شما در حال مطالعه نسخه آفلاین یکی از مطالب «مجله فرادرس» هستید. لطفاً توجه داشته باشید، ممکن است برخی از قابلیتهای تعاملی مطالب، مانند امکان پاسخ به پرسشهای چهار گزینهای و مشاهده جواب صحیح آنها، نمایش نتیجه آزمونها، پاسخ تشریحی سوالات، پخش فایلهای صوتی و تصویری و غیره، در این نسخه در دسترس نباشند. برای دسترسی به نسخه آنلاین مطلب، استفاده از کلیه امکانات آن و داشتن تجربه کاربری بهتر اینجا کلیک کنید.
در آموزشهای قبلی مجله فرادرس، با مفاهیم کنترل بهینه و پیادهسازی آن در متلب آشنا شدیم. در این آموزش، درباره کنترل بهینه گسسته بحث خواهیم کرد. پیشنهاد میکنیم قبل از مطالعه این مطلب، آموزش «کنترل بهینه در متلب» را مطالعه کنید.
تحت شرایط حالت ماندگار یا فرض زمان بینهایت، P[k]=P[k+1] و معادله ریکاتی به رابطه زیر کاهش مییابند:
P=AT+AT(I+PBR−1BT)−1PA+Q
با توجه به فرمول دوم، معادله ریکاتی را میتوان به صورت زیر نوشت:
P=ATPA−ATPB(R+BTPB)−1BTPA+Q
توجه کنید که دو فرم معادله ریکاتی معادل هستند و با استفاده از لم معکوس ماتریس میتوان هر یک را به دیگری تبدیل کرد.
جواب معادله ریکلاتی جبری گسسته را میتوان با استفاده از دستور "dare" در متلب پیادهسازی کرد:
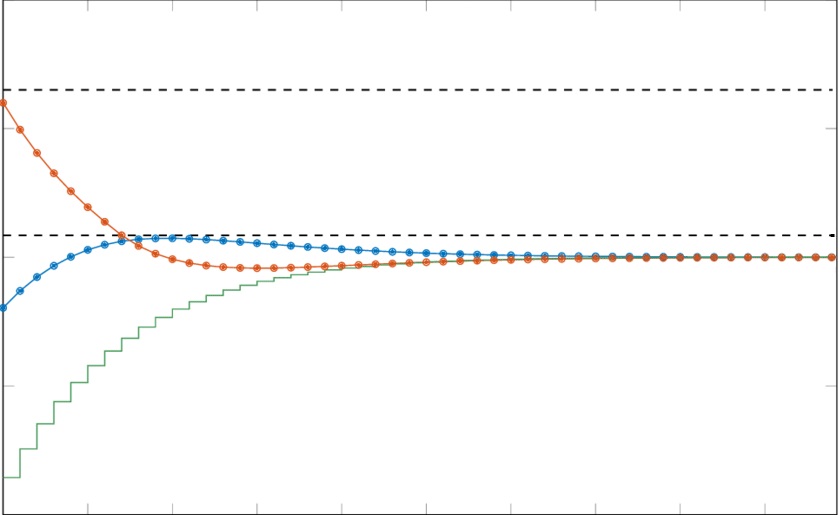
نتیجه اجرای برنامه بالا، نمودارهای زیر خواهد بود:
برای زمان به اندازه کافی بزرگ، جواب با زمان نامحدود و LQR با زمان محدود، سیگنال کنترل مشابهی خواهند داشت. البته وقتی زمان نهایی ثابت باشد، روش زمان نامحدود با شکست مواجه میشود. شکل زیر مقایسه خروجیهای زمان محدود و زمان نامحدود را برای زمانهای نهایی بزرگ نشان میدهد. همانطور که میبینیم، عملکرد کنترلکننده در دو حالت برابر است.
تذکر: جواب LQR با استفاده از توابع "care" و "dare" فقط به مسائلی با زمان نامحدود قابل اعمال هستند.
شرایط لازمی را که کنترلکننده بهینه باید در آن صدق کند به دست آوردیم. این شرایط را به مسائل LQR گسسته اعمال کردیم و یک روش محاسبه کنترل بهینه را برای خطای صفر در زمان محدود دیدیم. البته، روش بالا محدودیتهایی نیز دارد:
همه توابع هزینه را نمیتوان به صورت مسئله LQR بیان کرد. حالتی را در نظر بگیرید که میخواهیم زمان را کمینه کنیم.
فرمولبندیهای LQR برای شرایطی که قیود اضافه به سیستم اعمال شود به خوبی تعمیمیافته نیستند.
برای قیود نامساوی کنترل، جواب کنترل LQR به مقادیری خاصی محدود میشود.
کار با حالت یا ترکیب حالت-کنترل دشوارتر است و شرایط بهینگی منتجه بسیار پیچیده خواهد بود.
اگر این مطلب برای شما مفید بوده است، آموزشهای زیر نیز به شما پیشنهاد میشوند:
سید سراج حمیدی دانشآموخته مهندسی برق است و به ریاضیات و زبان و ادبیات فارسی علاقه دارد. او آموزشهای مهندسی برق، ریاضیات و ادبیات مجله فرادرس را مینویسد.
شما در حال مطالعه نسخه آفلاین یکی از مطالب «مجله فرادرس» هستید. لطفاً توجه داشته باشید، ممکن است برخی از قابلیتهای تعاملی مطالب، مانند امکان پاسخ به پرسشهای چهار گزینهای و مشاهده جواب صحیح آنها، نمایش نتیجه آزمونها، پاسخ تشریحی سوالات، پخش فایلهای صوتی و تصویری و غیره، در این نسخه در دسترس نباشند. برای دسترسی به نسخه آنلاین مطلب، استفاده از کلیه امکانات آن و داشتن تجربه کاربری بهتر اینجا کلیک کنید.