شما در حال مطالعه نسخه آفلاین یکی از مطالب «مجله فرادرس» هستید. لطفاً توجه داشته باشید، ممکن است برخی از قابلیتهای تعاملی مطالب، مانند امکان پاسخ به پرسشهای چهار گزینهای و مشاهده جواب صحیح آنها، نمایش نتیجه آزمونها، پاسخ تشریحی سوالات، پخش فایلهای صوتی و تصویری و غیره، در این نسخه در دسترس نباشند. برای دسترسی به نسخه آنلاین مطلب، استفاده از کلیه امکانات آن و داشتن تجربه کاربری بهتر اینجا کلیک کنید.
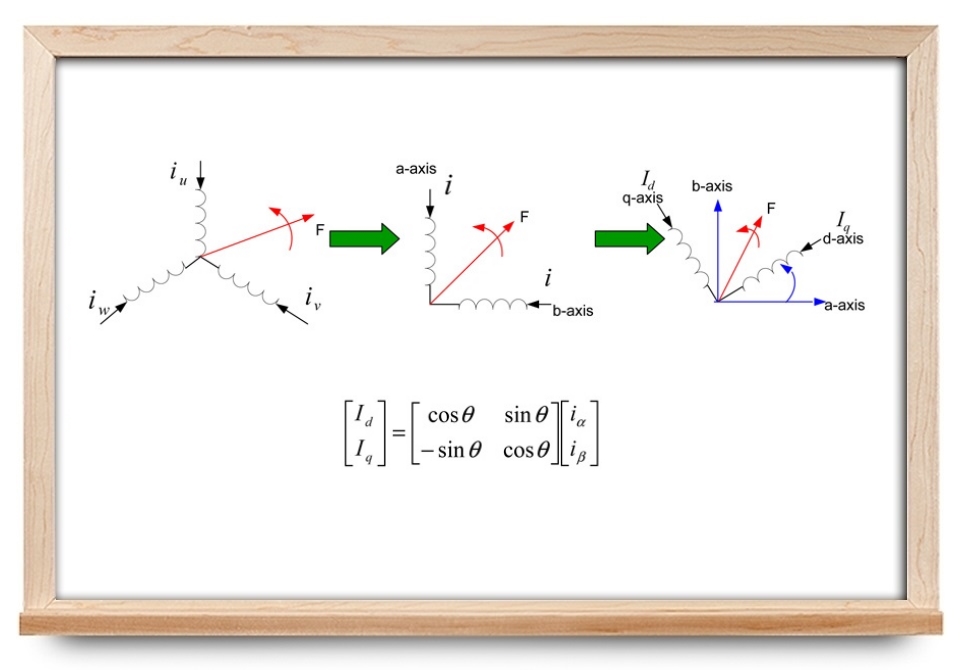
در آموزشهای قبلی مجله فرادرس، با تبدیل کلارک آشنا شدیم. در این آموزش، تبدیل پارک (Park Transform) را معرفی خواهیم کرد. تبدیل پارک که تبدیل مستقیم-عمود-صفر یا dq0 نیز نامیده میشود، تبدیل برداری فضایی سه فاز حوزه زمان از یک دستگاه مختصات با فاز ساکن (ABC) به دستگاه مختصات چرخان (dq0) است.
مشابه تبدیل کلارک، مؤلفه صفر بالا، مانند توالی صفر در تبدیل مؤلفههای متقارن است. برای مثال، مؤلفه توالی صفر برای هر دو تبدیل dq0 و مؤلفههای متقارن، برابر با 31(Ua+Ub+Uc) است.
سابقه پیدایش تبدیل پارک
هرچند تبدیل dq0 قبل از تبدیل کلارک در سال ۱۹۲۹ توسط «رابرت اچ. پارک» (Robert H. Park) معرفی شده بود، اما این تبدیل، اساساً تعمیمی از تبدیل کلارک است که با اعمال تبدیل زاویه، یک قاب مرجع ساکن را به یک قاب چرخان سنکرون تبدیل میکند. قاب مرجع سنکرون را میتوان بهگونهای تنظیم کرد که با ولتاژ (مثلاً در مبدلهای منبع ولتاژ) یا با جریان (مثلاً در مبدلهای منبع جریان) بچرخد.
تبدیل dq0 در سیستمهای متعادل
در ادامه تبدیل dq0 را برای سیستمهای ولتاژ و جریان سه فاز بیان میکنیم.
توجه کنید که مؤلفه صفر در قاب dq0، مشابه قاب αβ0 است. علاوه بر این، همانطور که در تبدیل کلارک اشاره کردیم، مؤلفه صفر سیستمهای سه فاز متعادل برابر با صفر است. در نتیجه، در ادامه، از مؤلفه صفر چشمپوشی میکنیم.
یک ولتاژ سه فاز متعادل با مؤلفههای αβ0 به صورت زیر است:
uαuβu0=Umcos(ωt)Umsin(ωt)0
تبدیل dq0 ولتاژ برابر است با:
[uduq]=[cosθ−sinθsinθcosθ][uαuβ]
فرض کنید از یک قاب مرجع ولتاژ استفاده و قاب سنکرون را با ولتاژ همراستا میکنیم. بنابراین، θ=ωt و خواهیم داشت:
مشاهده میکنیم که بهدلیل همراستا بودن چرخش قاب سنکرون با ولتاژ، مؤلفه d متناظر با اندازه ولتاژ و مؤلفه q برابر با صفر است. تبدیل یک ولتاژ از قاب αβ ساکن به قاب dq در شکل زیر نشان داده شده است.
