شما در حال مطالعه نسخه آفلاین یکی از مطالب «مجله فرادرس» هستید. لطفاً توجه داشته باشید، ممکن است برخی از قابلیتهای تعاملی مطالب، مانند امکان پاسخ به پرسشهای چهار گزینهای و مشاهده جواب صحیح آنها، نمایش نتیجه آزمونها، پاسخ تشریحی سوالات، پخش فایلهای صوتی و تصویری و غیره، در این نسخه در دسترس نباشند. برای دسترسی به نسخه آنلاین مطلب، استفاده از کلیه امکانات آن و داشتن تجربه کاربری بهتر اینجا کلیک کنید.
همانگونه که میبینیم، باز هم با معادلهای مواجه خواهیم بود که نوسانهای میرا را نشان میدهد. بنابراین، مد نوسانی در مدار RLC سری نیز رخ میدهد.
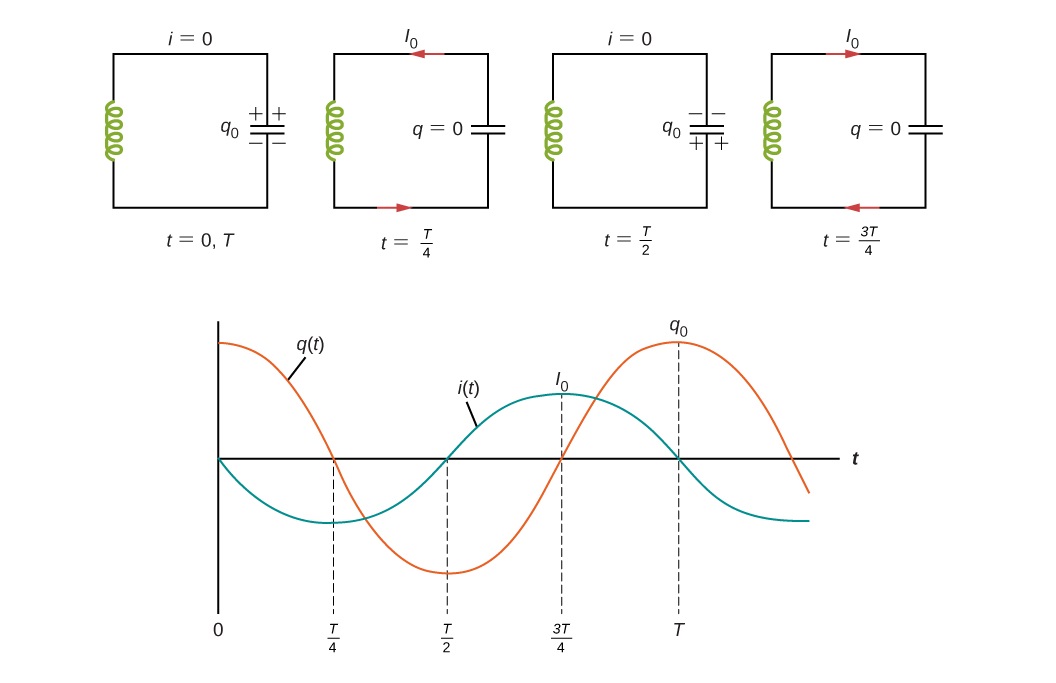
مدار رزونانس یا تشدید (فرمول تامسون)
در سادهترین حالت، وقتی مقاومت اهمی صفر باشد (R=0) و منبع emf حذف شود (E=0)، مدار رزونانس، فقط از خازن C و سلف L تشکیل میشود و با معادله دیفرانسیل زیر توصیف میشود:
که در آن، β=2LR ضریب میرایی و ω0 فرکانس رزونانس مدار است.
بسته به مقادیر R، L و C سه حالت مختلف داریم.
حالت ۱: فرامیرا (R2>C4L)
در این حالت، هر دو ریشه معادله مشخصه λ1 و λ2 حقیقی، مجزا و منفی هستند. پاسخ عمومی معادله دیفرانسیل به صورت زیر است:
I(t)=C1eλ1t+C2eλ2t.
در این مورد، جریان به صورت یکنوا به صفر میل میکند (شکل ۳).
شکل ۳
حالت ۲: میرای بحرانی (R2=C4L)
این حالت، مرزی یا بحرانی نامیده میشود. در اینجا، ریشههای معادله مشخصه، برابر، حقیقی و منفی هستند. جواب عمومی این حالت، به صورت زیر است:
I(t)=(C1t+C2)e–βt=(C1t+C2)e–2LRt.
در ابتدا، جریان ممکن است حتی افزایش نیز پیدا کند، اما به سرعت به صورت نمایی کاهش پیدا میکند.
