



مدولاسیون کلیدزنی شیفت فاز یا PSK چیست؟ – از صفر تا صد
مدولاسیون «کلیدزنی شیفت فاز» (Phase Shift Keying) یا مدولاسیون PSK یک تکنیک مدولاسیون دیجیتال است که دادهها را از طریق تغییر فاز سیگنال حامل به صورت متناسب با سیگنال پیام دیجیتال ارسال میکند. مدولاسیون کلیدزنی شیفت فاز یا مدولاسیون psk دارای انواع مختلفی است که یکی از سادهترین انواع آن کلیدزنی شیفت فاز باینری یا BPSK است. از سایر انواع آن میتوان به مدولاسیون شیفت فاز «تربیعی» (Quadrature) یا QPSK، مدولاسیون کلیدزنی شیفت فاز ۸ نقطهای یا و مدولاسیون کلیدزنی شیفت فاز ۱۶ نقطهای اشاره کرد. تعیین نوع مدولاسیون کاملا بستگی به نیاز سیستم دارد. در این مطلب قصد داریم به بررسی اصول کار مدولاسیون کلیدزنی شیفت فاز یا psk بپردازیم و به صورت عمده توجه خود را روی مدولاسیون کلیدزنی شیفت فاز باینری یا BPSK متمرکز کنیم.


اصول کار مدولاسیون کلیدزنی شیفت فاز یا PSK
امروزه از مدولاسیون کلیدزنی شیفت فاز یا PSK به صورت گسترده در کاربردهایی مانند سیستمهای مخابرات رادیویی استفاده میشود. این تکنیک به صورت خاص با حوزه وسیع مخابرات داده بسیار سازگار است. استفاده از تکنیک مدولاسیون کلیدزنی شیفت فاز یا PSK توانایی انتقال دادهها روی یک سیگنال مخابراتی رادیویی را به صورت موثرتری نسبت به «مدولاسیون کلیدزنی شیفت فرکانس» (Frequency Shift Keying) یا FSK و سایر انواع روشهای مدولاسیون دیجیتال فراهم میکند.
به دلیل اینکه امروزه اکثرا مخابرات از نوع آنالوگ به دیجیتال تبدیل شده است و نیز شاهد رشد روز افزون در حوزه مخابرات داده هستیم، روشهای مدولاسیون مختلفی نیز برای انتقال داده به صورت همگام مورد استفاده قرار میگیرند. یکی از این روشها، مدولاسیون کلیدزنی شیفت فاز است. شاخههای مختلفی برای مدولاسیون کلیدزنی شیفت فاز وجود دارد که هر کدام دارای مزایا و معایب خاص خود هستند. برای هر سیستم مخابرات رادیویی که قصد طراحی آن را داشته باشیم، باید نوع بهینه مدولاسیون کلیدزنی شیفت فاز را انتخاب کنیم و برای این کار داشتن دانش قبلی درباره اصول کار آن ها ضروری است.
مانند سایر انواع تکنیکهای مدولاسیون کلیدزنی شیفت، نقاط یا حالات تعریف شدهای وجود دارد که از آنها برای «علامتدهی» (Signalling) بیتهای داده استفاده میشود. فرم پایهای و ساده مدولاسیون کلیدزنی شیفت فاز، نوع باینری یا BPSK است که گاهی به آن مدولاسیون «کلیدزنی معکوس فاز» (Phase Reversal Keying) یا PRK نیز میگویند. یک سیگنال دیجیتال هنگام معکوس شدن فاز، بین ۰ تا ۱ تغییر میکند. به عبارت دیگر، با شیفت حالت دادهها، فاز نیز به اندازه ۱۸۰ درجه شیفت پیدا میکند.
اصول کار مدولاسیون کلیدزنی شیفت فاز باینری یا BPSK
همان طور که گفتیم، تکنیک مدولاسیون کلیدزنی شیفت فاز باینری سادهترین نوع مدولاسیون PSK به شمار میآید. در این تکنیک مدولاسیون، هر المان علامتدهی یا پیام، توسط یک بیت داده تکی (۰ یا ۱) نشان داده میشود و سیگنال حامل در طول فرایند انتقال دو نوع تغییر فاز (معکوس شدن فاز) از ۰ به ۱۸۰ درجه و یا ۱۸۰ درجه به ۰ درجه را باید تجربه کند. در مدولاسیون کلیدزنی شیفت فاز دنباله بیتهای دیجیتالی را ابتدا به یک سیگنال دوقطبی NRZ تبدیل میکنیم که این سیگنال به صورت مستقیم میتواند سیگنال حامل را مدوله کند.
در تصویر زیر نمایی از سیگنال پیام و سیگنال مدولاسیون کلیدزنی شیفت فاز باینری یا BPSK نشان داده شده است.

