در آموزشهای قبلی مجله فرادرس ، مدل تکفاز ، سه فاز و موج سیار خط انتقال را معرفی کردیم. در این آموزش، مدل حالت ماندگار یا مدل پارامتر توزیع شده خط را بررسی میکنیم. حالت ماندگار به این معنی است که ولتاژ و جریان خط ماندگار بوده و با زمان تغییر نمیکنند.
مدل پارامتر توزیع شده خط تکفاز
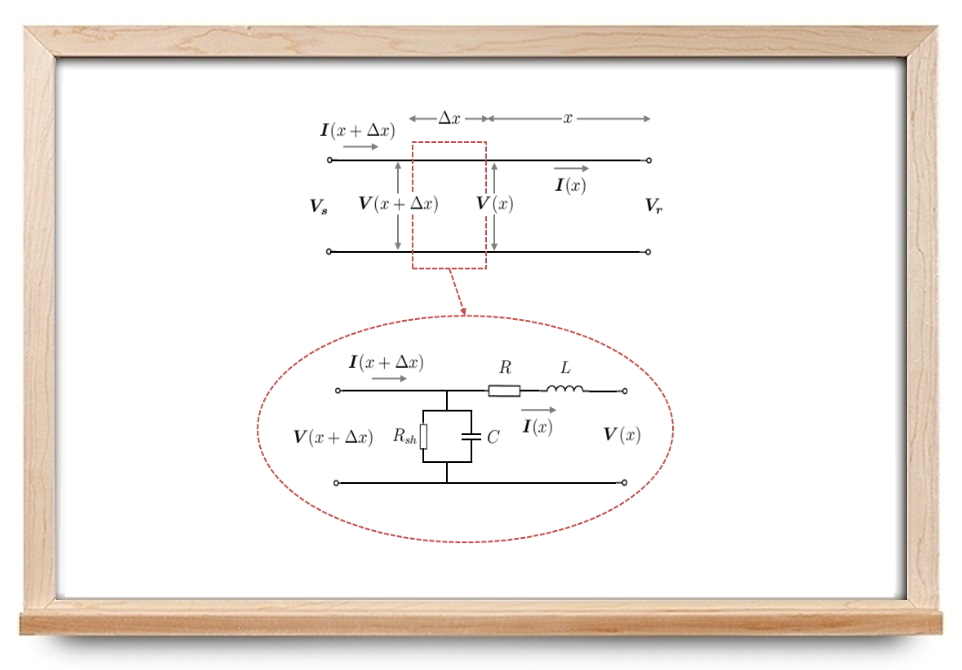
شکل زیر مدل پارامتر توزیع شده تکفاز را نشان میدهد.
شکل ۱: مدل پارامتر توزیع شده خط (تکفاز): نمایش کلی خط (بالا)؛ مدل برای یک بخش کوچک از خط (پایین) در یک خط انتقال واقعی، عناصر R R R L L L C C C Δ x \Delta x Δ x x x x
نمودار بالایی شکل ۱ خط انتقال کامل و بخش کوچکی از خط را نشان میدهد که به دور آن خطچین رسم شده است. نمودار پایینی یک نمای دقیقتر از بخش مورد نظر خط است که یک مدل مرسوم با عناصر سری و موازی را برای بخشی از خط نشان میدهد. عناصر سری را میتوان با یک امپدانس و عناصر موازی را با یک ادمیتانس به صورت زیر نمایش داد:
z = R + j ω L = R + j X \large \boldsymbol { z } = R + j \omega L = R + j X \, z = R + jω L = R + j X
y = 1 R s h + j ω C = G + j B \large \boldsymbol { y } = \frac { 1 } { R _ { s h } } + j \omega C = G + j B \, y = R s h 1 + jω C = G + j B
که در آن، R R R Ω / m \Omega /m Ω/ m X X X راکتانس سری (Ω / m \Omega /m Ω/ m G G G S / m S /m S / m B B B سوسپتانس موازی (S / m S /m S / m
لازم به ذکر است که مقادیر امپدانس و ادمیتانس برای هر متر بیان میشوند. بنابراین، امپدانس سری بخشی از خط به طول Δ x \Delta x Δ x z Δ x \boldsymbol{z} \Delta x \, z Δ x
استخراج معادلات ولتاژ و جریان
با تحلیل مدار با استفاده از KVL ، میتوان نوشت:
V ( x + Δ x ) = V ( x ) + z Δ x I ( x ) \large \boldsymbol { V } ( x + \Delta x ) = \boldsymbol { V } ( x ) + \boldsymbol { z } \Delta x \boldsymbol { I } ( x ) \, V ( x + Δ x ) = V ( x ) + z Δ x I ( x )
اگر معادله بالا را بازنویسی کنیم، داریم:
V ( x + Δ x ) − V ( x ) Δ x = z I ( x ) \large \frac { \boldsymbol { V } ( x + \Delta x ) - \boldsymbol {V } ( x ) } { \Delta x } = \boldsymbol { z } \boldsymbol { I } ( x ) \, Δ x V ( x + Δ x ) − V ( x ) = z I ( x )
معادله سمت چپ خارج قسمت تفاضلی نیوتن نامیده میشود و وقتی Δ x → 0 \Delta x \to 0 Δ x → 0 V ( x ) \boldsymbol{V}(x) V ( x )
lim Δ x → 0 V ( x + Δ x ) − V ( x ) Δ x = d V ( x ) d x = z I ( x ) \large \lim _ { \Delta x \to 0 } \frac { \boldsymbol { V } ( x + \Delta x ) - \boldsymbol { V } ( x ) } { \Delta x } = \frac { d \boldsymbol { V } ( x ) } { d x} = \boldsymbol { z } \boldsymbol { I } ( x ) \, Δ x → 0 lim Δ x V ( x + Δ x ) − V ( x ) = d x d V ( x ) = z I ( x )
به طور مشابه، با تحلیل KCL مدار خواهیم داشت:
I ( x + Δ x ) = I ( x ) + y Δ x V ( x + Δ x ) \large \boldsymbol { I } ( x + \Delta x ) = \boldsymbol { I } ( x ) + \boldsymbol { y } \Delta x \boldsymbol { V } ( x + \Delta x ) \, I ( x + Δ x ) = I ( x ) + y Δ x V ( x + Δ x )
اگر این معادله را بازنویسی کنیم، داریم:
I ( x + Δ x ) − I ( x ) Δ x = y V ( x + Δ x ) \large \frac { \boldsymbol { I } ( x + \Delta x ) - \boldsymbol { I } ( x ) } { \Delta x } = \boldsymbol { y } \boldsymbol { V } ( x + \Delta x ) \, Δ x I ( x + Δ x ) − I ( x ) = y V ( x + Δ x )
حال حد Δ x → 0 \Delta x \to 0 Δ x → 0
d I ( x ) d x = y V ( x ) ( 2 ) \large \frac{d \boldsymbol{I}(x)}{dx} = \boldsymbol{y} \boldsymbol{V}(x) \, \; \; \; \; \; ( 2 ) d x d I ( x ) = y V ( x ) ( 2 )
با مشتقگیری از معادلات (۱) و (۲)، داریم:
d 2 V ( x ) d x 2 = z d I ( x ) d x \large \frac { d ^ { 2 } \boldsymbol { V } ( x) } { d x ^ { 2 } } = \boldsymbol { z } \frac { d \boldsymbol { I } ( x ) } { d x} \, d x 2 d 2 V ( x ) = z d x d I ( x )
d 2 I ( x ) d x 2 = y d V ( x ) d x \large \frac { d ^ { 2 } \boldsymbol { I } ( x ) } { dx ^ { 2 } } = \boldsymbol { y } \frac { d \boldsymbol { V } ( x ) } { d x } \, d x 2 d 2 I ( x ) = y d x d V ( x )
حال میتوانیم معادلات بالا را به صورت زیر بنویسیم:
d 2 V ( x ) d x 2 = z y V ( x ) ( 3 ) \large \frac { d ^ { 2 } \boldsymbol { V } ( x ) } { d x^ { 2 } } = \boldsymbol { z y } \boldsymbol { V } ( x ) \, \;\; \; \; \; ( 3 ) d x 2 d 2 V ( x ) = zy V ( x ) ( 3 )
d 2 I ( x ) d x 2 = z y I ( x ) ( 4 ) \large \frac { d ^ { 2} \boldsymbol { I } ( x ) } { d x ^ { 2 }} = \boldsymbol { z y } \boldsymbol { I } ( x ) \, \; \; \; \; \; ( 4 ) d x 2 d 2 I ( x ) = zy I ( x ) ( 4 )
دو معادله بالا را میتوان به فرم دستگاه معادلات خطی مرتبه دوم همگن نوشت:
d 2 V ( x ) d x 2 − z y V ( x ) = 0 \large \frac { d ^ { 2 } \boldsymbol { V } ( x )} { d x ^ { 2 } } - \boldsymbol { z y } \boldsymbol { V } ( x ) = 0 \, d x 2 d 2 V ( x ) − zy V ( x ) = 0
جواب عمومی این معادله دیفرانسیل برابر است با:
V ( x ) = A 1 e γ x + A 2 e − γ x \large \boldsymbol { V } ( x ) = A _ { 1 } e ^ { \boldsymbol { \gamma } x } + A _ { 2 } e ^ { - \boldsymbol { \gamma } x } \, V ( x ) = A 1 e γ x + A 2 e − γ x
که در آن، γ = z y \boldsymbol{\gamma} = \sqrt{\boldsymbol{zy}} γ = zy m − 1 \text{m}^ {-1} m − 1
با قرار دادن جواب در معادله (۱)، میتوان I ( x ) \boldsymbol{I}(x) I ( x )
d d x [ A 1 e γ x + A 2 e − γ x ] = z I ( x ) \large \frac { d } { d x } \left[ A _ { 1 } e ^ { \boldsymbol { \gamma } x } + A _ { 2 } e ^ { - \boldsymbol { \gamma } x } \right] = \boldsymbol { z } \boldsymbol { I } ( x ) \, d x d [ A 1 e γ x + A 2 e − γ x ] = z I ( x )
