



حاشیه فاز و حاشیه بهره – از صفر تا صد
در مباحث قبلی از مجله فرادرس به بررسی نحوه ترسیم نمودار بود پرداختیم. در مطلب نمودار بود به این نکته اشاره کردیم که در واقع نمودار بود یک سیستم کنترلی را میتوان به عنوان حاصل ضرب سه عامل یا فاکتور اساسی در نظر گرفت. در این مطلب قصد داریم به صورت عمیقتر ارتباط بین پایداری و پاسخ فرکانسی را بررسی کنیم. برای این کار لازم است دو مشخصه بسیار مهم در سیستمهای کنترلی را معرفی کنیم که «حاشیه بهره» (Gain Margin) و «حاشیه فاز» (Phase Margin) نام دارند. پس از مطالعه این مطلب قادر خواهیم بود مشخصههای پایداری یک سیستم حلقه بسته را از روی نمودار بود تابع تبدیل حلقه باز آن به دست آوریم. به عبارت دیگر میتوان گفت که با استفاده از دو معیار حاشیه بهره و حاشیه فاز، فاصله سیستم تا مرز ناپایداری مشخص میشود.



بررسی پایداری با استفاده از پاسخ فرکانسی
سیستم حلقه بسته زیر با فیدبک منفی واحد را در نظر بگیرید.