حالت ۳: فرومیرا (R2<C4L)
در این حالت، ریشههای معادله مشخصه مزدوج مختلط هستند و منجر به نوسانهای میرا در مدار میشوند. جریان به صورت زیر به دست میآید:
I(t)=e–βt(Acosωt+Bsinωt)
که در آن، β=2LR ضریب میرایی، و ω=LC1–(2LR)2 فرکانس نوسان، و A و B ثابتهای انتگرالگیری هستند و به شرایط اولیه بستگی دارد. توجه کنید که فرکانس ω کمتر از فرکانس ω0 رزونانس مدار است. شکل عمومی منحنی I(t) در این حالت، در شکل ۳ نشان داده شده است.
نوسانهای اجباری و رزونانس
اگر مدار رزونانس یا تشدید، شامل یک منبع با emf متغیر متناوب باشد، نوسانهای متناوب در سیستم به وجود میآید. اگر نیروی محرکه الکتریکی E منبع متغیر به صورت زیر باشد:
آنگاه معادله دیفرانسیل نوسانهای اجباری در مدار RLC سری را میتوان به صورت زیر نوشت:
dt2d2q(t)+LRdtdq(t)+LC1q(t)=L1E0cosωt
یا
dt2d2q+2βdtdq+ω02q=LE0cosωt
که در آن، q بار خازن است. همچنین تساویهای 2β=LR و ω02=LC1 نیز برقرارند.
معادله بالا، متناظر با معادله نوسان اجباری یک جسم متصل به فنر است. جواب این معادله، از مجموع جواب عمومی و جواب خصوصی معادله ناهمگن تشکیل میشود. بخش اول، کاهش گذرا است و بعدی، فقط به نیروی خارجی اعمال شده بر مدار بستگی دارد.
که در آن، θ=–(φ+2π). زاویه θ جابهجایی فاز نوسانهای جریان I(t) را نسبت به نوسانات منبع ولتاژ E(t)=E0cosωt نشان میدهد.
دامنه جریان (I0) و جابهجایی فاز (θ) برابرند با:
I0θ=R2+(ωL–ωC1)2E0=ZE0,=arctanRωL–ωC1.
کمیت R2+(ωL–ωC1)2، امپدانس یا امپدانس مدار نامیده میشود. امپدانس، از مقاومت اهمی R و راکتانس ωL–ωC1 تشکیل میشود. امپدانس مدار رزونانس، به فرم مختلط به صورت زیر نوشته میشود:
Z=R+i(ωL–ωC1).
با توجه به فرمولهای بالا، میتوان دریافت که دامنه نوسان حالت ماندگار، وقتی ماکزیمم است که داشته باشیم:
ωL=ωC1⇒ω=ω0=LC1.
در این شرایط، رزونانس در مدار رخ میدهد. فرکانس رزونانس ω0 برابر با فرکانس نوسانهای آزاد در مدار است و به مقاومت R بستگی دارد.
میتوانیم فرمول دامنه نوسانهای اجباری را برای به دست آوردن یک وابستگی صریح به نسبت فرکانس ω0ω تبدیل کنیم که در آن، ω0 فرکانس رزونانس است. در نتیجه، داریم:
وابستگی دامنه جریان به نسبت فرکانس ω0ω برای مقادیر مختلف r و c در شکلهای 4 و 5 نشان داده شده است. این منحنیها برای پارامترهای E=100V، L=1mH، C=10μF (شکل ۴) و R=10ohms (شکل ۵)، رسم شدهاند.
شکل ۴شکل ۵
ویژگیهای رزونانسی یک مدار، با ضریب کیفیت Q مشخص میشوند که مقدار عددی آن برابر با نسبت فرکانس رزونانس ω0 به پهنای Δω مربوط به منحنی رزونانس در 21 حداکثر مقدار است (شکل ۶).
یک مدار الکتریکی از ترکیب سری مقاومت R=100ohms و پیچهای با اندوکتانس L=50H تشکیل شده است. در لحظه t=0، یک منبع DC با ولتاژ V0=200V به مدار متصل میکنیم. موارد زیر را به دست آورید:
جریان I(t) مدار؛
ولتاژ دو سر مقاومت VR(t) و ولتاژدو سر سلف VL(t).
حل:مدار RL سری، با معادله دیفرانسیل زیر توصیف میشود:
LdtdI+RI=V0.
همانطور که میدانیم، پاسخ این معادله، به صورت مجموع پاسخ عمومی معادله همگن I0 و پاسخ خصوصی معادله ناهمگن I1 است. جواب عمومی معادله
LdtdI+RI=0
به صورت زیر است:
I0(t)=Ae–LRt
که در آن، A ثابت انتگرالگیری است.
جواب معادله ناهمگن I1 متناظر با حالت ماندگار است که در آن، جریان مدار فقط با مقاومت اهمی R و به صورت I1=RV0 تعیین میشود. در نتیجه، معادله نهایی جریان به صورت زیر خواهد بود:
I(t)=I0+I1=Ae–LRt+RV0.
ثابت A را میتوان با استفاده از شرایط اولیه I(t=0)=0 تعیین کرد. در نتیجه، داریم:
0=Ae–LR⋅0+RV0,⇒A=–RV0.