⇒ I ( x ) = A 1 e γ x − A 2 e − γ x Z c \large \Rightarrow \boldsymbol { I } ( x ) = \frac { A _ { 1 } e ^ { \gamma x } - A _ { 2 } e ^ { - \gamma x } }{ \boldsymbol { Z } _ { c } } \, ⇒ I ( x ) = Z c A 1 e γ x − A 2 e − γ x
که در آن، Z c = z y \boldsymbol{Z}_{c} = \sqrt{\boldsymbol{\frac{z}{y}}} Z c = y z Ω \Omega Ω
میتوانیم معادله بالا را برای ثوابت A 1 A_1 A 1 A 2 A _ 2 A 2 x = 0 x = 0 \, x = 0 V ( 0 ) = V r \boldsymbol{V}(0) = \boldsymbol{V_{r}} \, V ( 0 ) = V r I ( 0 ) = I r \boldsymbol{I}(0) = \boldsymbol{I_{r}} \, I ( 0 ) = I r
A 1 = V r + I r Z c 2 \large A _ { 1 } = \frac { \boldsymbol { V _ { r } } + \boldsymbol { I _ { r } } \boldsymbol { Z } _ { c } } { 2 } \, A 1 = 2 V r + I r Z c
A 2 = V r − I r Z c 2 \large A _ { 2 } = \frac { \boldsymbol { V _ { r } } - \boldsymbol { I _ { r } } \boldsymbol { Z } _ { c } } { 2 } \, A 2 = 2 V r − I r Z c
با جایگذاری این ثوابت معادلات پارامترهای توزیع شده خط را به دست میآوریم:
V ( x ) = ( V r + I r Z c 2 ) e γ x + ( V r − I r Z c 2 ) e − γ x ( 5 ) \large \boldsymbol { V } ( x ) = \left ( \frac { \boldsymbol { V _ { r } } + \boldsymbol { I _ { r } } \boldsymbol { Z } _ { c } } { 2 } \right) e ^ { \boldsymbol { \gamma } x } + \left ( \frac { \boldsymbol { V _ { r } } - \boldsymbol { I _ { r } } \boldsymbol { Z } _ { c } } { 2 } \right ) e ^ { - \boldsymbol { \gamma } x } \, \; \; \; \; \; (5) V ( x ) = ( 2 V r + I r Z c ) e γ x + ( 2 V r − I r Z c ) e − γ x ( 5 )
I ( x ) = ( V r + I r Z c 2 Z c ) e γ x − ( V r − I r Z c 2 Z c ) e − γ x ( 6 ) \large \boldsymbol { I } ( x ) = \left ( \frac { \boldsymbol { V _ { r } } + \boldsymbol { I _ { r } } \boldsymbol { Z } _ { c } } { 2 \boldsymbol { Z } _ { c } } \right ) e ^ { \gamma x } - \left ( \frac { \boldsymbol { V _ { r } } - \boldsymbol { I _ { r} } \boldsymbol { Z } _ { c } } { 2 \boldsymbol { Z } _ { c } } \right ) e ^ { - \gamma x } \, \; \; \; \; \; (6) I ( x ) = ( 2 Z c V r + I r Z c ) e γ x − ( 2 Z c V r − I r Z c ) e − γ x ( 6 )
فرم هیپربولیک معادلات خط انتقال
معادلات (۵) و (۶) را میتوان به صورت زیر بازنویسی کرد:
V ( x ) = ( e γ x + e − γ x 2 ) V r + Z c ( e γ x − e − γ x 2 ) I r \large \boldsymbol { V } ( x ) = \left ( \frac { e ^ { \boldsymbol { \gamma } x } + e ^ { - \boldsymbol { \gamma } x } } { 2 } \right ) \boldsymbol { V _ { r} } + \boldsymbol { Z } _ { c } \left ( \frac { e ^ { \boldsymbol { \gamma } x } - e ^ { - \boldsymbol { \gamma } x } } { 2 } \right ) \boldsymbol { I _ { r } } V ( x ) = ( 2 e γ x + e − γ x ) V r + Z c ( 2 e γ x − e − γ x ) I r
I ( x ) = 1 Z c ( e γ x − e − γ x 2 ) V r + ( e γ x + e − γ x 2 ) I r \large \boldsymbol { I } ( x ) = \frac { 1 } { \boldsymbol { Z } _ { c} } \left ( \frac { e ^ { \boldsymbol { \gamma } x } - e ^ { -\boldsymbol { \gamma} x } } { 2 } \right ) \boldsymbol { V _ { r } } + \left ( \frac { e ^ { \boldsymbol { \gamma } x } + e ^ { -\boldsymbol { \gamma } x } } { 2 } \right ) \boldsymbol { I _ { r } } I ( x ) = Z c 1 ( 2 e γ x − e − γ x ) V r + ( 2 e γ x + e − γ x ) I r
فرم نمایی توابع هیپربولیک sinh x \sinh x sinh x cosh x \cosh x cosh x
sinh x = e x − e − x 2 \large \sinh x = \frac { e ^ { x } - e ^ { - x } } { 2 } sinh x = 2 e x − e − x
cosh x = e x + e − x 2 \large \cosh x = \frac { e ^ { x } + e ^ { - x } } { 2 } cosh x = 2 e x + e − x
میتوانیم از این روابط استفاده کنیم و معادلات خط انتقال را به فرم هیپربولیک بنویسیم:
V ( x ) = cosh ( γ x ) V r + Z c sinh ( γ x ) I r \large \boldsymbol { V } ( x ) = \cosh ( \boldsymbol { \gamma } x ) \boldsymbol { V _ { r } } + \boldsymbol { Z } _ { c } \sinh ( \boldsymbol { \gamma } x ) \boldsymbol { I _ { r } } V ( x ) = cosh ( γ x ) V r + Z c sinh ( γ x ) I r
I ( x ) = 1 Z c sinh ( γ x ) V r + cosh ( γ x ) I r \large \boldsymbol { I } ( x ) = \frac { 1 } { \boldsymbol { Z } _ { c } } \sinh ( \boldsymbol { \gamma } x ) \boldsymbol { V _ { r } } + \cosh ( \boldsymbol { \gamma } x ) \boldsymbol { I _ { r } } I ( x ) = Z c 1 sinh ( γ x ) V r + cosh ( γ x ) I r
برای خطی به طول l l l پارامترهای ABCD معادلات بالا را میتوان به فرم ماتریسی زیر نوشت:
[ V s I s ] = [ cosh ( γ l ) Z c sinh ( γ l ) 1 Z c sinh ( γ l ) cosh ( γ l ) ] [ V r I r ] \large \left[ \begin {matrix} \boldsymbol { V _ { s } } \\ \\ \boldsymbol { I _ { s } } \end {matrix} \right ] = \left [ \begin {matrix} \cosh ( \boldsymbol { \gamma } l ) & \boldsymbol { Z } _ { c } \sinh ( \boldsymbol { \gamma } l ) \\ \\ \frac { 1 } { \boldsymbol { Z } _ { c } } \sinh ( \boldsymbol { \gamma } l ) & \cosh ( \boldsymbol { \gamma } l ) \end {matrix} \right] \left[ \begin {matrix} \boldsymbol { V _ { r } } \\ \\ \boldsymbol { I _ { r } } \end {matrix} \right] \, V s I s = cosh ( γ l ) Z c 1 sinh ( γ l ) Z c sinh ( γ l ) cosh ( γ l ) V r I r
که در آن، در ابتدای خط شرایط V s = V ( l ) \boldsymbol{V_{s}} = \boldsymbol{V}(l) \, V s = V ( l ) I s = I ( l ) \boldsymbol{I_{s}} = \boldsymbol{I}(l) \, I s = I ( l )
مدل پارامتر توزیع شده خط با چند هادی
مدل پارامتر توزیع شده را میتوان به یک خط با n n n فازورهای ولتاژ و جریان را با بردارهای n × 1 n \times 1 n × 1
