرض نقاط A و B باهم برابر باشد. این حالت فقط در صورت برقراری رابطه زیر رخ میدهد.
f=1+μ1
(رابطه ۱۱)
با اینکه از رابطه بالا به عنوان مشخصه جاذب بهینه ارتعاشات نام برده میشود ولی باز هم مقدار بهینه نسبت میرایی ζ و مقدار X1/δst متناظر با آن مشخص نشده است. مقدار بهینه نسبت میرایی هنگامی به دست میآید که نمودار پاسخ X1/δst تا جایی که امکانپذیر است، در دو نقطه A و B هموار شود. شکل زیر را در نظر بگیرید. بدین منظور، ابتدا باید رابطه ۱۱ را با رابطه ۹ ادغام کنیم. پس از آن از رابطه ۹ اصلاح شده، نسبت به پارامتر gمشتق میگیریم تا شیب نمودار X1/δst به دست بیاید. سپس شیب نمودار را برابر با صفر قرار میدهیم تا مقادیر نسبت میرایی به دست بیاید. ابتدا مقدار نسبت میرایی را برای نقطه A و سپس برای نقطه B مشخص میکنیم.
ζA2=8(1+μ)3μ{3−μ+2μ}ζB2=8(1+μ)3μ{3+μ+2μ}
از میانگین دو مقدار بالا میتوانیم به عنوان نسبت میرایی بهینه در طراحی استفاده کنیم.
ζ optimal2=8(1+μ)33μ
از این رو، مقدار (δstX1) متناظر با نسبت میرایی بهینه به صورت زیر خواهد بود.
(δstX1)optimal=(δstX1)max=1+μ2
به عنوان نتیجهای از این بخش، موارد زیر را میتوان در نظر گرفت.
با دقت در رابطه 10 مشخص است که دامنه مربوط به جرم جاذب ارتعاشات یعنی X2 همیشه بزرگتر از دامنه جرم اصلی (X1) است. در نتیجه، در طراحی باید برای این مقادیر نیز پیشبینیهای لازم انجام شود.
از آنجایی که میدانیم دامنه m2 بزرگ خواهد بود، در طراحی سفتی فنر جاذب ارتعاشات (k2)، به موضوع خستگی هم باید دقت شود.
معمولاً در کاربردهای واقعی از جاذب ارتعاشات نامیرا استفاده میشود. اگر میرایی هم به جاذب اضافه شود، قابلیت جاذب ارتعاشات در حذف نوسانهای ناخواسته، تضعیف خواهد شد. در یک جاذب ارتعاشات میرا، دامنه نوسانهای جرم اصلی صفر نخواهد شد و فقط در شرایطی که باند فرکانسی عملکرد جاذب، باریک باشد، میرایی اضافه میشود.
اگر به مباحث مرتبط در زمینه مکانیک و ارتعاشات علاقهمند هستید، آموزشهای زیر به شما پیشنهاد میشوند:
شما در حال مطالعه نسخه آفلاین یکی از مطالب «مجله فرادرس» هستید. لطفاً توجه داشته باشید، ممکن است برخی از قابلیتهای تعاملی مطالب، مانند امکان پاسخ به پرسشهای چهار گزینهای و مشاهده جواب صحیح آنها، نمایش نتیجه آزمونها، پاسخ تشریحی سوالات، پخش فایلهای صوتی و تصویری و غیره، در این نسخه در دسترس نباشند. برای دسترسی به نسخه آنلاین مطلب، استفاده از کلیه امکانات آن و داشتن تجربه کاربری بهتر اینجا کلیک کنید.