در آموزشهای قبلی مجله فرادرس درباره جبر خطی، با موضوعاتی مانند روش حذفی گاوس ، استقلال خطی و عملیات سطری مقدماتی آشنا شدیم. در این آموزش، درباره نگاشت یا تبدیل خطی بحث خواهیم کرد.
محتوای این مطلب جهت یادگیری بهتر و سریعتر آن، در انتهای متن به صورت ویدیویی نیز ارائه شده است.
تبدیل خطی
در این بخش، چند تعریف مربوط به تبدیل خطی را بیان میکنیم.
تعریف ۱
تابع T : R n → R m T:\mathbb{R}^n \to \mathbb{R}^m T : R n → R m x , y ∈ R n \mathbf{x}, \mathbf{y}\in \mathbb{R}^n x , y ∈ R n c ∈ R c\in \mathbb{R} c ∈ R
T ( x + y ) = T ( x ) + T ( y ) T ( \mathbf { x } + \mathbf { y } ) = T ( \mathbf { x } ) + T ( \mathbf { y } ) T ( x + y ) = T ( x ) + T ( y ) T ( c x ) = c T ( x ) T ( c \mathbf { x } ) = c T ( \mathbf { x } ) T ( c x ) = c T ( x )
تعریف ۲
فضای پوچ (Nullspace) N ( T ) \mathcal{N}(T) N ( T ) T : R n → R m T : \mathbb{R} ^ n \to \mathbb{R} ^ m T : R n → R m
N ( T ) = { x ∈ R n ∣ T ( x ) = 0 m } . \large \mathcal{N} ( T ) = \{ \mathbf { x } \in \mathbb{R} ^ n \mid T ( \mathbf { x } ) = \mathbf { 0 } _ m \} . N ( T ) = { x ∈ R n ∣ T ( x ) = 0 m } .
تعریف ۳
پوچی (Nullity) تبدیل T T T N ( T ) \mathcal{N}(T) N ( T )
تعریف ۴
برد R ( T ) \mathcal{R}(T) R ( T ) T : R n → R m T:\mathbb{R}^n\to \mathbb{R}^m T : R n → R m
R ( T ) = { y ∈ R m ∣ y = T ( x ) for some x ∈ R n } . \large \mathcal{R} ( T ) = \{ \mathbf { y } \in \mathbb{R} ^ m \mid \mathbf { y } = T ( \mathbf { x } ) \text{ for some } \mathbf { x } \in \mathcal{R}^n\}. R ( T ) = { y ∈ R m ∣ y = T ( x ) for some x ∈ R n } .
تعریف ۵
رتبه T T T R ( T ) \mathcal{R}(T) R ( T )
تعریف ۶
نمایش ماتریسی تبدیل خطی T : R n → R m T:\mathbb{R}^n \to \mathbb{R}^m T : R n → R m A A A m × n m \times n m × n x ∈ R n \mathbf{x}\in \mathbb{R}^n x ∈ R n T ( x ) = A x T(\mathbf{x})=A\mathbf{x} T ( x ) = A x
به طور خلاصه، فرض کنید T : R n → R m T:\mathbb{R}^n \to \mathbb{R}^m T : R n → R m
رابطه T ( 0 n ) = 0 m T(\mathbf{0}_n)=\mathbf{0}_m T ( 0 n ) = 0 m 0 n \mathbf{0}_n 0 n 0 m \mathbf{0}_m 0 m R n \mathbb{R} ^ n R n R m \mathbb{R}^m R m
نمایش ماتریسی A A A T : R n → R m T:\mathbb{R}^n \to \mathbb{R}^m T : R n → R m A = [ T ( e 1 ) , … , T ( e n ) ] A=[T(\mathbf{e}_1), \dots, T(\mathbf{e}_n)] A = [ T ( e 1 ) , … , T ( e n )] e 1 \mathbf{e}_1 e 1 ⋯ \cdots ⋯ e n \mathbf{e}_n e n R n \mathbb{R}^n R n
اگر A A A T T T
N ( T ) = N ( A ) \mathcal{N}(T)=\mathcal{N}(A) N ( T ) = N ( A ) R ( T ) = R ( A ) \mathcal{R}(T)=\mathcal{R}(A) R ( T ) = R ( A ) پوچی A A A T T T
رتبه T T T A A A
مثالها
در این بخش، چند مثال را بررسی میکنیم.