V = [ V a ( x ) V b ( x ) V c ( x ) ] , I = [ I a ( x ) I b ( x ) I c ( x ) ] \large \boldsymbol { V } = \left[ \begin {matrix} \boldsymbol { V _ { a } } ( x ) \\ \boldsymbol { V _ { b } } ( x ) \\ \boldsymbol { V _ { c } } ( x ) \end {matrix} \right] \, , \boldsymbol { I } = \left[ \begin {matrix} \boldsymbol { I _ { a } } ( x ) \\ \boldsymbol { I _ { b } } ( x ) \\ \boldsymbol { I _ { c } } ( x ) \end {matrix} \right] \, V = V a ( x ) V b ( x ) V c ( x ) , I = I a ( x ) I b ( x ) I c ( x )
و امپدانس و ادمیتانس با ماتریسهای مختلط n × n n \times n n × n
[ Z ] = [ Z a a Z a b Z a c Z b a Z b b Z b c Z c a Z c b Z c c ] \large [ Z ] = \left[ \begin {matrix} Z _ { a a } & Z _ { a b } & Z _ { a c } \\ Z _ { b a } & Z _ { b b } & Z _ { b c } \\ Z _ { c a } & Z _ { c b } & Z _ { c c } \end {matrix} \right] \, [ Z ] = Z aa Z ba Z c a Z ab Z bb Z c b Z a c Z b c Z cc
[ Y ] = [ Y a a Y a b Y a c Y b a Y b b Y b c Y c a Y c b Y c c ] \large [ Y ] = \left [ \begin {matrix} Y _ { a a } & Y _ { a b } & Y _ { a c } \\ Y _ { b a } & Y _ { b b } & Y _ { b c } \\ Y _ { c a } & Y _ { c b } & Y _ { c c } \end {matrix} \right] \, [ Y ] = Y aa Y ba Y c a Y ab Y bb Y c b Y a c Y b c Y cc
معادلات (۱) و (۲) در مدل تکفاز را میتوان برای چند هادی به صورت زیر بازنویسی کرد:
d V d x = [ Z ] I ( 7 ) \large \frac { d \boldsymbol { V } } { d x} = [ Z ] \boldsymbol { I } \, \; \; \; \; \; ( 7 ) d x d V = [ Z ] I ( 7 )
d I d x = [ Y ] V ( 8 ) \large \frac { d \boldsymbol { I } } { d x } = [ Y ] \boldsymbol { V } \, \; \; \; \; \; ( 8 ) d x d I = [ Y ] V ( 8 )
با مشتقگیری از این معادلات، داریم:
d 2 V d x 2 = [ Z ] d I d x ( 9 ) \large \frac { d ^ { 2 } \boldsymbol { V } } { d x ^ { 2 } } = [ Z ] \frac { d \boldsymbol { I } } { d x} \, \; \; \; \; \; (9) d x 2 d 2 V = [ Z ] d x d I ( 9 )
d 2 I d x 2 = [ Y ] d V d x ( 10 ) \large \frac { d ^ { 2 } \boldsymbol { I } } { d x ^ { 2 } } = [ Y ] \frac { d \boldsymbol { V } } { d x} \, \; \; \; \; \; (10) d x 2 d 2 I = [ Y ] d x d V ( 10 )
با جایگذاری معادله (۸) در معادله (۹) و معادله (۷) در معادله (۱۰)، مشابه معادلات (۳) و (۴)، برای چند هادی داریم:
d 2 V d x 2 = [ Z ] [ Y ] V ( 11 ) \large \frac { d ^ { 2 } \boldsymbol { V } } { d x ^ { 2 } } = [ Z ] [ Y ] \boldsymbol { V } \, \; \; \; \; \; ( 1 1 ) d x 2 d 2 V = [ Z ] [ Y ] V ( 11 )
d 2 I d x 2 = [ Y ] [ Z ] I ( 12 ) \large \frac { d ^ { 2 } \boldsymbol { I } } { d x ^ { 2 } } = [ Y ] [ Z ] \boldsymbol { I } \, \; \; \; \; \; ( 1 2 ) d x 2 d 2 I = [ Y ] [ Z ] I ( 12 )
این موضوع درباره خطهایی با چند هادی به این دلیل است که ماتریسهای [ Z ] [Z] [ Z ] [ Y ] [ Y ] [ Y ] [ Z ] [ Y ] [Z][Y] [ Z ] [ Y ] [ Y ] [ Z ] [Y][Z] [ Y ] [ Z ]
[ d 2 V a ( x ) d x 2 d 2 V b ( x ) d x 2 d 2 V c ( x ) d x 2 ] = [ Z a a Z a b Z a c Z b a Z b b Z b c Z c a Z c b Z c c ] [ Y a a Y a b Y a c Y b a Y b b Y b c Y c a Y c b Y c c ] [ V a ( x ) V b ( x ) V c ( x ) ] \large \left[ \begin {matrix} \frac { d ^ { 2 } \boldsymbol { V _ { a }} (x ) } {d x ^ { 2 }} \\ \\ \frac { d ^ { 2 } \boldsymbol { V _ { b } } (x ) }{ d x ^ {2 } } \\ \\ \frac { d ^ { 2 } \boldsymbol { V _ { c } } (x ) } {d x ^ { 2 } } \end {matrix} \right] = \left[ \begin {matrix} Z _ { a a } & Z _ { a b } & Z _ { a c } \\ Z _ { b a } & Z _ { b b } & Z _ { b c } \\ Z _ { c a } & Z _ { c b } & Z _ { c c } \end {matrix} \right] \left[ \begin{matrix} Y _ { a a } & Y _{ a b } & Y _ { a c } \\ Y _ { b a } & Y _ { b b } & Y _ { b c } \\ Y _ { c a } & Y _ { c b } & Y _ { c c } \end {matrix} \right] \left[ \begin {matrix} \boldsymbol { V _ { a } } ( x ) \\ \boldsymbol { V _ { b } } ( x ) \\ \boldsymbol { V _ { c } } ( x ) \end {matrix} \right] \, d x 2 d 2 V a ( x ) d x 2 d 2 V b ( x ) d x 2 d 2 V c ( x ) = Z aa Z ba Z c a Z ab Z bb Z c b Z a c Z b c Z cc Y aa Y ba Y c a Y ab Y bb Y c b Y a c Y b c Y cc V a ( x ) V b ( x ) V c ( x )
خط اول دستگاه معادلات بالا را میتوان به صورت زیر نوشت:
d 2 V a ( x ) d x 2 = ( Z a a Y a a + Z a b Y b a + Z a c Y c a ) V a ( x ) + ( Z a a Y a b + Z a b Y b b + Z a c Y c b ) V b ( x ) + ( Z a a Y a c + Z a b Y b c + Z a c Y c c ) V c ( x ) \large \begin {align*} \frac { d ^ { 2 } \boldsymbol { V _ { a } } ( x ) } { d x ^ { 2 } } & = \left ( Z _ { a a } Y _ { a a } + Z _ { a b } Y _ { b a } + Z _ { a c } Y _ { c a } \right ) \boldsymbol { V _ { a } } ( x ) \\ & \;\;\;\;\; + \left ( Z _ { a a } Y_ { a b } + Z _ { a b } Y _ { b b } + Z _ { a c } Y _ { c b } \right ) \boldsymbol { V _ { b } }( x ) \\ & \;\;\;\;\; + \left ( Z _ { a a } Y _ { a c } + Z _ { a b } Y _ { b c } + Z _ { a c } Y _ { c c } \right ) \boldsymbol { V _ { c } } ( x ) \, \end {align*} d x 2 d 2 V a ( x ) = ( Z aa Y aa + Z ab Y ba + Z a c Y c a ) V a ( x ) + ( Z aa Y ab + Z ab Y bb + Z a c Y c b ) V b ( x ) + ( Z aa Y a c + Z ab Y b c + Z a c Y cc ) V c ( x )
برخلاف حالت تکفاز بالا، جواب عمومی به فرم بسته برای این معادله دیفرانسیل مرتبه دوم وجود ندارد (به دلیل تقاطع تزویج بین فازها). در نتیجه، به روشی موسوم به تبدیل مُدال (Modal Transformation) برای دکوپله کردن فازها از معادلات (۱۱) و (۱۲) نیاز خواهد بود.