سوال بسیار مهمی که در اینجا به وجود میآید این است که بر اساس دانش ما از تابع تبدیل حلقه باز ، چگونه میتوان تصمیم گرفت که یک سیستم حلقه بسته برای یک مقدار مشخص، پایدار است.
در مطلب مکان هندسی ریشهها تا حدی به این سوال پاسخ دادیم. در واقع نقاط روی مکان هندسی ریشهها در معادله مشخصه زیر صدق میکنند:
اگر روی مکان هندسی ریشهها باشد، آنگاه با تطبیق دامنه و فاز 1- داریم:
روش دیگر این است که میتوانیم از نمودار بود استفاده کنیم. در واقع میتوانیم بنویسیم:
نمودار بود دامنه و فاز را فقط برای تابع تبدیل حلقه باز نشان میدهد که برای در ترسیم شده است. در حالی که مکان هندسی ریشهها، با استفاده از یک تابع تبدیل حلقه باز مسیر مختلط قطبهای حلقه بسته را به ازای پارامتر رسم میکند.
با استفاده از معیار راوث ـ هرویتز و نیز تکنیک مکان هندسی ریشهها میدانیم که زمانی که قطبهای حلقه بسته از سمت چپ به سمت راست محور موهومی حرکت کنند، سیستم حلقه بسته از حالت پایدار به حالت ناپایدار تغییر وضعیت میدهد و عکس این حالت نیز صادق است، یعنی با حرکت قطبهای حلقه بسته از سمت راست به سمت چپ محور موهومی، سیستم از ناپایداری به حالت پایدار تغییر وضعیت میدهد. به منظور برقراری یک ارتباط منطقی بین این گذارها و نمودار بود سیستم، چند گذار از محور موهومی را روی مکان هندسی ریشهها در نظر میگیریم. اگر به ازای یک مقدار خاص ، برخی از نقاط روی مکان هندسی ریشهها قرار بگیرند، آنگاه داریم:
بنابراین گذار یک سیستم از پایداری به ناپایداری را میتوان با استفاده از دو روش زیر تشخیص داد:
- از روی نمودار مکان هندسی، نقاط گذر از را پیدا کنیم.
- از روی نمودار بود و به ازای مقدار مشخص، فرکانسی را که در آن و است به دست آوریم.
مثال ۱
تابع تبدیل حلقه باز زیر را در نظر بگیرید:
در این سیستم میخواهیم مقدار بحرانی را به دست آوریم که مربوط به نقاط گذر از محور روی مکان هندسی ریشهها است و سپس مقدار فرکانس را بیابیم که دامنه و فاز متناظر با نقاط عبور از هستند که در قسمت اول به دست آوردیم.
حل
با استفاده از معادله فوق، معادله مشخصه متناظر با آن به صورت زیر به دست میآید:
شرط لازم و ضروری برای پایداری یک چندجملهای درجه سه به صورت زیر است:
بنابراین سیستم حلقه بسته پایدار است اگر و فقط اگر باشد. حال میخواهیم بدانیم از روی نمودار بود چه اطلاعاتی میتوانیم به دست آوریم. را به فرم بود بازنویسی میکنیم:
ابتدا دامنه را ترسیم میکنیم:
- فاکتور نوع اول دارای و است، بنابراین مجانب فرکانس پایین آن یک خط است که با شیب 1- از عبور میکند.
- فاکتور نوع سه قطبهای مختلط دارای نقطه شکست در است. در فرکانس شکست، شیب به اندازه ۲ واحد تندتر میشود.
- نرخ میرایی برابر است. بنابراین هیچ پیک رزونانس یا قله وجود ندارد.
«نمودار دامنه» (Magnitude Plot) مربوط به به ازای در تصویر زیر نشان داده شده است.