بیان ریاضی مدولاسیون کلیدزنی شیفت فاز باینری
فرض کنید سیگنال حامل توسط رابطه زیر نشان داده شود:
در این رابطه پیک سیگنال حامل با نماد A نشان داده شده است. زمانی که مقاومت بار برابر با یک اهم استاندارد فرض شود، اتلاف توان با استفاده از رابطه زیر به دست میآید:
فلسفه اساسی مدولاسیون کلیدزنی شیفت فاز باینری این است که یک تغییر به اندازه ۱۸۰ درجه در فاز را میتوان متناظر با تغییر در دنباله بیتهای پیام (از ۰ به یک یا از ۱ به ۰) در نظر گرفت. فرض کنید سیگنال حامل برای مقدار ۱ به صورت زیر باشد:
در این صورت، در مدولاسیون کلیدزنی شیفت فاز باینری، سیگنال حامل برای مقدار ۰ در سیگنال پیام را میتوان به صورت زیر در نظر گرفت:
همان طور که میدانیم، است، بنابراین سیگنال را میتوان به صورت زیر نوشت:
در نتیجه سیگنال BPSK را به صورت زیر به دست می آوریم:
در رابطه فوق، برای انتقال سیگنال باینری ۱، برابر با 1+ و برای انتقال سیگنال باینری 0 برابر با 1- در نظر گرفته میشود. همان طور که از روابط بالا مشخص است، سیگنال حامل به ازای تغییر در مقدار سیگنال پیام، به اندازه ۱۸۰ درجه شیفت فاز مییابد.
مدولاسیون BPSK
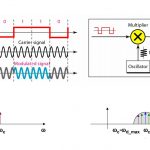
در تصویر زیر یک بلوک دیاگرام از نحوه تولید سیگنال مدولاسیون کلیدزنی شیفت فاز باینری یا BPSK نشان داده شده است.

همان طور که در این تصویر دیده میشود، سیستم مدولاسیون BPSK از یک انکودر NRZ تشکیل شده است. همچنین مدولاتور ضربی یا «تعدیل شده» (Balanced Modulator) و مولد سیگنال حامل نیز از سایر بخشهای یک مدولاتور BPSK به شمار میآیند. سیگنال پیام باینری به ورودی انکودر NRZ دوقطبی وارد میشود که وظیفه تبدیل ورودی باینری به رشته NRZ دو قطبی معادل یا را بر عهده دارد.

این سیگنال NRZ دو قطبی به مدولاتور تعدیل شده داده میشود که یکی دیگر از ورودهای آن از مدار مولد سیگنال حامل دریافت میشود. بنابراین سیگنال باینری سیگنال حامل را مدوله میکند و در نهایت یک سیگنال مدولاسیون شیفت فاز یافته با نام BPSK تولید میشود. در تصویر زیر سیگنالهای مختلفی که برای تولید سیگنال مدولاسیون BPSK مورد استفاده قرار میگیرند، نشان داده شده است.

در نمودار اول دنباله بیتهای باینری و در نمودار دوم دنباله NRZ دوقطبی نشان داده شده است. برای مدوله کردن سیگنال حامل (نمودار سوم) مورد استفاده قرار میگیرد. در نهایت سیگنال مدولاسیون کلیدزنی شیفت فاز باینری در نمودار چهارم دیده میشود. همان طور که از این نمودارها میتوان دریافت، زمانی که بیتهای داده از ۰ به ۱ و یا از ۱ به ۰ تغییر حالت میدهند، در سیگنال BPSK فاز معکوس میشود. اگر دادههای سیگنال پیام از ۰ به ۱ تغییر یابند، در این صورت یک تغییر فاز مثبت وجود خواهد داشت، در حالی که اگر دنباله دادهها از ۱ به ۰ تغییر یابند، تغییر فاز مقداری منفی خواهد بود.
دمدولاسیون BPSK
در تصویر زیر نمایش بلوک دیاگرامی مربوط به یک مدار دمدولاتور BPSK «همدوس» (Coherent) نشان داده شده است.