تبدیل مدال
تبدیل مدال روشی برای دکوپله یا جدا کردن فازها از معادلات (۱۱) و (۱۲) بر اساس تجزیه مقادیر ویژه است. در این بخش، تبدیل مدال را از قواعد و اصول اولیه به دست خواهیم آورد.
تبدیلات خطی بردارهای ولتاژ و جریان را به صورت V ′ \boldsymbol{V'} V ′ I ′ \boldsymbol{I'} I ′ a b c abc ab c 012 012 012
V ′ = [ V 0 ( x ) V 1 ( x ) V 2 ( x ) ] , I ′ = [ I 0 ( x ) I 1 ( x ) I 2 ( x ) ] \large \boldsymbol { V' } = \left [ \begin {matrix} \boldsymbol { V _ { 0 } } ( x ) \\ \boldsymbol { V _ { 1 } } ( x ) \\ \boldsymbol { V _ { 2 } } ( x ) \end {matrix} \right ] \, , \boldsymbol { I' } = \left [ \begin {matrix} \boldsymbol { I _ { 0 } } ( x ) \\ \boldsymbol { I _ { 1 } } ( x ) \\ \boldsymbol { I _ { 2 } } ( x ) \end {matrix} \right] \, V ′ = V 0 ( x ) V 1 ( x ) V 2 ( x ) , I ′ = I 0 ( x ) I 1 ( x ) I 2 ( x )
فرض کنید مقادیر اصلی به صورت زیر با مقادیر تبدیل شده مربوط میشوند:
V = [ T v ] V ′ ( 13 ) \large \boldsymbol { V } = [ T _ { v } ] \boldsymbol { V' } \; \; \; \; \; (13) V = [ T v ] V ′ ( 13 )
I = [ T i ] I ′ ( 14 ) \large \boldsymbol { I } = [ T _ { i } ] \boldsymbol { I' } \; \; \; \; \; ( 1 4 ) I = [ T i ] I ′ ( 14 )
که در آنها، [ T v ] [T_{v}] \, [ T v ] [ T i ] [T_{i}] \, [ T i ] n × n n \times n n × n [ Z ] [ Y ] [Z][Y] \, [ Z ] [ Y ] [ Y ] [ Z ] [Y][Z] \, [ Y ] [ Z ]
با جایگذاری این مقادیر تبدیل شده در معادلات (۷) و (۸) داریم:
d [ T v ] V ′ d x = [ Z ] [ T i ] I ′ \large \frac { d [ T _ { v } ] \boldsymbol { V' } } { d x } = [ Z ] [ T _ { i } ] \boldsymbol { I ' } \, d x d [ T v ] V ′ = [ Z ] [ T i ] I ′
d [ T i ] I ′ d x = [ Y ] [ T v ] V ′ \large \frac { d [ T _ { i } ] \boldsymbol { I' } } { d x } = [ Y ] [ T _ { v } ] \boldsymbol { V ' } \, d x d [ T i ] I ′ = [ Y ] [ T v ] V ′
با فرض اینکه ماتریسهای تبدیل [ T v ] [T_{v}] \, [ T v ] [ T i ] [T_{i}] \, [ T i ] x x x
d V ′ d x = [ T v ] − 1 [ Z ] [ T i ] I ′ \large \frac { d \boldsymbol { V' } } { d x } = [ T _ { v } ] ^ { - 1 } [ Z ] [ T _ { i } ] \boldsymbol { I' } \, d x d V ′ = [ T v ] − 1 [ Z ] [ T i ] I ′
d I ′ d x = [ T i ] − 1 [ Y ] [ T v ] V ′ \large \frac { d \boldsymbol { I' } } { d x } = [ T _ { i } ] ^ { - 1 } [ Y ] [ T _ { v } ] \boldsymbol { V' } \, d x d I ′ = [ T i ] − 1 [ Y ] [ T v ] V ′
با انجام فرایندی مشابه آنچه در بالا انجام دادیم، یعنی مشتقگیری از معادلات نسبت به x x x
d 2 V ′ d x 2 = [ T v ] − 1 [ Z ] [ Y ] [ T v ] V ′ ( 15 ) \large \frac { d ^ { 2 } \boldsymbol { V' } } { d x ^ { 2 } } = [ T _ { v } ] ^ { - 1 } [ Z ] [ Y ] [ T _ { v } ] \boldsymbol { V' } \, \; \; \; \; \; (15) d x 2 d 2 V ′ = [ T v ] − 1 [ Z ] [ Y ] [ T v ] V ′ ( 15 )
d 2 I ′ d x 2 = [ T i ] − 1 [ Y ] [ Z ] [ T i ] I ′ ( 16 ) \large \frac { d ^ { 2 } \boldsymbol { I' } } { d x ^ { 2 } } = [ T _ { i } ] ^ { - 1 } [ Y ] [ Z ] [ T _ { i } ] \boldsymbol { I' } \, \; \; \; \; \; ( 1 6 ) d x 2 d 2 I ′ = [ T i ] − 1 [ Y ] [ Z ] [ T i ] I ′ ( 16 )
برای دکوپلهسازی فازها در معادلات (۱۵) و (۱۶)، باید [ T v ] − 1 [ Z ] [ Y ] [ T v ] [T_{v}]^{-1} [Z] [Y] [T_{v}] \, [ T v ] − 1 [ Z ] [ Y ] [ T v ] [ T i ] − 1 [ Y ] [ Z ] [ T i ] [T_{i}]^{-1} [Y] [Z] [T_{i}] \, [ T i ] − 1 [ Y ] [ Z ] [ T i ] قطری باشند؛ یعنی:
diag ( λ v ) = [ T v ] − 1 [ Z ] [ Y ] [ T v ] \large \text {diag} ( \boldsymbol { \lambda _ { v } }) = [ T _ { v } ] ^ { - 1 } [ Z ] [ Y ] [ T _ { v } ] \, diag ( λ v ) = [ T v ] − 1 [ Z ] [ Y ] [ T v ]
diag ( λ i ) = [ T i ] − 1 [ Y ] [ Z ] [ T i ] \large \text {diag} ( \boldsymbol { \lambda _ { i } } ) = [ T _ { i } ] ^ { - 1 } [ Y ] [ Z ] [ T _ { i } ] \, diag ( λ i ) = [ T i ] − 1 [ Y ] [ Z ] [ T i ]
واضح است که ماتریس تبدیل [ T v ] [T_{v}] \, [ T v ] diag ( λ v ) \text{diag}(\boldsymbol{\lambda_{v}}) diag ( λ v ) [ Z ] [ Y ] [Z][Y] \, [ Z ] [ Y ]
علاوه بر این، از آنجایی که ماتریسهای [ Z ] [Z] \, [ Z ] [ Y ] [Y] \, [ Y ] [ Z ] [ Y ] = ( [ Y ] [ Z ] ) T [Z][Y] = \left( [Y][Z] \right)^{T} \, [ Z ] [ Y ] = ( [ Y ] [ Z ] ) T ترانهاده آن مشابه هستند، بنابراین، [ Z ] [ Y ] [Z][Y] \, [ Z ] [ Y ] [ Y ] [ Z ] [Y][Z] \, [ Y ] [ Z ]
diag ( λ v ) = diag ( λ i ) = diag ( λ ) \large \text {diag} ( \boldsymbol { \lambda _ { v } } ) = \text{diag} ( \boldsymbol { \lambda _ { i } } ) = \text{diag} ( \boldsymbol { \lambda } ) \, diag ( λ v ) = diag ( λ i ) = diag ( λ )
اکنون میتوانیم معادلات (۱۵) و (۱۶) را به صورت زیر بازنویسی کنیم:
[ d 2 V 0 ( x ) d x 2 d 2 V 1 ( x ) d x 2 d 2 V 2 ( x ) d x 2 ] = [ λ 0 λ 1 λ 2 ] [ V 0 ( x ) V 1 ( x ) V 2 ( x ) ] ( 17 ) \large \left[ \begin {matrix} \frac { d ^ { 2 } \boldsymbol { V _ { 0 } } ( x ) } { d x ^ { 2 } } \\ \\ \frac { d ^ { 2 } \boldsymbol { V _ { 1 } } ( x ) } { d x ^ { 2 } } \\ \\ \frac { d ^ { 2 } \boldsymbol { V _ { 2 } } ( x ) } { d x ^ { 2 } } \end {matrix} \right] = \left[ \begin {matrix} \lambda _ { 0 } & & \\ & \lambda _ { 1 } & \\ & & \lambda _ { 2 } \end {matrix} \right ] \left [ \begin {matrix} \boldsymbol { V _ { 0 } } ( x ) \\ \boldsymbol { V _ { 1 } } ( x ) \\ \boldsymbol { V _ { 2 } } ( x ) \end {matrix} \right] \, \; \; \; \; \; ( 1 7 ) d x 2 d 2 V 0 ( x ) d x 2 d 2 V 1 ( x ) d x 2 d 2 V 2 ( x ) = λ 0 λ 1 λ 2 V 0 ( x ) V 1 ( x ) V 2 ( x ) ( 17 )
[ d 2 I 0 ( x ) d x 2 d 2 I 1 ( x ) d x 2 d 2 I 2 ( x ) d x 2 ] = [ λ 0 λ 1 λ 2 ] [ I 0 ( x ) I 1 ( x ) I 2 ( x ) ] ( 18 ) \large \left[ \begin {matrix} \frac { d ^ { 2 } \boldsymbol { I _ { 0 } } ( x ) } { d x ^ { 2 } } \\ \\ \frac { d ^ { 2 } \boldsymbol { I _ { 1 } } ( x ) } { d x ^ { 2 } } \\ \\ \frac { d ^ { 2 } \boldsymbol { I _ { 2 } } ( x ) } { d x ^ { 2 } } \end {matrix} \right ] = \left [ \begin {matrix} \lambda _ { 0 } & & \\ & \lambda _ { 1 } & \\ & & \lambda _ { 2 } \end {matrix} \right] \left[ \begin {matrix} \boldsymbol { I _ { 0 } } ( x ) \\ \boldsymbol { I _ { 1 } } ( x ) \\ \boldsymbol { I _ { 2 } } ( x ) \end {matrix} \right ] \, \; \; \; \; \; ( 1 8 ) d x 2 d 2 I 0 ( x ) d x 2 d 2 I 1 ( x ) d x 2 d 2 I 2 ( x ) = λ 0 λ 1 λ 2 I 0 ( x ) I 1 ( x ) I 2 ( x ) ( 18 )
با یادآوری حالت تکفاز که ثابت انتشار آن به صورت γ = z y \boldsymbol{\gamma} = \sqrt{\boldsymbol{zy}} γ = zy [ Γ ] [\Gamma] \, [ Γ ]
[ Γ ] = ( [ Z ] [ Y ] ) 1 2 \large [ \Gamma ] = ( [ Z ] [ Y ] ) ^ { \frac { 1 } { 2 } } \, [ Γ ] = ([ Z ] [ Y ] ) 2 1
فرض میکنیم γ 0 \gamma_0 γ 0 γ 1 \gamma_1 γ 1 γ 2 \gamma_2 γ 2 [ Γ ] [\Gamma] \, [ Γ ]
یکی از ویژگیهای مقدار ویژه این است که اگر ماتریس A A A λ 1 \lambda _ 1 λ 1 λ 2 \lambda _ 2 λ 2 ⋯ \cdots ⋯ λ n \lambda _ n λ n A k A^{k} \, A k λ 1 k \lambda_1^{k} λ 1 k λ 2 k \lambda_2^{k} λ 2 k ⋯ \cdots ⋯ λ n k \lambda_n^{k} λ n k
بنابراین، از آنجایی که λ 0 \lambda _ 0 λ 0 λ 1 \lambda _ 1 λ 1 λ 2 \lambda _ 2 λ 2 [ Z ] [ Y ] [Z][Y] \, [ Z ] [ Y ] γ 0 \gamma_0 γ 0 γ 1 \gamma_1 γ 1 γ 2 \gamma_2 γ 2 ( [ Z ] [ Y ] ) 1 2 ([Z][Y])^{\frac{1}{2}} \, ([ Z ] [ Y ] ) 2 1
[ λ 0 λ 1 λ 2 ] = [ γ 0 2 γ 1 2 γ 2 2 ] \large \left[ \begin {matrix} \lambda _ { 0 } & & \\ & \lambda _ { 1 } & \\ & & \lambda _ { 2 } \end {matrix} \right] = \left[ \begin {matrix} \gamma _ { 0 } ^ { 2 } & & \\ & \gamma _ { 1 } ^ { 2 } & \\ & & \gamma _ { 2 } ^ { 2 } \end {matrix} \right] \, λ 0 λ 1 λ 2 = γ 0 2 γ 1 2 γ 2 2
میتوانیم معادلات (۱۷) و (۱۸) را به صورت زیر بنویسیم:
[ d 2 V 0 ( x ) d x 2 d 2 V 1 ( x ) d x 2 d 2 V 2 ( x ) d x 2 ] = [ γ 0 2 γ 1 2 γ 2 2 ] [ V 0 ( x ) V 1 ( x ) V 2 ( x ) ] ( 19 ) \large \left[ \begin {matrix} \frac { d ^ { 2 } \boldsymbol { V _ { 0 } } ( x ) } { d x ^ { 2 } } \\ \\ \frac { d ^ { 2 } \boldsymbol { V _ { 1 } } ( x ) } { dx ^ { 2} } \\ \\ \frac { d ^ { 2 } \boldsymbol { V _ { 2 } } ( x ) } { d x ^ { 2} } \end {matrix} \right ] = \left [ \begin {matrix} \gamma _ { 0 } ^ { 2 } & & \\ & \gamma _ { 1 } ^ { 2 } & \\ & & \gamma _ { 2 } ^ { 2 } \end {matrix} \right] \left[ \begin {matrix} \boldsymbol { V _ { 0 } } ( x ) \\ \boldsymbol { V _ { 1 } } ( x ) \\ \boldsymbol { V _ { 2 } } ( x ) \end {matrix} \right] \, \; \; \; \; \; ( 1 9 ) d x 2 d 2 V 0 ( x ) d x 2 d 2 V 1 ( x ) d x 2 d 2 V 2 ( x ) = γ 0 2 γ 1 2 γ 2 2 V 0 ( x ) V 1 ( x ) V 2 ( x ) ( 19 )
[ d 2 I 0 ( x ) d x 2 d 2 I 1 ( x ) d x 2 d 2 I 2 ( x ) d x 2 ] = [ γ 0 2 γ 1 2 γ 2 2 ] [ I 0 ( x ) I 1 ( x ) I 2 ( x ) ] ( 20 ) \large \left [ \begin {matrix} \frac { d ^ { 2 } \boldsymbol { I _ { 0 } } ( x ) } { d x ^ { 2 } } \\ \\ \frac { d ^ { 2 } \boldsymbol { I _ { 1 } } ( x ) } { d x ^ { 2 } } \\ \\ \frac { d ^ { 2 } \boldsymbol { I _ { 2 } } ( x ) } { d x ^ { 2 } } \end {matrix} \right ] = \left [ \begin {matrix} \gamma _ { 0 } ^ { 2 } & & \\ & \gamma _ { 1 } ^ { 2 } & \\ & & \gamma _ { 2 } ^ { 2 } \end {matrix} \right] \left [ \begin {matrix} \boldsymbol { I _ { 0 } } ( x ) \\ \boldsymbol { I _ { 1 } } ( x ) \\ \boldsymbol { I _ { 2 } } ( x ) \end {matrix} \right ] \, \; \; \; \; \; ( 2 0 ) d x 2 d 2 I 0 ( x ) d x 2 d 2 I 1 ( x ) d x 2 d 2 I 2 ( x ) = γ 0 2 γ 1 2 γ 2 2 I 0 ( x ) I 1 ( x ) I 2 ( x ) ( 20 )
اکنون هر کدام از این معادلات دیفرانسیل دکوپله مدال بالا را میتوان با استفاده از جواب عمومی زیر حل کرد:
V 0 ( x ) = A 0 e γ 0 x + B 0 e − γ 0 x V 1 ( x ) = A 1 e γ 1 x + B 1 e − γ 1 x V 2 ( x ) = A 2 e γ 2 x + B 2 e − γ 2 x \large \begin {align*} \boldsymbol { V _ { 0 } } ( x ) & = A _ { 0 } e ^ { \gamma _ 0 x } + B _ { 0 } e ^ { - \gamma _ 0 x } \, \\ \boldsymbol { V _ { 1 } } ( x ) & = A _ { 1 } e ^ { \gamma _ 1 x } + B _ { 1 } e ^ { - \gamma _ 1 x } \, \\ \boldsymbol { V _ { 2 } } ( x ) & = A _ { 2 } e ^ { \gamma _ 2 x } + B _ { 2 } e ^ { - \gamma _ 2 x } \, \end {align*} V 0 ( x ) V 1 ( x ) V 2 ( x ) = A 0 e γ 0 x + B 0 e − γ 0 x = A 1 e γ 1 x + B 1 e − γ 1 x = A 2 e γ 2 x + B 2 e − γ 2 x
با مشتقگیری از معادلات بالا نسبت به x x x
[ d V 0 ( x ) d x d V 1 ( x ) d x d V 2 ( x ) d x ] = [ γ 0 γ 1 γ 2 ] [ A 0 e γ 0 x − B 0 e − γ 0 x A 1 e γ 1 x − B 1 e − γ 1 x A 2 e γ 2 x − B 2 e − γ 2 x ] ( 21 ) \large \left[ \begin {matrix} \frac { d \boldsymbol { V _ { 0 } } ( x ) } { d x } \\ \\ \frac { d \boldsymbol { V _ { 1 } } ( x ) }{ d x } \\ \\ \frac { d \boldsymbol { V _ { 2 } } ( x ) } { d x } \end {matrix} \right] = \left[ \begin {matrix} \gamma _ { 0 } & & \\ & \gamma _ { 1 } & \\ & & \gamma _ { 2 } \end {matrix} \right ] \left[ \begin {matrix} A _ { 0 } e ^ { \gamma _ 0 x } - B _ { 0 } e ^ { - \gamma _ 0 x } \\ A _ { 1 } e ^ { \gamma _ 1 x } - B _ { 1 } e ^ { - \gamma _ 1 x } \\ A _ { 2 } e ^ { \gamma _ 2 x } - B _ { 2 } e ^ { - \gamma _ 2 x } \end {matrix} \right] \, \; \; \; \; \; ( 2 1 ) d x d V 0 ( x ) d x d V 1 ( x ) d x d V 2 ( x ) = γ 0 γ 1 γ 2 A 0 e γ 0 x − B 0 e − γ 0 x A 1 e γ 1 x − B 1 e − γ 1 x A 2 e γ 2 x − B 2 e − γ 2 x ( 21 )
معادله (۲۱) بالا را به فرم استاندارد زیر مینویسیم:
d V ′ d x = [ γ ] V x ( 22 ) \large \frac { d \boldsymbol { V' } } { d x } = [\gamma] \boldsymbol { V _ x } \, \; \; \; \; \; ( 2 2 ) d x d V ′ = [ γ ] V x ( 22 )
بنابراین، میتوان نوشت:
d V ′ d x = [ T v ] − 1 [ Z ] [ T i ] I ′ \large \frac { d \boldsymbol { V' } } { d x } = [ T _ { v } ] ^ { - 1 } [ Z ] [ T _ { i } ] \boldsymbol { I' } \, d x d V ′ = [ T v ] − 1 [ Z ] [ T i ] I ′
با برابر قرار دادن معادله اخیر و معادله (۲۲) و حل آن برای V x \boldsymbol{V_x} V x
V x = [ γ ] − 1 [ T v ] − 1 [ Z ] [ T i ] I ′ \large \boldsymbol { V _ x } = [\gamma] ^ { - 1 } [ T _ { v } ] ^ { - 1 } [ Z ] [ T _ { i } ] \boldsymbol { I' } \, V x = [ γ ] − 1 [ T v ] − 1 [ Z ] [ T i ] I ′
ماتریس امپدانس مشخصه مدال (یا ماتریس امپدانس موج مدال) را به صورت زیر تعریف میکنیم:
[ Z c ] = [ γ ] − 1 [ T v ] − 1 [ Z ] [ T i ] ( 23 ) \large [ Z _ c ] = [ \gamma ] ^ { - 1 } [ T _ { v } ] ^ { - 1 } [ Z ] [ T _ { i } ] \, \; \; \; \; \; ( 2 3 ) [ Z c ] = [ γ ] − 1 [ T v ] − 1 [ Z ] [ T i ] ( 23 )
با استفاده از این تعریف، بردار جریان مدال را میتوانیم به صورت زیر بنویسیم:
I ′ = [ Z c ] − 1 V x ( 24 ) \large \boldsymbol { I' } = [ Z _ c ] ^ { - 1 } \boldsymbol { V _ x } \, \; \; \; \; \; (24) I ′ = [ Z c ] − 1 V x ( 24 )
میتوان نشان داد که اگر [ γ ] [\gamma] [ γ ] [ Z c ] [Z_c] [ Z c ]
[ I 0 ( x ) I 1 ( x ) I 2 ( x ) ] = [ 1 Z 0 1 Z 1 1 Z 2 ] [ A 0 e γ 0 x − B 0 e − γ 0 x A 1 e γ 1 x − B 1 e − γ 1 x A 2 e γ 2 x − B 2 e − γ 2 x ] ( 25 ) \large \left[ \begin {matrix} \boldsymbol { I _ { 0 } } ( x ) \\ \boldsymbol { I _ { 1 } } ( x ) \\ \boldsymbol { I _ { 2} } (x ) \end {matrix} \right] = \left[ \begin {matrix} \frac { 1 } { \boldsymbol { Z _ 0 } } & & \\ & \frac { 1 } { \boldsymbol { Z _ 1 } } & \\ & & \frac { 1 } { \boldsymbol { Z _ 2 } } \end{matrix} \right] \left[ \begin{matrix} A_{0} e^{\gamma_0 x} - B_{0} e^{-\gamma _ 0 x } \\ A _ { 1 } e ^ { \gamma _ 1 x } - B _ { 1 } e ^ { - \gamma _ 1 x } \\ A _ { 2 } e ^ { \gamma _ 2 x } - B _ { 2 } e ^ { - \gamma _ 2 x } \end {matrix} \right] \, \; \; \; \; \; ( 2 5 ) I 0 ( x ) I 1 ( x ) I 2 ( x ) = Z 0 1 Z 1 1 Z 2 1 A 0 e γ 0 x − B 0 e − γ 0 x A 1 e γ 1 x − B 1 e − γ 1 x A 2 e γ 2 x − B 2 e − γ 2 x ( 25 )
شرایط مرزی
اکنون شش معادله مدال داریم که میتوانیم آنها را با استفاده از شرایط اولیه زیر حل کنیم:
[ V 0 ( x ) V 1 ( x ) V 2 ( x ) ] = [ A 0 e γ 0 x + B 0 e − γ 0 x A 1 e γ 1 x + B 1 e − γ 1 x A 2 e γ 2 x + B 2 e − γ 2 x ] \large \left[ \begin {matrix} \boldsymbol { V _ { 0 } } ( x ) \\ \boldsymbol { V _ { 1 } } ( x ) \\ \boldsymbol { V _ { 2 } } ( x ) \end{matrix} \right] = \left[ \begin {matrix} A _ { 0 } e ^ { \gamma _ 0 x } + B _ { 0 } e ^ { - \gamma _ 0 x } \\ A _ { 1 } e ^ { \gamma _ 1 x } + B _ { 1 } e ^ { - \gamma _ 1 x } \\ A _ { 2 } e ^ { \gamma _ 2 x } + B _ { 2 } e ^ { - \gamma _ 2 x } \end {matrix} \right] \, V 0 ( x ) V 1 ( x ) V 2 ( x ) = A 0 e γ 0 x + B 0 e − γ 0 x A 1 e γ 1 x + B 1 e − γ 1 x A 2 e γ 2 x + B 2 e − γ 2 x