 " width="639" height="390">
" width="639" height="390">همچنین میدانیم که زمانی که باشد، دامنه به صورت زیر به دست میآید:
حال باید فاز را ترسیم کنیم. در این مورد فاز مستقل از است.
 " width="610" height="351">
" width="610" height="351">میدانیم که در ، مقدار است. در نتیجه در مقدار بحرانی دامنه برابر با و فاز برابر با در فرکانس است.
رابطه فرکانس عبور و پایداری
با توجه به مثال حل شده در بخش قبل، به نظر میرسد که گذار بین حالات پایداری و ناپایداری یا به عبارت دیگر نقاط گذر از به دامنه ۱ و فاز 180 - درجه ارتباط دارند. علاوه بر این، فرکانسی که در آن دامنه برابر با ۱ میشود، فرکانس گذار نام دارد و با نماد نشان داده میشود. با استفاده از نمودار دامنه در مثال قبل که به صورت زیر است:
" width="639" height="390">زمانی که روی نمودار بود یک سیستم از حالت پایدار به حالت ناپایدار عبور میکنیم، برای مقادیر بحرانی داریم:
تاثیر تغییر
توجه کنید که در اینجا یک اسکالر است و نباید آن را با بلوک کنترل کننده اشتباه گرفت. اگرچه ارتباطی با فاز ندارد، زمانی که تغییر کند، نمودار حول فرکانس عبور حرکت میکند.
در واقع میتوان گفت که به عنوان مثال:
- اگر را در ۲ ضرب کنیم، داریم:
در نتیجه نمودار دامنه به اندازه به سمت بالا شیفت مییابد.
- اگر را بر ۲ تقسیم کنیم، داریم:
در نتیجه نمودار دامنه به اندازه به سمت پایین شیفت مییابد.
بنابراین میتوان گفت با تغییر ، فرکانس عبور تغییر میکند، اما فاز ثابت باقی میماند. این مفهوم در تصویر زیر نشان داده شده است.
 " width="452" height="619">
" width="452" height="619">همان طور که در مثال ۱ بیان کردیم، روابط زیر صحیح هستند:
همین طور را به عنوان فرکانسی تعریف کردیم که در آن است. بنابراین در مثال ۱ داریم:
نکته مهمی که باید به خاطر داشته باشیم این است که همارزی فوق یک قاعده کلی نیست و شرایط بسته به سیستم ممکن است تغییر کند. گاهی اوقات برای رفع ابهام باید از مکان هندسی ریشهها یا نمودار نایکویست نیز کمک بگیریم. بنابراین لازم است که از دو مفهوم حاشیه بهره و حاشیه فاز نیز استفاده کنیم.
حاشیه بهره
سوالی که در این قسمت میخواهیم مطرح کنیم و در جستوجوی پاسخ آن هستیم این است که آیا میتوانیم از نمودار بود برای تعیین فاصله از پایداری استفاده کنیم؟
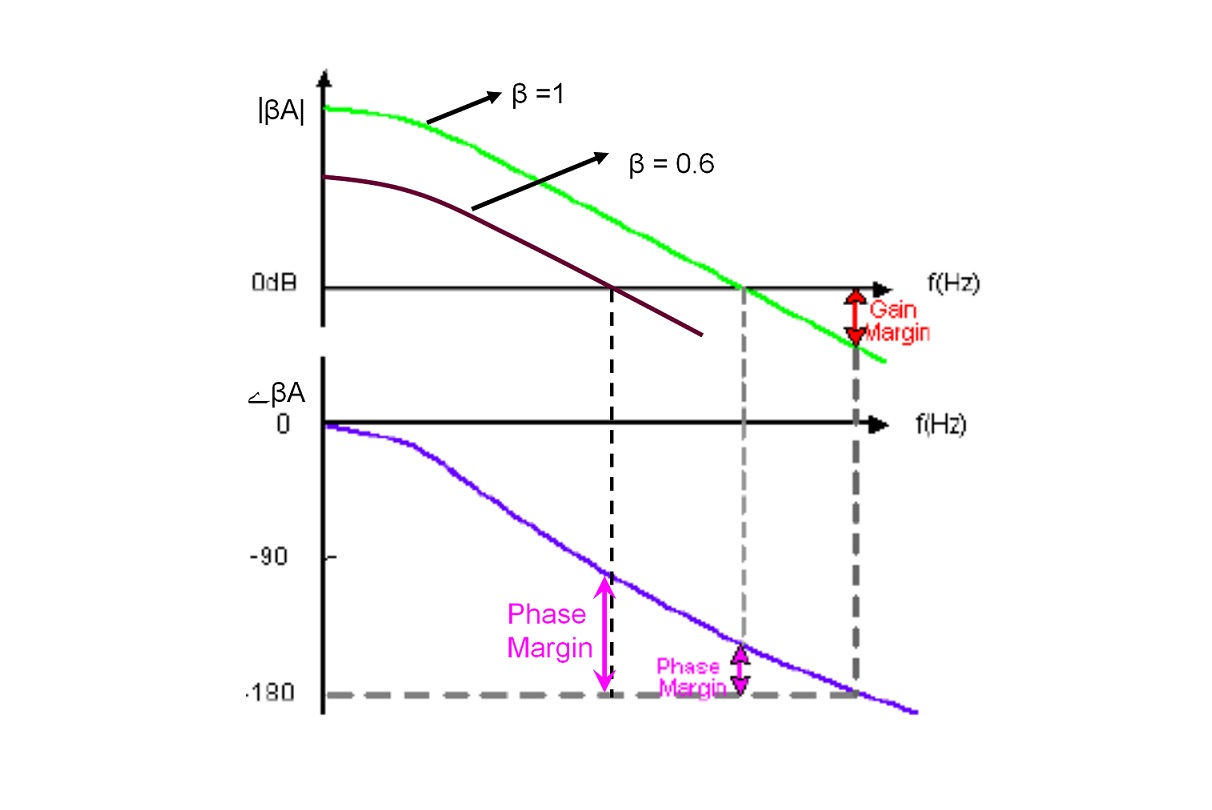
برای پاسخ دادن به این سوال، باید از دو پارامتر حاشیه بهره (GM) و حاشیه فاز (PM) استفاده کنیم. حاشیه بهره را به صورت فاکتوری تعریف میکنیم که میتوانیم را در آن ضرب کنیم، قبل از آن که به و برسیم. از آنجا که تغییر باعث تغییر نمیشود، در نتیجه برای به دست آوردن حاشیه بهره باید مقدار را در محاسبه کنیم. اگر مثال اول را به خاطر بیاوریم که در آن است، در محلی که (پایدار) باشد، حاشیه در نمودار دامنه زیر نشان داده است.