مثال ۱
دو تابع T : R 2 → R 2 T:\mathbb{R}^{2}\to\mathbb{R}^{2} T : R 2 → R 2 S : R 2 → R 2 S:\mathbb{R}^{2}\to\mathbb{R}^{2} S : R 2 → R 2
T ( [ x y ] ) = [ 2 x + y 0 ] , S ( [ x y ] ) = [ x + y x y ] . \large T \left( \begin {bmatrix} x \\ y \end {bmatrix} \right) = \begin {bmatrix} 2 x + y \\ 0 \end {bmatrix} , \; S \left( \begin {bmatrix} x \\ y \end {bmatrix} \right) = \begin {bmatrix} x + y \\ x y \end {bmatrix} . T ( [ x y ] ) = [ 2 x + y 0 ] , S ( [ x y ] ) = [ x + y x y ] .
خطی بودن تبدیلهای T T T S S S S ∘ T S\circ T S ∘ T
حل: برای بررسی اینکه T T T x , y ∈ R 2 \mathbf{x},\mathbf{y}\in\mathbb{R}^{2} x , y ∈ R 2
x = [ x 1 x 2 ] , y = [ y 1 y 2 ] , \large \mathbf { x } = \begin {bmatrix} x _ { 1 } \\ x _ { 2 } \end {bmatrix} , \; \mathbf { y } = \begin {bmatrix} y _ { 1 } \\ y _ { 2 } \end {bmatrix} , x = [ x 1 x 2 ] , y = [ y 1 y 2 ] ,
در نتیجه، داریم:
T ( x + y ) = T ( [ x 1 + y 1 x 2 + y 2 ] ) = [ 2 ( x 1 + y 1 ) + ( x 2 + y 2 ) 0 ] = [ 2 x 1 + x 2 0 ] + [ 2 y 1 + y 2 0 ] = T ( x ) + T ( y ) . \large \begin {align*} T \left( \mathbf { x } + \mathbf { y } \right) & = T \left( \begin {bmatrix} x _ { 1 } + y _ { 1 } \\ x _ { 2 } + y _ { 2 } \end {bmatrix} \right) = \begin {bmatrix} 2 ( x _ { 1 } + y _ { 1 } ) + ( x _ { 2 } + y _ { 2 } ) \\ 0 \end {bmatrix} \\ & = \begin{bmatrix} 2 x _ { 1 } + x _ { 2 } \\ 0 \end{bmatrix} + \begin {bmatrix} 2 y _ { 1 } + y _ { 2 } \\ 0 \end {bmatrix} = T ( \mathbf { x } ) + T ( \mathbf { y } ) . \end{align*} T ( x + y ) = T ( [ x 1 + y 1 x 2 + y 2 ] ) = [ 2 ( x 1 + y 1 ) + ( x 2 + y 2 ) 0 ] = [ 2 x 1 + x 2 0 ] + [ 2 y 1 + y 2 0 ] = T ( x ) + T ( y ) .