بنابراین، پس از آنکه مدار بسته شود، جریان گذرنده از آن به صورت زیر به دست میآید:
ولتاژ VR مقاومت و ولتاژ VL سلف با معادلات زیر به دست میآیند:
$$ \large \begin {align*}<br />
{ V _ R } \left ( t \right ) & = I \left ( t \right ) R = { { V _ 0 } \left ( { 1 – { e ^ { – \frac { R } { L } t } } } \right ) } = { 2 0 0 \left ( { 1 – { e ^ { – 2 t } } } \right ) \; \left [ \text {V} \right ],} \\<br />
\require {cancel} { V _ L } \left ( t \right ) & = L \frac { { d I \left ( t \right ) } } { { d t } } = { \frac { { L { V _ 0 } } } { R } \frac { d } { { d t } } \left ( { 1 – { e ^ { – \frac { R } { L } t } } } \right ) } \\ & = { \frac { { \cancel { L } { V _ 0 } } } { \cancel { R } } \cdot \frac { \cancel { R } } { \cancel { L } } { e ^ { – \frac { R } { L } t } } } = { { V _ 0 } { e ^ { – \frac { R } { L } t } } } = { 2 0 0 { e ^ { – 2 t } } \; \left [ \text {V} \right ] . }<br />
\end {align*} $$
منحنیهای توابع VR(t) و VL(t) در شکل ۸ نشان داده شدهاند.
شکل ۸
مثال ۲
یک مدار الکتریکی، از مقاومت R=100ohms سری با خازن C=0.01μF تشکیل شده است. در لحظه اولیه، منبع DC با ولتاژ V0=200V به مدار متصل میشود. موارد زیر را به دست آورید:
جریان I(t) مدار؛
ولتاژ دو سر مقاومت VR(t) و ولتاژ دو سر خازن VC(t).
حل: این مثال، مشابه مثال قبل است؛ با این تفاوت که نوع مدار فرق میکند و در اینجا یک مدار RC داریم.
که در آن، A ثابت انتگرالگیری است و به شرایط اولیه مدار بستگی دارد.
در اینجا، جواب خصوصی معادله ناهمگن متناظر با شرایط حالت ماندگار dtdVC=0 است. در نتیجه، ولتاژ دو سر مقاومت برابر با صفر خواهد بود و همه ولتاژ به خازن اعمال میشود: VC=V0. بنابراین، ولتاژ خازن را میتوان به صورت زیر نوشت:
VC(t)=Ae–RCt+V0.
برای شرایط اولیه VC(t=0)=0، ثابت A به صورت زیر به دست میآید:
منحنیهای VC(t)، VR(t) و I(t) در شکلهای ۹ و ۱۰ نشان داده شدهاند.
شکل ۹شکل ۱۰
مثال ۳
یک مدار الکتریکی، از مقاومت R=1ohms سری با سلف L=0.25H و خازن C=1μF تشکیل شده است. قبل از آنکه دامنه جریان با ضریب e کاهش یابد، چه تعداد نوسان انجام شده است؟
حل: در این مدار، نوسانهای میرا با فرکانس زیر رخ میدهد:
ω=LC1–4L2R2.
دامنه نوسانها به صورت زیر کاهش مییابد:
A(t)=A0e–2LRt.
فرض کنید N نوسان کامل در مدت زمان t رخ دهد:
t=NT=ω2πN=LC1–4L2R22πN.
اگر دامنه به اندازه e کاهش یابد، معادله زیر را خواهیم داشت:
–2LRt=2LR⋅LC1–4L2R22πN=–1.
در نتیجه، تعداد نوسانها به صورت زیر به دست میآید:
یک منبع AC را با دامنه E0=128V و فرکانس ω=250Hz به یک مدار سری شامل مقاومت R=100ohms، سلف L=0.4H و خازن C=200μF متصل شده است. موارد زیر را به دست آورید:
دامنه جریان مدار؛
دامنه ولتاژ روی خازن.
حل: نوسانهای جریان در حالت ماندگار اتفاق میافتد و دامنه آن، برابر است با:
سید سراج حمیدی دانشآموخته مهندسی برق است و به ریاضیات و زبان و ادبیات فارسی علاقه دارد. او آموزشهای مهندسی برق، ریاضیات و ادبیات مجله فرادرس را مینویسد.
شما در حال مطالعه نسخه آفلاین یکی از مطالب «مجله فرادرس» هستید. لطفاً توجه داشته باشید، ممکن است برخی از قابلیتهای تعاملی مطالب، مانند امکان پاسخ به پرسشهای چهار گزینهای و مشاهده جواب صحیح آنها، نمایش نتیجه آزمونها، پاسخ تشریحی سوالات، پخش فایلهای صوتی و تصویری و غیره، در این نسخه در دسترس نباشند. برای دسترسی به نسخه آنلاین مطلب، استفاده از کلیه امکانات آن و داشتن تجربه کاربری بهتر اینجا کلیک کنید.