حال برای محاسبه حاشیه بهره باید مانند نمودار زیر عمل کنیم.

بر اساس این نمودار، است. در این فرکانس دامنه یا است. بنابراین حاشیه بهره برابر با ۲ به دست میآید.
حاشیه فاز
برای توضیح حاشیه فاز نیز مجددا از مثال ۱ در شرایط استفاده میکنیم که به صورت زیر است:
مقدار حاشیه فاز یا PM به صورت فاصله از فاز 180 درجه در فرکانس عبور یا گذر تعریف میشود. برای به دست آوردن حاشیه فاز، باید مقدار را در بررسی کنیم. در مورد مثال ۱، میتوانیم تصویر زیر را در رسم کنیم.

برای مثال ۱، در فرکانس عبور ، فاز برابر با است. بنابراین حاشیه فاز به صورت زیر به دست میآید:
در بسیاری از کاربردهای عملی، ممکن است لازم باشد که حاشیه فاز به صورت باشد.
مثال ۲
سیستم کنترلی با فیدبک منفی واحد به صورت زیر را در نظر بگیرید.
در این سیستم داریم:
مقدار حاشیه فاز و حاشیه بهره را با به دست آورید.
حل
مقدار بهره را در نظر میگیریم. در نتیجه تابع تبدیل حلقه باز به صورت زیر به دست میآید:
در رابطه فوق، تابع تبدیل از درجه دوم به دست آمده است. نشان خواهیم داد که حاشیه بهره برابر با بینهایت به دست می آید. رابطه زیر در مورد این سیستم صادق است:
نمودار فاز این سیستم در تصویر زیر نشان داده شده است.

با توجه به این نمودار میتوان دریافت که نمودار فاز از 90- درجه شروع میشود (فاکتور نوع ۱ با ) و سپس به اندازه 90- درجه رو به سمت پایین حرکت میکند (فاکتور نوع ۲ یک قطب). همان طور که گفتیم برای محاسبه حاشیه بهره نیاز است که ابتدا را پیدا کنیم. اما در اینجا چنین وجود ندارد. به عبارت دیگر، نمیتوان هیچ حاشیه بهرهای را به دست آورد و به همین دلیل میگوییم حاشیه بهره برابر با بینهایت است. نکته مهمی که وجود دارد این است که این وضعیت بدین معنا است که ما میتوانیم مقدار را افزایش دهیم، بدون این که سیستم ناپایدار شود. چند جملهای مشخصه درجه دوم مربوط به این سیستم به صورت زیر است:
این معادله همیشه به ازای و داده شده پایدار است. برای محاسبه حاشیه فاز، باید نمودار دامنه را ترسیم کنیم. با استفاده از معادله میتوانیم بنویسم:
- فاکتور نوع یک با ، منجر به یک مجانب فرکانس پایین با شیب 1- میشود.
- فاکتور نوع دوم باعث تند شدن شیب به اندازه ۱ هنگام عبور از نقطه شکست میشود.
نمودار دامنه از صفر دسیبل یا عبور میکند، در نتیجه یک فرکانس گذر محدود وجود دارد که در تصویر زیر مشخص شده است.