برای هر عدد اسکالر r r r
T ( r x ) = T ( r [ x 1 x 2 ] ) = T ( [ r x 1 r x 2 ] ) = [ 2 r x 1 + r x 2 0 ] = r [ 2 x 1 + x 2 0 ] = r T ( x ) . \large T ( r \mathbf { x } ) = T \left( r \begin {bmatrix} x _ { 1 } \\ x _ { 2 } \end {bmatrix} \right) = T \left( \begin {bmatrix} r x _ { 1 } \\ r x _ { 2 } \end{bmatrix} \right) = \begin {bmatrix} 2 r x _ { 1 } + r x _ { 2 } \\ 0 \end {bmatrix} = r \begin{bmatrix} 2 x _ { 1 } + x _ { 2 } \\ 0 \end{bmatrix} = r T ( \mathbf { x } ) . T ( r x ) = T ( r [ x 1 x 2 ] ) = T ( [ r x 1 r x 2 ] ) = [ 2 r x 1 + r x 2 0 ] = r [ 2 x 1 + x 2 0 ] = r T ( x ) .
در نتیجه، T T T
اکنون S S S S S S
S ( [ 1 0 ] ) = [ 1 0 ] , S ( [ 0 1 ] ) = [ 1 0 ] , S ( [ 1 1 ] ) = [ 2 1 ] . \large S \left ( \begin {bmatrix} 1 \\ 0 \end {bmatrix} \right ) = \begin {bmatrix} 1 \\ 0 \end {bmatrix} , \quad S \left ( \begin {bmatrix} 0 \\ 1 \end {bmatrix} \right ) = \begin {bmatrix} 1 \\ 0 \end {bmatrix} , \quad S \left ( \begin {bmatrix} 1 \\ 1 \end {bmatrix} \right ) = \begin {bmatrix} 2 \\ 1 \end {bmatrix} . S ( [ 1 0 ] ) = [ 1 0 ] , S ( [ 0 1 ] ) = [ 1 0 ] , S ( [ 1 1 ] ) = [ 2 1 ] .
بنابراین، شرط S ( x + y ) = S ( x ) + S ( y ) S(\mathbf{x}+\mathbf{y})=S(\mathbf{x})+S(\mathbf{y}) S ( x + y ) = S ( x ) + S ( y ) x , y ∈ R 2 \mathbf{x},\mathbf{y}\in\mathbb{R}^{2} x , y ∈ R 2 S S S
برای اثبات خطی بودن تبدیل S ∘ T S\circ T S ∘ T x ∈ R 2 \mathbf{x}\in\mathbb{R}^{2} x ∈ R 2
S ∘ T ( x ) = S ( T ( [ x y ] ) ) = S ( [ 2 x + y 0 ] ) \large S \circ T ( \mathbf { x } ) = S \left ( T \left ( \begin {bmatrix} x \\ y \end {bmatrix} \right ) \right ) = S \left ( \begin {bmatrix} 2 x + y \\ 0 \end {bmatrix} \right ) % = % \begin{bmatrix} % 2x+y+0 \\ (2x+y)\cdot 0 % \end{bmatrix} = \begin {bmatrix} 2 x + y \\ 0 \end {bmatrix} = T ( \mathbf { x } ) . S ∘ T ( x ) = S ( T ( [ x y ] ) ) = S ( [ 2 x + y 0 ] )
همانطور که میبینیم، S ∘ T = T S\circ T=T S ∘ T = T T T T S ∘ T S\circ T S ∘ T
مثال 2
تابع T : R 2 → R 3 T:\mathbb{R}^2 \to \mathbb{R}^3 T : R 2 → R 3
T ( [ x y ] ) = [ x + y x + 1 3 y ] \large T \left ( \, \begin {bmatrix} x \\ y \end {bmatrix} \, \right ) = \begin {bmatrix} x _ + y \\ x + 1 \\ 3 y \end {bmatrix} T ( [ x y ] ) = x + y x + 1 3 y
بررسی کنید که آیا این تابع یک تبدیل خطی است یا خیر.
