شما در حال مطالعه نسخه آفلاین یکی از مطالب «مجله فرادرس» هستید. لطفاً توجه داشته باشید، ممکن است برخی از قابلیتهای تعاملی مطالب، مانند امکان پاسخ به پرسشهای چهار گزینهای و مشاهده جواب صحیح آنها، نمایش نتیجه آزمونها، پاسخ تشریحی سوالات، پخش فایلهای صوتی و تصویری و غیره، در این نسخه در دسترس نباشند. برای دسترسی به نسخه آنلاین مطلب، استفاده از کلیه امکانات آن و داشتن تجربه کاربری بهتر اینجا کلیک کنید.
در این آموزش، تبدیلی را معرفی میکنیم که تحلیل مدارهای سهفاز را آسان میکند. «تبدیل کلارک» (Clarke Transform) یا تبدیل αβ0، یک تبدیل فضای برداری سیگنالهای حوزه زمان (مثلاً ولتاژ، جریان، شار و...) از یک سیستم سهفاز (ABC) به یک قاب مرجع دوفاز ساکن (αβ0) است. این تبدیل، بهیاد اولین زن در مهندسی برق، «ادیت کلارک» (Edith Clarke) نامگذاری شده است.
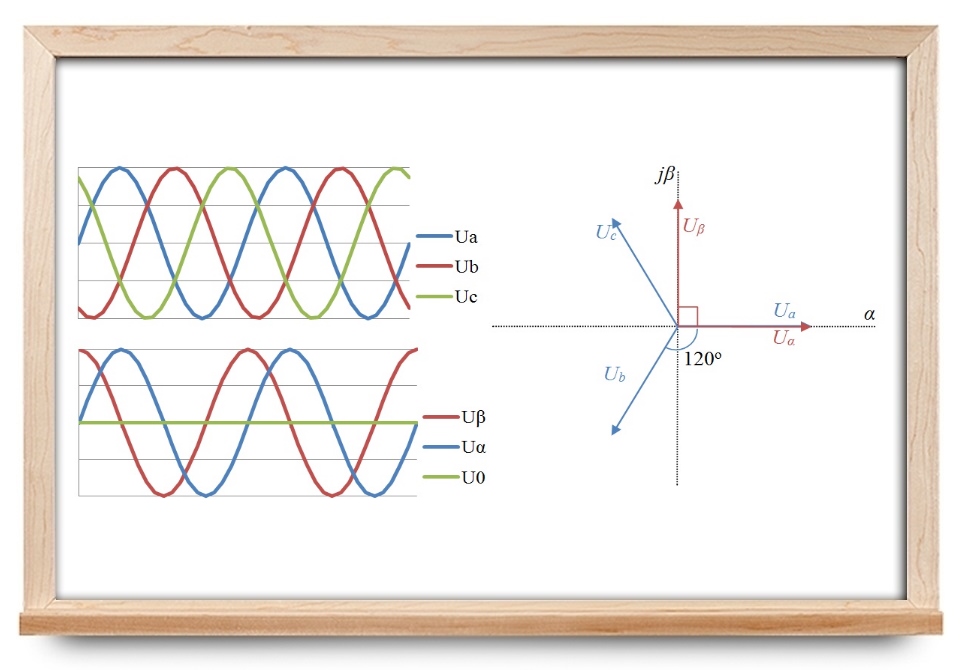
در قاب مرجع خنثی، توزیع ولتاژ سه محور ساکن Ua، Ub و Uc برابر با 120∘ است. مختصات کارتزین نیز رسم شده که در آن، Uα محور افقی در جهت فاز Ua، و محور عمودی بهاندازه 90∘ نسبت به Uβ اختلاف فاز دارد. اندازه پریونیت بردارهای Uα و Uβ برابر است.
ولتاژهای سهفاز روی محورهای a، b و c با زمان تغییر میکنند و میتوان آنها را به صورت جبری به ولتاژهای دوفاز تبدیل کرد که روی محورهای α و β با تبدیل زیر تغییر میکنند:
Tαβ0=321021−212321−21−2321
معکوس این تبدیل را میتوان برای تبدیل مقادیر از دوفاز به سهفاز بهکار برد:
Tαβ0−1=1−21−21023−23111
لازم به ذکر است که مؤلفه صفر تبدیل کلارک، مشابه مؤلفه توالی صفر در تبدیل مؤلفههای متقارن است؛ مثلاً برای ولتاژهای Ua، Ub و Uc مؤلفه توالی صفر برای هردو تبدیل کلارک و مؤلفههای متقارن برابر با 31(Ua+Ub+Uc) است.
میتوان دید که مشابه ولتاژ، Iα یک تابع کسینوسی، Iβ یک تابع سینوسی و U=I0 برابر با صفر است.
محاسبه ماتریس تبدیل
از آنجایی که ولتاژهای سهفاز را میتوان مانند بردارها در صفحه مختلط دوبعدی نمایش داد، برای تبدیل نیز میتوان از ایده مشابهی استفاده کرد. اگر از تجزیه برداری استفاده کنیم، داریم:
ضریب k1، یک ضریب تصحیح برای حذف اختلافهای تغییر مقیاس است که در اثر ضرب بهوجود آمده است. با توجه به مقادیر استاندارد، این مقادیر k1=32 و k0=21 هستند. البته انتخاب مقادیر دیگر برای ضرایب، ممکن است. یک رویکرد دیگر، کاهش بهره ماتریس به یک است.
اکنون بهرهای را محاسبه میکنیم که حاصل از ضرایب ماتریس برای سطر اول است.
G=12+(−21)2+(−21)2=23
نتیجه مشابه را میتوان برای سطر دوم به دست آورد. برای کاهش بهره به یک، باید ضرب زیر را به آن افزود:
k1=G1=32
و مقدار k0 را میتوان با استفاده از فرمولهای زیر محاسبه کرد:
سید سراج حمیدی دانشآموخته مهندسی برق است و به ریاضیات و زبان و ادبیات فارسی علاقه دارد. او آموزشهای مهندسی برق، ریاضیات و ادبیات مجله فرادرس را مینویسد.
با سلام و تشکر از مطلب تبدیل کلارک در برق. همکاران مقاله ای در زمینه تشخیص نوسان در شبکه برق از فالت به کمک تبدیل کلارک نوشته بوند لذا درباره این تبدیل اطلاعاتی از سایت شما دریافت کردم.
شما در حال مطالعه نسخه آفلاین یکی از مطالب «مجله فرادرس» هستید. لطفاً توجه داشته باشید، ممکن است برخی از قابلیتهای تعاملی مطالب، مانند امکان پاسخ به پرسشهای چهار گزینهای و مشاهده جواب صحیح آنها، نمایش نتیجه آزمونها، پاسخ تشریحی سوالات، پخش فایلهای صوتی و تصویری و غیره، در این نسخه در دسترس نباشند. برای دسترسی به نسخه آنلاین مطلب، استفاده از کلیه امکانات آن و داشتن تجربه کاربری بهتر اینجا کلیک کنید.




















با سلام و تشکر از مطلب تبدیل کلارک در برق. همکاران مقاله ای در زمینه تشخیص نوسان در شبکه برق از فالت به کمک تبدیل کلارک نوشته بوند لذا درباره این تبدیل اطلاعاتی از سایت شما دریافت کردم.