شما در حال مطالعه نسخه آفلاین یکی از مطالب «مجله فرادرس» هستید. لطفاً توجه داشته باشید، ممکن است برخی از قابلیتهای تعاملی مطالب، مانند امکان پاسخ به پرسشهای چهار گزینهای و مشاهده جواب صحیح آنها، نمایش نتیجه آزمونها، پاسخ تشریحی سوالات، پخش فایلهای صوتی و تصویری و غیره، در این نسخه در دسترس نباشند. برای دسترسی به نسخه آنلاین مطلب، استفاده از کلیه امکانات آن و داشتن تجربه کاربری بهتر اینجا کلیک کنید.
در آموزشهای پیشین مجله فرادرس، با نمایش تابع تبدیل سیستمهای پیوسته در زمان بحث کردیم. در این آموزش با تابع تبدیل پالسی آشنا میشویم که در سیستمهای گسسته در زمان کاربرد دارد.
وقتی سیستمی با داده نمونهبرداری شده یا سیگنال دیجیتال r∗(t) داشته باشیم، نمودار بلوکی متناظر با آن به صورت شکل ۱ خواهد بود.
شکل ۱: نمودار بلوکی یک سیستم با ورودی نمونهبرداری شده
خروجی سیستم C(s)=G(s)R∗(s) است. به سختی میتوان با تابع تبدیل سیستم بالا کار کرد، زیرا شامل ترکیبی از مؤلفههای آنالوگ و دیجیتال است. بنابراین، برای سادگی کار کردن با آن، میتوان مشخصههای سیستم را با یک تابع تبدیل توصیف کرد که r∗(t) را به c∗(t) مربوط میکند.
اکنون، اگر z=eTs را در عبارت قبلی جایگذاری کنیم، مستقیماً به تابع تبدیل G(z) خواهیم رسید:
G(z)=R(z)C(z)
همچنین، G(z) را میتوان به صورت زیر نیز تعریف کرد:
G(z)=k=0∑∞g(kT)z−k
که در آن، g(kT) دنباله پاسخ ضربهg(t) تابع تبدیل G(s) سیستم را نشان میدهد. دنباله g(kT) با k=0,1,... به عنوان یک دنباله ضربه شناخته میشود.
در نتیجه میتوان گفت:
تابع تبدیل پالسی پالسی یا تابع تبدیل Z، سیستم گسسته را تنها در لحظات نمونهبرداری نشان میدهد. به عبارت دیگر، اطلاعات خروجی بین لحظات نمونهبرداری از دست میرود.
از آنجایی که ورودی سیستم گسسته با خروجی یک نمونهبردار توصیف میشود، برای همه موارد عملی، میتوان به سادگی نمونهبردار را r∗(t) در نظر گرفت.
یک راه دیگر برای رسیدن به G(z)=R(z)C(z) به صورت زیر است (وقتی r∗(t) یک تابع ضربه باشد):
c∗(t)=g∗(t) when r∗(t) is an impulse function =k=0∑∞g(kT)δ(t−kT)
این نتیجه مورد انتظار بود، زیرا نگهدار مرتبه صفر، سیگنال گسسته را برای یک دوره نمونهبرداری نگه میدارد، بنابراین، تبدیل z نگهدار مرتبه صفر سیگنال نمونهبرداری شده اصلیاش را نتیجه میدهد.
یک پیکربندی رایج در سیستم گسسته این است که مطابق شکل ۴، یک دستگاه نمونهبردار و نگهدار (S/H) قبل از سیستم خطی با تابع تبدیل G(s) قرار دهیم. اکنون میخواهیم رابطه بین r∗(t) و c∗(t) را پیدا کنیم.
شکل ۴: نمودار بلوکی یک سیستم در حضور فرایند نمونهبردار و نگهدار
که در آن، (1−z−1)Z[sG(s)] تابع تبدیل z دستگاه نمونهبردار/نگهدار و سیستم خطی است.
قبلاً گفتیم که وقتی فرکانس نمونهبرداری به بینهایت میل کند، یک سیستم گسسته را میتوان به عنوان سیستمی پیوسته در نظر گرفت. البته، این بدان معنی نیست که اگر سیگنال r(t) با یک نمونهبردار ایدهآل نمونهبرداری شود، آنگاه r∗(t) را با قرار دادن زمان نمونهبرداری T برابر با صفر به r(t) رساند. اگر خروجی سیگنال نمونهبرداری شده از یک دستگاه نمونهبردار عبور کند، میتوان با صفر قرار دادن زمان نمونهبرداری T، سیگنال اصلی r(t) را بازیابی کرد. با توجه به شکل ۴، داریم:
T→0limH(s)=R(s)
مثال
ورودی r(t)=e−atus(t) را در نظر بگیرید که در آن، us(t) تابع پله واحد است.
تبدیل لاپلاس این ورودی به صورت زیر است:
R(s)=s+a1
تبدیل لاپلاس سیگنال نمونهبرداری شده r∗(t) نیز برابر است با:
R∗(s)=eTs−e−aTeTs
تبدیل لاپلاس خروجی بعد از ZOH به صورت زیر است:
H(s)=Gho(s)R∗(s)=s1−e−Ts⋅eTs−e−aTeTs
وقتی T به صفر میل کند، داریم:
T→0limH(s)=Tto0lim=s1−e−TseTs−e−aTeTs
حد بالا را میتوان با استفاده از قاعده هوپیتال محاسبه کرد. طبق این قاعده، اگر x→alimf(x)=0/∞ و x→alimg(x)=0/∞، آنگاه x→alimg(x)f(x)=x→alimg′(x)f′(x).