تبدیل معکوس به صورت زیر است:
[uαuβ]=[cosθsinθ−sinθcosθ][uduq]
تبدیل dq0 جریانهای سه فاز متعادل
تبدیل dq0 را میتوان مشابه ولتاژ، به جریان نیز اعمال کرد. معادلات زیر، یک جریان مربعی دوفاز در قاب ساکن (αβ0) نشان میدهد (δ زاویه در جایی است که جریان عقبتر از ولتاژ است):
IαIβI0=Imcos(ωt−δ)Imsin(ωt−δ)0
این سیستم جریان را به یک قاب دوفاز سنکرون (dq0) تبدیل میکنیم:
توان اکتیو و راکتیو لحظهای یک مجموعه از ولتاژها و جریانهای دوفاز (dq) را میتوان به صورت زیر نوشت:
pq=udid+uqiq=uqid−udiq
قبلاً دیدیم که وقتی قاب سنکرون بر ولتاژ منطبق باشد، مؤلفه مربعی uq برابر با صفر است. بنابراین، معادلات توان به روابط زیر کاهش مییابد:
pq=udid=−udiq
معادلات بالا نشان میدهند که کنترل توان اکتیو و راکتیو با کنترل مؤلفههای جریان dq (id و iq) امکانپذیر است.
خلاصه تبدیل dq0 در سیستمهای متعادل
مزایای تبدیل dq0 در سیستمهای سه فاز متعادل بهشرح زیر است:
تبدیل dq0، مقادیر AC سه فاز (برای مثال ua، ub و uc) را به دو کمیت DC (مثلاً ud و uq) کاهش میدهد. در سیستمهای متعادل، مؤلفه صفر، برابر با صفر است. مقادیر DC، فیلتر کردن و کنترل را آسانتر میکنند.
توان اکتیو و راکتیو را میتوان مستقلاً و با کنترل مؤلفههای dq کنترل کرد.
فرمولبندی ناوَردای توان
تبدیل پارک کلاسیک، ناوردای توان نیست، یعنی توان لحظهای محاسبهشده متغیرها در قاب dq0، با توان محاسبهشده در قاب مرجع مختصات خنثی برابر نیست. یک فرمول ناوردای توان تبدیل dq0 به صورت زیر است:
سید سراج حمیدی دانشآموخته مهندسی برق است و به ریاضیات و زبان و ادبیات فارسی علاقه دارد. او آموزشهای مهندسی برق، ریاضیات و ادبیات مجله فرادرس را مینویسد.
سلام ، لطف میکنید به زبان ساده بیان کنید واقعا باتبدیل پارک چه کاری انجامیشه واگر انجام ندیم چی میشه؟
سعید محمدقلیان
باسلام واحترام
ضمن تشکر از زحمات و نکات آموزنده وپر محتوای فرادرس.خواهشا راهنمایی فرمایید
تبدیل پارک زیر مجموعه کدام بخش از آموزش های برق میباشد؟(مدار یا ریاضیات مهندسی ویا بررسی سیستم….)
ایا فیلم آموزشی دارد؟
ممنون میشم راهنمایی فرمایید
سید سراج حمیدی
سلام سعید عزیز.
تبدیل پارک معمولاً در درس «تئوری جامع ماشینهای الکتریکی» در دوره کارشناسی ارشد ارائه میشود. فرادرس بهزودی این آموزش را منتشر خواهد کرد. برای اطلاعات بیشتر، به این لینک مراجعه کنید. البته از آموزش «موتورهای بدون جاروبک BLDC و PMSM» نیز میتوانید برای آشنایی با تبدیل پارک استفاده کنید.
موفق باشید.
شما در حال مطالعه نسخه آفلاین یکی از مطالب «مجله فرادرس» هستید. لطفاً توجه داشته باشید، ممکن است برخی از قابلیتهای تعاملی مطالب، مانند امکان پاسخ به پرسشهای چهار گزینهای و مشاهده جواب صحیح آنها، نمایش نتیجه آزمونها، پاسخ تشریحی سوالات، پخش فایلهای صوتی و تصویری و غیره، در این نسخه در دسترس نباشند. برای دسترسی به نسخه آنلاین مطلب، استفاده از کلیه امکانات آن و داشتن تجربه کاربری بهتر اینجا کلیک کنید.




















سلام ، لطف میکنید به زبان ساده بیان کنید واقعا باتبدیل پارک چه کاری انجامیشه واگر انجام ندیم چی میشه؟
باسلام واحترام
ضمن تشکر از زحمات و نکات آموزنده وپر محتوای فرادرس.خواهشا راهنمایی فرمایید
تبدیل پارک زیر مجموعه کدام بخش از آموزش های برق میباشد؟(مدار یا ریاضیات مهندسی ویا بررسی سیستم….)
ایا فیلم آموزشی دارد؟
ممنون میشم راهنمایی فرمایید
سلام سعید عزیز.
تبدیل پارک معمولاً در درس «تئوری جامع ماشینهای الکتریکی» در دوره کارشناسی ارشد ارائه میشود. فرادرس بهزودی این آموزش را منتشر خواهد کرد. برای اطلاعات بیشتر، به این لینک مراجعه کنید. البته از آموزش «موتورهای بدون جاروبک BLDC و PMSM» نیز میتوانید برای آشنایی با تبدیل پارک استفاده کنید.
موفق باشید.