حل: همانطور که گفتیم، هر تبدیل خطی باید بردار صفر را به بردار صفر تبدیل کند. در صورتی که، داریم:
T ( [ 0 0 ] ) = [ 0 + 0 0 + 1 3 ⋅ 0 ] = [ 0 1 0 ] ≠ [ 0 0 0 ] . \large T \left ( \, \begin {bmatrix} 0 \\ 0 \end {bmatrix} \, \right ) = \begin {bmatrix} 0 + 0 \\ 0 + 1 \\ 3 \cdot 0 \end {bmatrix} = \begin {bmatrix} 0 \\ 1 \\ 0 \end {bmatrix} \neq \begin {bmatrix} 0 \\ 0 \\ 0 \end {bmatrix} . T ( [ 0 0 ] ) = 0 + 0 0 + 1 3 ⋅ 0 = 0 1 0 = 0 0 0 .
بنابراین، تابع T T T [ 0 0 ] \begin {bmatrix} 0 \\ 0 \end {bmatrix} [ 0 0 ] [ 0 0 0 ] \begin {bmatrix} 0 \\ 0 \\ 0 \end {bmatrix} 0 0 0
یک راهحل دیگر این است که دو بردار زیر (یا هر دو بردار دیگری) را در نظر بگیریم:
u = [ 1 0 ] , v = [ 0 1 ] . \large \mathbf { u } = \begin {bmatrix} 1 \\ 0 \end {bmatrix} \text{, } \; \; \; \mathbf { v } = \begin {bmatrix} 0 \\ 1 \end {bmatrix} . u = [ 1 0 ] , v = [ 0 1 ] .
در نتیجه، خواهیم داشت:
T ( u ) + T ( v ) = T ( [ 1 0 ] ) + T ( [ 0 1 ] ) = [ 1 2 0 ] + [ 1 1 3 ] = [ 2 3 3 ] . \large T ( \mathbf { u } ) + T ( \mathbf { v } ) = T \left ( \, \begin {bmatrix} 1 \\ 0 \end {bmatrix} \, \right ) + T \left ( \, \begin {bmatrix} 0 \\ 1 \end {bmatrix} \, \right ) = \begin {bmatrix} 1 \\ 2 \\ 0 \end {bmatrix} + \begin {bmatrix} 1 \\ 1 \\ 3 \end {bmatrix} = \begin {bmatrix} 2 \\ 3 \\ 3 \end {bmatrix} . T ( u ) + T ( v ) = T ( [ 1 0 ] ) + T ( [ 0 1 ] ) = 1 2 0 + 1 1 3 = 2 3 3 .
از طرف دیگر، داریم:
T ( u + v ) = T ( [ 1 1 ] ) = [ 2 2 3 ] . \large T \left ( \, \mathbf { u } + \mathbf { v } \, \right ) = T \left ( \, \begin {bmatrix} 1 \\ 1 \end{bmatrix} \,\right) = \begin {bmatrix} 2 \\ 2 \\ 3 \end {bmatrix} . T ( u + v ) = T ( [ 1 1 ] ) = 2 2 3 .