ابتدا فرض میکنیم سیگنال دریافت شده در گیرنده دارای رابطه زیر باشد:
توجه کنید که مقدار شیفت فاز به میزان تاخیر زمانی بین گیرنده و فرستنده پیام بستگی دارد. سپس سیگنال را به یک مدار «قانون مربعی» (Square Law) اعمال میکنیم که در خروجی سیگنال با رابطه زیر را تولید میکند:
در اینجا فقط قسمت حامل از سیگنال در نظر گرفته شده است و از دامنه آن صرف نظر شده است. همان طور که میدانیم، رابطه مثلثاتی زیر برقرار است:
در نتیجه میتوانیم سیگنال حامل را بر اساس رابطه فوق بسط دهیم:
همچنین میتوانیم بنویسیم:
در این رابطه سطح DC برابر با است. سپس این سیگنال را به یک فیلتر میان گذر اعمال میکنیم. در ادامه سیگنال از یک مدار مقسم فرکانسی (تقسیم بر ۲) عبور میکند و به همین دلیل یک سیگنال حامل با فرکانس به دست میآید. سپس سیگنال حامل را در سیگنال ورودی ضرب میکنیم و نتیجه به صورت زیر به دست میآید:
بنابراین سیگنالی که در خروجی به دست میآید به صورت زیر است:
سپس این سیگنال به واحد انتگرالگیری و «همگام کننده بیت» (Bit Synchronizer) وارد میشود. در واحد انتگرالگیری و با کمک همگام کننده بیت، از سیگنال در طول بازه ۱ بیتی انتگرال گرفته میشود. در واقع واحد همگام کننده بیت «دوره زمانی» (Duration) بیت را مدیریت میکند. پس از یک دوره زمانی کامل بیت، همگام کننده را میبندد و خروجی مدار انتگرالگیر به عنوان ورودی به «مدار تصمیمگیر» (Decision Device) اعمال میشود.
همچنین زمانی که برای یک مدت زمان باز و بسته شود، فرایند پردازش به طریق مشابه ادامه مییابد و ولتاژ انتگرالگیر به مقدار ۰ ریست میشود. سپس توسط انتگرالگیر از بیت بعدی انتگرال گرفته میشود و چرخه همچنان تکرار میشود. مدار تصمیمگیر در نهایت قادر به تولید داده باینری معادل با سیگنال پیام خواهد بود.
مزایا و معایب مدولاسیون کلیدزنی شیفت فاز باینری
مدولاسیون کلیدزنی شیفت فاز یا BPSK نیز مانند سایر روشهای مدولاسیون معایب و مزایای خاص خود را دارد. مزایای این تکنیک مدولاسیون به صورت زیر است:
- این نوع مدولاسیون امکان انتقال موثر سیگنالهای فرکانس رادیویی را فراهم میکند.
- در تکنیک مدولاسیون BPSK ایمنی سیگنال در برابر نویز بهتر است.
- در مقایسه با سایر تکنیکهای مدولاسیون مانند «مدولاسیون کلیدزنی شیفت فرکانس باینری» یا BFSK، در مدولاسیون BFSK از پهنای باند کمتری استفاده میکند.
اما مدولاسیون کلیدزنی شیفت فاز معایب خاص خود را نیز دارد که از آن جمله میتوان به موارد زیر اشاره کرد:
- آشکارسازی یا دمدولاسیون سیگنال BPSK فرایندی نسبتا پیچیده است.
- گسستگی فاز گاهی اوقات منجر به تغییر در دامنه سیگنال میشود.
اگر این مطلب برای شما مفید بوده است، آموزشهای زیر نیز به شما پیشنهاد میشوند:
- مجموعه آموزشهای مهندسی مخابرات
- آموزش مخابرات ۱
- مجموعه آموزشهای مهندسی الکترونیک
- آموزش مبانی الکترونیک – مفاهیم تئوریک به همراه شبیه سازی عملی و کاربردی
- مدولاسیون SSBSC چیست؟ — به زبان ساده
- انرژی و توان سیگنال — از صفر تا صد
- مدولاسیون فاز — راهنمای جامع
^^











عالی بود -تشریح و روابط کامل
بسیار آموزش کارآمدی بود. باتشکر از نویسنده مقاله.