[ I 0 ( x ) I 1 ( x ) I 2 ( x ) ] = [ 1 Z 0 1 Z 1 1 Z 2 ] [ A 0 e γ 0 x − B 0 e − γ 0 x A 1 e γ 1 x − B 1 e − γ 1 x A 2 e γ 2 x − B 2 e − γ 2 x ] \large \left[ \begin {matrix} \boldsymbol { I _ { 0 }} ( x ) \\ \boldsymbol { I _ { 1 } } ( x ) \\ \boldsymbol { I _ { 2 } } ( x ) \end {matrix} \right] = \left[ \begin {matrix} \frac { 1 } { \boldsymbol { Z _ 0 } } & & \\ & \frac { 1 } { \boldsymbol { Z _ 1 } } & \\ & & \frac { 1 } { \boldsymbol { Z _ 2 } } \end {matrix} \right] \left[ \begin {matrix} A _ { 0 } e ^ { \gamma _ 0 x } - B _ { 0 } e ^ { - \gamma _ 0 x } \\ A _ { 1 } e ^ { \gamma _ 1 x } - B _ { 1 } e ^ { - \gamma _ 1 x } \\ A _ { 2 } e ^ { \gamma _ 2 x } - B _ { 2 } e ^ { - \gamma _ 2 x } \end {matrix} \right] \, I 0 ( x ) I 1 ( x ) I 2 ( x ) = Z 0 1 Z 1 1 Z 2 1 A 0 e γ 0 x − B 0 e − γ 0 x A 1 e γ 1 x − B 1 e − γ 1 x A 2 e γ 2 x − B 2 e − γ 2 x
شرایط مرزی V r \boldsymbol{V_r} V r I r \boldsymbol{I_r} I r
V r ′ = [ T v ] − 1 V r \large \boldsymbol { V _ r }' = [ T _ v ] ^ { - 1 } \boldsymbol { V _ r } V r ′ = [ T v ] − 1 V r
I r ′ = [ T i ] − 1 I r \large \boldsymbol { I _ r }' = [ T _ i ] ^ { - 1 } \boldsymbol { I _ r } I r ′ = [ T i ] − 1 I r
در نقطه دریافت (یعنی x = 0 x = 0 x = 0
[ V 0 r V 1 r V 2 r ] = [ A 0 + B 0 A 1 + B 1 A 2 + B 2 ] \large \left[ \begin {matrix} \boldsymbol { V _ { 0 r } } \\ \boldsymbol { V _ { 1 r } } \\ \boldsymbol { V _ { 2 r } } \end {matrix} \right] = \left[ \begin {matrix} A _ { 0 } + B _ { 0 } \\ A _ { 1 } + B _ { 1 } \\ A _ { 2 } + B _ { 2 } \end {matrix} \right] \, V 0 r V 1 r V 2 r = A 0 + B 0 A 1 + B 1 A 2 + B 2
[ Z 0 I 0 r Z 1 I 1 r Z 2 I 2 r ] = [ A 0 − B 0 A 1 − B 1 A 2 − B 2 ] \large \left[ \begin {matrix} \boldsymbol { Z _ 0 } \boldsymbol { I _ { 0 r } } \\ \boldsymbol { Z _ 1 } \boldsymbol { I _ { 1 r } } \\ \boldsymbol { Z _ 2 } \boldsymbol { I _ { 2 r } } \end {matrix} \right] = \left[ \begin {matrix} A _ { 0 } - B _ { 0 } \\ A _ { 1 } - B _ { 1 } \\ A _ { 2 } - B _ { 2 } \end {matrix} \right] \, Z 0 I 0 r Z 1 I 1 r Z 2 I 2 r = A 0 − B 0 A 1 − B 1 A 2 − B 2
جواب ثابتهای [ A ] [A] [ A ] [ B ] [B] [ B ]
[ A 0 A 1 A 2 ] = 1 2 [ V 0 r − Z 0 I 0 r V 1 r − Z 1 I 1 r V 2 r − Z 2 I 2 r ] ( 26 ) \large \left[ \begin {matrix} A _ { 0 } \\ A _ { 1 } \\ A _ { 2 } \end {matrix} \right] = \frac { 1 } { 2 } \left[ \begin {matrix} \boldsymbol { V _ { 0 r } } - \boldsymbol { Z _ 0 } \boldsymbol { I _ { 0 r } } \\ \boldsymbol { V _ { 1 r } } - \boldsymbol { Z _ 1 } \boldsymbol { I _ { 1 r } } \\ \boldsymbol { V _ { 2 r } } - \boldsymbol { Z _ 2 } \boldsymbol { I _ { 2 r } } \end {matrix} \right] \, \; \; \; \; \; ( 2 6 ) A 0 A 1 A 2 = 2 1 V 0 r − Z 0 I 0 r V 1 r − Z 1 I 1 r V 2 r − Z 2 I 2 r ( 26 )
[ B 0 B 1 B 2 ] = 1 2 [ V 0 r + Z 0 I 0 r V 1 r + Z 1 I 1 r V 2 r + Z 2 I 2 r ] ( 27 ) \large \left[ \begin {matrix} B _ { 0 } \\ B _ { 1 } \\ B _ { 2 } \end {matrix} \right] = \frac { 1 } { 2 } \left[ \begin {matrix} \boldsymbol { V _ { 0 r } } + \boldsymbol { Z _ 0 } \boldsymbol { I _ { 0 r } } \\ \boldsymbol { V _ { 1 r } } + \boldsymbol { Z _ 1 } \boldsymbol { I _ { 1 r } } \\ \boldsymbol { V _ { 2 r } } + \boldsymbol { Z _ 2 } \boldsymbol { I _ { 2 r } } \end {matrix} \right] \, \;\;\; \; \; ( 2 7 ) B 0 B 1 B 2 = 2 1 V 0 r + Z 0 I 0 r V 1 r + Z 1 I 1 r V 2 r + Z 2 I 2 r ( 27 )
این ثابتها را میتوان در معادلات ولتاژ و جریان مدال قرار داد و عبارات نهایی را محاسبه کرد:
[ V 0 ( x ) V 1 ( x ) V 2 ( x ) ] = 1 2 [ ( V 0 r − Z 0 I 0 r ) e γ 0 x + ( V 0 r + Z 0 I 0 r ) e − γ 0 x ( V 1 r − Z 1 I 1 r ) e γ 1 x + ( V 1 r + Z 1 I 1 r ) e − γ 1 x ( V 2 r − Z 2 I 2 r ) e γ 2 x + ( V 2 r + Z 2 I 2 r ) e − γ 2 x ] ( 28 ) \large \left[ \begin {matrix} \boldsymbol { V _ { 0 } } ( x ) \\ \boldsymbol { V _ { 1 } } ( x ) \\ \boldsymbol { V _ { 2 } } ( x ) \end{matrix} \right] = \frac { 1 } { 2 } \left[ \begin {matrix} ( \boldsymbol { V _ { 0 r } } - \boldsymbol { Z _ 0 } \boldsymbol { I _ { 0 r } } ) e ^ { \gamma _ 0 x } + ( \boldsymbol { V _ { 0 r } } + \boldsymbol { Z _ 0 } \boldsymbol { I _ { 0 r } } ) e ^ { -\gamma _ 0 x } \\ ( \boldsymbol { V _ { 1 r } } - \boldsymbol { Z _ 1 } \boldsymbol { I _ { 1 r } } ) e ^ { \gamma _ 1 x } + ( \boldsymbol { V _ { 1 r } } + \boldsymbol { Z _ 1 } \boldsymbol { I _ { 1 r } } ) e ^ { - \gamma _ 1 x } \\ ( \boldsymbol { V _ { 2 r } } - \boldsymbol { Z _ 2 } \boldsymbol { I _ { 2 r } } ) e ^ { \gamma _ 2 x } + ( \boldsymbol { V _ { 2 r } } + \boldsymbol { Z _ 2 } \boldsymbol { I _ { 2 r } } ) e ^ { - \gamma _ 2 x } \end {matrix} \right] \, \; \; \; \; \; ( 2 8 ) V 0 ( x ) V 1 ( x ) V 2 ( x ) = 2 1 ( V 0 r − Z 0 I 0 r ) e γ 0 x + ( V 0 r + Z 0 I 0 r ) e − γ 0 x ( V 1 r − Z 1 I 1 r ) e γ 1 x + ( V 1 r + Z 1 I 1 r ) e − γ 1 x ( V 2 r − Z 2 I 2 r ) e γ 2 x + ( V 2 r + Z 2 I 2 r ) e − γ 2 x ( 28 )