در این مثال، x=T، f(T)=s1−e−Ts و g(T)=eTseTs−e−aT. وقتی T به صفر میل میکند، این عبارتها نیز به صفر میل میکنند. بنابراین:
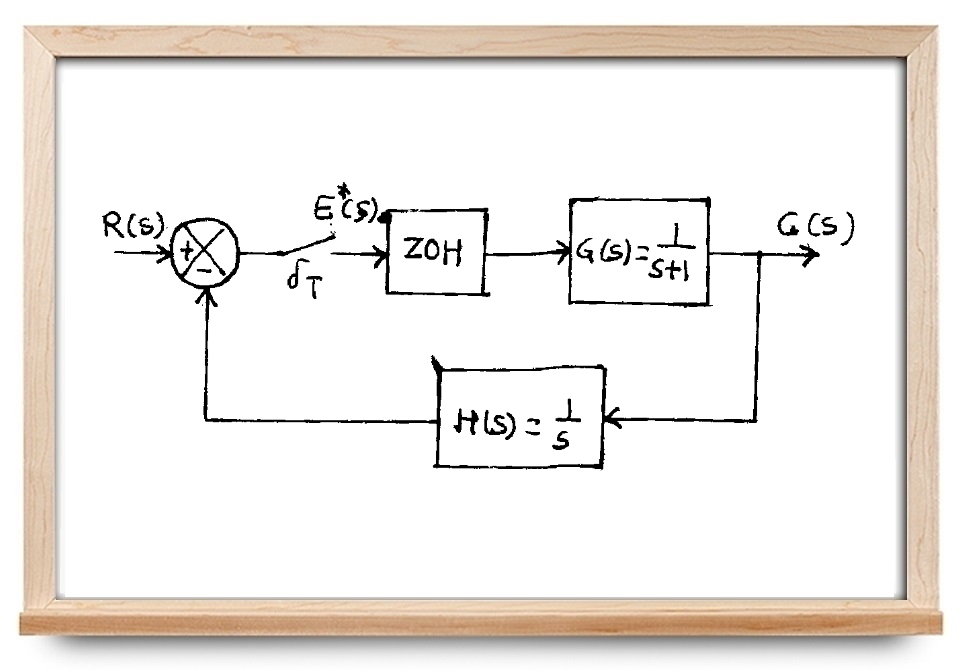
شکل ۵ یک سیستم حلقهبسته را با یک نمونهبردار در مسیر پیشرو نشان میدهد.
شکل ۵: نمودار بلوکی یک سیستم حلقهبسته با نمونهبردار در مسیر پیشرو
میخواهیم رابطه بین ورودی و خروجی این سیستم را بنویسیم. در سیستم بالا، خروجی نمونهبردار به عنوان ورودی سیستم عمل میکند. ورودی نمونهبردار نیز به عنوان یک خروجی دیگر در نظر گرفته میشود. بنابراین، روابط ورودی-خروجی را میتوان به صورت زیر نوشت:
توجه کنید که نمیتوان تابع تبدیل ورودی-خروجی این سیستم را با R∗(s)C∗(s) یا R(z)C(z) تعریف کرد. از آنجایی که ورودی r(t) نمونهبرداری نشده است، سیگنال نمونهبرداری شده r∗(t) وجود ندارد. خروجی پیوسته C(s) را میتوان بر اساس ورودی توصیف کرد:
C(s)=G(s)R(s)−1+GH∗(s)G(s)H(s)GR∗(s)
معادله مشخصه
معادله مشخصه نقش مهمی در مطالعه سیستمهای خطی ایفا میکند. همانطور که میدانیم، یک سیستم گسسته LTI مرتبه n را میتوان با یک معادله تفاضلی مرتبه n نمایش داد:
معادله مشخصه با صفر قرار دادن مخرج G(z) به دست میآید:
zn+an−1zn−1+⋯+a1z+a0=0
مثال
تابع تبدیل مسیر پیشرو G(s)=s(s+2)2 و تابع تبدیل فیدبک 1 را در نظر بگیرید. اگر نمونهبردار در مسیر پیشرو قرار داشته باشد، معادله مشخصه سیستم را برای زمان نمونهبرداری T=0.1 ثانیه به دست آورید.
حل:
R(z)C(z)=1+GH(z)G(z)
از آنجایی که تابع تبدیل فیدبک برابر با 1 است، داریم:
سید سراج حمیدی دانشآموخته مهندسی برق است و به ریاضیات و زبان و ادبیات فارسی علاقه دارد. او آموزشهای مهندسی برق، ریاضیات و ادبیات مجله فرادرس را مینویسد.
شما در حال مطالعه نسخه آفلاین یکی از مطالب «مجله فرادرس» هستید. لطفاً توجه داشته باشید، ممکن است برخی از قابلیتهای تعاملی مطالب، مانند امکان پاسخ به پرسشهای چهار گزینهای و مشاهده جواب صحیح آنها، نمایش نتیجه آزمونها، پاسخ تشریحی سوالات، پخش فایلهای صوتی و تصویری و غیره، در این نسخه در دسترس نباشند. برای دسترسی به نسخه آنلاین مطلب، استفاده از کلیه امکانات آن و داشتن تجربه کاربری بهتر اینجا کلیک کنید.