میتوان نشان داد که برای سیستم در این مثال داریم:
یک تقریب مفید برای این است که از استفاده کنیم. از مثال فوق میتوان به این نتیجه رسید که برای یک سیستم مرتبه دو داریم:
حاشیه فاز بزرگتر به معنی داشتن میرایی بهتر است. به همین دلیل میتوان مشخصه نرخ میرایی یک سیستم حلقه بسته را به مقدار حاشیه فاز سیستم حلقه باز مرتبط دانست. در نتیجه فراجهش و پیک رزونانس هر دو از طریق به حاشیه فاز مرتبط هستند.
ارتباط بهره و فاز در نمودار بود
تا این قسمت به بحث درباره پایداری یک سیستم بر اساس پاسخ فرکانسی آن پرداختیم. با استفاده از دو ابزار حاشیه بهره و حاشیه فاز روی نمودار بود میتوانیم بگوییم که چقدر از مرز ناپایداری سیستم فاصله داریم. در ادامه قصد داریم به بررسی ارتباط بین بهره و فاز در نمودار بود بپردازیم. از این ارتباط میتوان به عنوان یک راهنما در طراحی کنترل کنندهها با استفاده از پاسخ فرکانسی بهره برد. لازم است که از روی نمودار بود به تاثیر انواع مختلف کنترل کنندهها روی عملکرد حلقه بسته پی ببریم. پیکربندی حلقه بسته با فیدبک منفی واحد به صورت زیر است.
فرض کنید مینیمم فاز باشد. به عبارت دیگر هیچ صفری در سمت راست صفحه نداشته باشد.
در مورد ترسیم نمودار بود میتوان به جدول زیر مراجعه کرد که به صورت خلاصه بیان شده است.
| صفر/قطب حقیقی | صفر/قطب حقیقی | فرکانسهای پایین | |
| بالا رفتن/پایین آمدن به اندازه ۲ | بالا رفتن/پایین آمدن به اندازه ۱ | دامنه (شیب) | |
| بالا رفتن/پایین آمدن به اندازه ۱۸۰ درجه | بالا رفتن/پایین آمدن به اندازه ۹۰ درجه | فاز |
میتوان ارتباط بهره و فاز را به این صورت خلاصه کرد که در فواصل به اندازه کافی دور از نقطه شکست، داریم:
از این رابطه میتوان قواعد سرانگشتی زیر را نتیجه گرفت:
- اگر دارای شیب 2- در باشد، با استفاده از رابطه بهره و فاز فوق میتوان نوشت . بنابراین حاشیه فاز وجود ندارد.
- اگر دارای شیب 1- در باشد، با استفاده از رابطه بهره و فاز فوق میتوان نوشت . بنابراین حاشیه فاز برابر با $$ \color { blue } { { \rm PM } = 9 0 ^ \circ } $$
رابطه بهره و فاز به عنوان یک راهنما برای طراحی نمودار بود در تصویر زیر نشان داده شده است.

ملاحظات مشابهی ممکن است برای نمودار دامنه با شیب مثبت نیز در نظر گرفته شود که بستگی به تابع انتقال سیستم دارد.
رابطه بین بهره و فاز و پهنای باند سیستم
با توجه به راهنمای طراحی فوق، زمانی که حاشیه فاز برابر با ۹۰ درجه باشد، میتوان نوشت:
با پیکربندی فیدبک منفی واحد در سیستم نشان داده شده در تصویر اول، میتوانیم تابع انتقال سیستم حلقه بسته را در محاسبه کنیم.
آنگاه داریم:
به یاد داشته باشید که در زمانی که ، اگر یک فاکتور نوع اول وجود داشته باشد، آنگاه داریم:
رابطه بین فرکانس عبور و پهنای باند به صورت زیر است:
- اگر باشد، آنگاه .
- اگر باشد، آن گاه .
اگر این مطلب برای شما مفید بوده است، آموزشهای زیر نیز به شما پیشنهاد میشوند:
- مجموعه آموزشهای دروس مهندسی کنترل
- آموزش کنترل خطی با رویکرد حل مساله
- مجموعه آموزشهای مهندسی برق
- آموزش سیستم های کنترل خطی
- معیار پایداری راث هرویتز — به زبان ساده
- جبران ساز پیش فاز و پس فاز — از صفر تا صد
- پاسخ سیستم مرتبه دوم — از صفر تا صد
^^











فقط آقای زندی کارشون عالیه , فیلم هم دارن
سلام پ فیلمش کو؟