[ I 0 ( x ) I 1 ( x ) I 2 ( x ) ] = [ 1 2 Z 0 1 2 Z 1 1 2 Z 2 ] [ ( V 0 r − Z 0 I 0 r ) e γ 0 x − ( V 0 r + Z 0 I 0 r ) e − γ 0 x ( V 1 r − Z 1 I 1 r ) e γ 1 x − ( V 1 r + Z 1 I 1 r ) e − γ 1 x ( V 2 r − Z 2 I 2 r ) e γ 2 x − ( V 2 r + Z 2 I 2 r ) e − γ 2 x ] ( 29 ) \large \left[ \begin {matrix} \boldsymbol { I _ { 0 } } ( x ) \\ \boldsymbol { I _ { 1 } } ( x ) \\ \boldsymbol { I _ { 2 } } ( x ) \end {matrix} \right] = \left[ \begin {matrix} \frac { 1 } { 2 \boldsymbol { Z _ 0 } } & & \\ & \frac { 1 } { 2 \boldsymbol { Z _ 1 } } & \\ & & \frac { 1 } { 2 \boldsymbol { Z _ 2 } } \end {matrix} \right] \left[ \begin {matrix} ( \boldsymbol { V _ { 0 r } } - \boldsymbol { Z _ 0 } \boldsymbol { I _ { 0 r } } ) e ^ { \gamma _ 0 x } - ( \boldsymbol { V _ { 0 r } } + \boldsymbol { Z _ 0 } \boldsymbol { I _ { 0 r } } ) e ^ { - \gamma _ 0 x } \\ ( \boldsymbol { V _ { 1 r } } - \boldsymbol { Z _ 1 } \boldsymbol { I _ { 1 r } } ) e ^ { \gamma _ 1 x } - ( \boldsymbol { V _ { 1 r } } + \boldsymbol { Z _ 1 } \boldsymbol { I _ { 1 r} } ) e ^ { - \gamma _ 1 x } \\ ( \boldsymbol { V _ { 2 r } } - \boldsymbol { Z _ 2 } \boldsymbol { I _ { 2 r } } ) e ^ { \gamma _ 2 x } - ( \boldsymbol { V _ { 2 r } } + \boldsymbol { Z _ 2 } \boldsymbol { I _ { 2 r } } ) e ^ { - \gamma _ 2 x } \end {matrix} \right] \, \; \; \; \; \; ( 2 9 ) I 0 ( x ) I 1 ( x ) I 2 ( x ) = 2 Z 0 1 2 Z 1 1 2 Z 2 1 ( V 0 r − Z 0 I 0 r ) e γ 0 x − ( V 0 r + Z 0 I 0 r ) e − γ 0 x ( V 1 r − Z 1 I 1 r ) e γ 1 x − ( V 1 r + Z 1 I 1 r ) e − γ 1 x ( V 2 r − Z 2 I 2 r ) e γ 2 x − ( V 2 r + Z 2 I 2 r ) e − γ 2 x ( 29 )
فرم هیپربولیک معادلات خط با چند هادی
مشابه مدل با پارامتر توزیع شده تکفاز، ولتاژها و جریانها نهایی نشان داده شده در معادلات (۲۸) و (۲۹) را میتوان به فرم هیپربولیک تبدیل کرد:
[ V 0 ( x ) V 1 ( x ) V 2 ( x ) ] = [ cosh ( γ 0 x ) cosh ( γ 1 x ) cosh ( γ 2 x ) ] [ V 0 r V 1 r V 2 r ] + [ Z 0 sinh ( γ 0 x ) Z 1 sinh ( γ 1 x ) Z 2 sinh ( γ 2 x ) ] [ I 0 r I 1 r I 2 r ] ( 30 ) \large \begin {align*} \left[ \begin {matrix} \boldsymbol { V _ { 0 } } ( x ) \\ \boldsymbol { V _ { 1 } } ( x ) \\ \boldsymbol { V _ { 2 } } ( x ) \end {matrix} \right] & = \left[ \begin {matrix} \cosh { ( \gamma _ 0 x ) } & & \\ & \cosh { ( \gamma _ 1 x ) } & \\ & & \cosh { ( \gamma _ 2 x ) } \end {matrix} \right] \left[ \begin {matrix} \boldsymbol { V _ { 0 r } } \\ \boldsymbol { V _ { 1 r } } \\ \boldsymbol { V _ { 2 r } } \end {matrix} \right] \\ & \;\;\; \;+ \left[ \begin {matrix} \boldsymbol { Z _ 0 } \sinh { ( \gamma _ 0 x ) } & & \\ & \boldsymbol { Z _ 1 } \sinh { ( \gamma _ 1 x ) } & \\ & & \boldsymbol { Z _ 2 } \sinh { ( \gamma _ 2 x ) } \end {matrix} \right] \left[ \begin {matrix} \boldsymbol { I _ { 0 r } } \\ \boldsymbol { I _ { 1 r } } \\ \boldsymbol { I _ { 2 r } } \end {matrix} \right] \, \; \; \; \; \; ( 3 0 ) \end {align*} V 0 ( x ) V 1 ( x ) V 2 ( x ) = cosh ( γ 0 x ) cosh ( γ 1 x ) cosh ( γ 2 x ) V 0 r V 1 r V 2 r + Z 0 sinh ( γ 0 x ) Z 1 sinh ( γ 1 x ) Z 2 sinh ( γ 2 x ) I 0 r I 1 r I 2 r ( 30 )
[ I 0 ( x ) I 1 ( x ) I 2 ( x ) ] = [ 1 Z 0 sinh ( γ 0 x ) 1 Z 1 sinh ( γ 1 x ) 1 Z 2 sinh ( γ 2 x ) ] [ V 0 r V 1 r V 2 r ] + [ cosh ( γ 0 x ) cosh ( γ 1 x ) cosh ( γ 2 x ) ] [ I 0 r I 1 r I 2 r ] ( 31 ) \large \begin {align*} \left[ \begin {matrix} \boldsymbol { I _ { 0 } } ( x ) \\ \boldsymbol { I _ { 1 } } ( x ) \\ \boldsymbol { I _ { 2} } ( x ) \end {matrix} \right] & = \left[ \begin {matrix} \frac { 1 } { \boldsymbol { Z _ 0 } } \sinh { ( \gamma _ 0 x ) } & & \\ & \frac { 1 } { \boldsymbol { Z _ 1 } } \sinh { ( \gamma _ 1 x ) } & \\ & & \frac { 1 } { \boldsymbol {Z _ 2 } } \sinh { ( \gamma _ 2 x ) } \end {matrix} \right] \left[ \begin{matrix} \boldsymbol { V _ { 0 r } } \\ \boldsymbol { V _ { 1 r } } \\ \boldsymbol { V _ { 2 r } } \end {matrix} \right] \\ & \;\;\;\;+ \left[ \begin {matrix} \cosh { ( \gamma _ 0 x ) } & & \\ & \cosh { ( \gamma _ 1 x ) } & \\ & & \cosh { ( \gamma _ 2 x ) } \end {matrix} \right] \left[ \begin {matrix} \boldsymbol { I _ { 0 r } } \\ \boldsymbol { I _ { 1 r } } \\ \boldsymbol { I _ { 2 r } } \end {matrix} \right] \, \; \; \; \; \; ( 3 1 ) \end {align*} I 0 ( x ) I 1 ( x ) I 2 ( x ) = Z 0 1 sinh ( γ 0 x ) Z 1 1 sinh ( γ 1 x ) Z 2 1 sinh ( γ 2 x ) V 0 r V 1 r V 2 r + cosh ( γ 0 x ) cosh ( γ 1 x ) cosh ( γ 2 x ) I 0 r I 1 r I 2 r ( 31 )
اگر این مطلب برای شما مفید بوده است، آموزشهای زیر نیز به شما پیشنهاد میشوند:
^^