بنابراین:
T ( u ) + T ( v ) ≠ T ( u + v ) , \large T ( \mathbf { u } ) + T ( \mathbf { v } ) \neq T \left ( \, \mathbf { u } + \mathbf { v } \, \right ) , T ( u ) + T ( v ) = T ( u + v ) ,
و در نتیجه، T T T
مثال 3
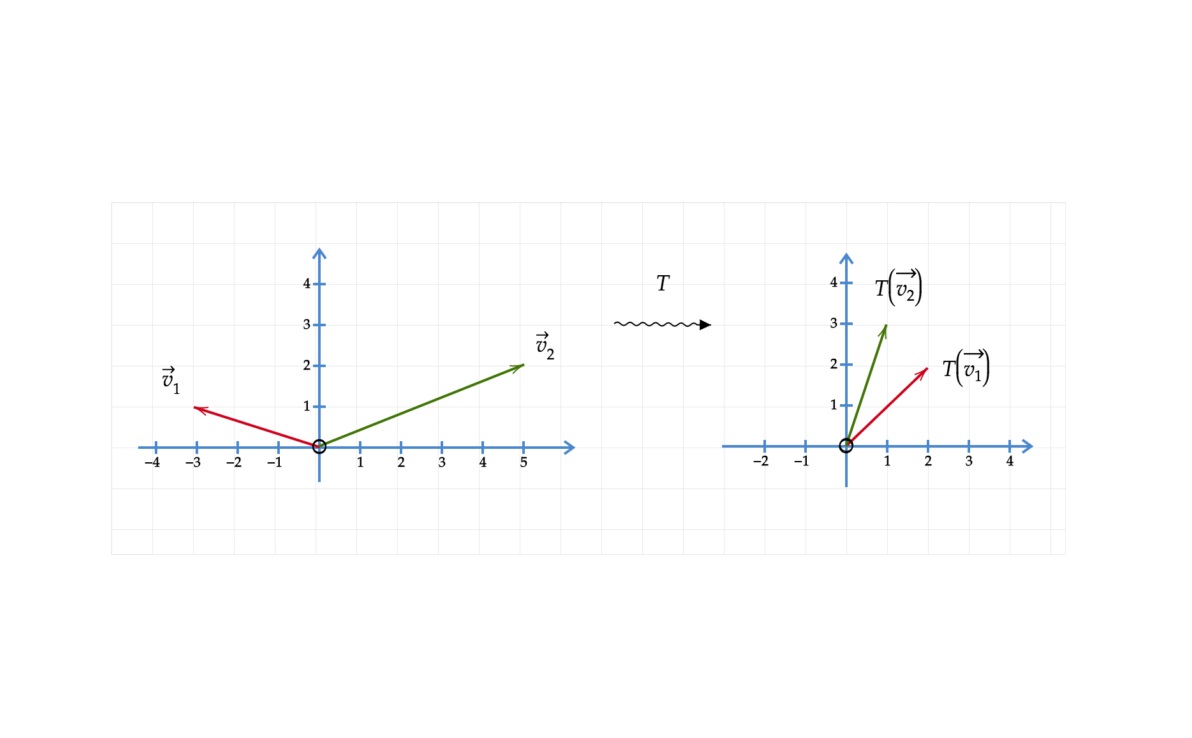
فرض کنید T : R 2 → R 2 T: \mathbb{R}^2\to \mathbb{R}^2 T : R 2 → R 2 v 1 \mathbf{v}_1 v 1 v 2 \mathbf{v}_2 v 2
نمایش ماتریسی A A A T T T
حل: با توجه به شکل بالا، داریم:
v 1 = [ − 3 1 ] , v 2 = [ 5 2 ] , \large \mathbf { v } _ 1 = \begin {bmatrix} - 3 \\ 1 \end {bmatrix} \text {, } \; \; \; \; \mathbf { v } _ 2 = \begin {bmatrix} 5 \\ 2 \end {bmatrix} , v 1 = [ − 3 1 ] , v 2 = [ 5 2 ] ,
و
T ( v 1 ) = [ 2 2 ] , T ( v 2 ) = [ 1 3 ] . \large T ( \mathbf { v } _ 1 ) = \begin {bmatrix} 2 \\ 2 \end {bmatrix} \text {, } \; \; \; \; \; T ( \mathbf { v } _ 2 ) = \begin {bmatrix} 1 \\ 3 \end {bmatrix} . T ( v 1 ) = [ 2 2 ] , T ( v 2 ) = [ 1 3 ] .
ماتریس A A A T T T x ∈ R 2 \mathbf{x}\in \mathbb{R}^2 x ∈ R 2 T ( x ) = A x T(\mathbf{x})=A\mathbf{x} T ( x ) = A x
در ادامه، ماتریس A A A
تساوی زیر را داریم:
[ 2 1 2 3 ] = [ T ( v 1 ) , T ( v 2 ) ] = [ A v 1 , A v 2 ] = A [ v 1 , v 2 ] = A [ − 3 5 1 2 ] . \large \begin {align*} \begin {bmatrix} 2 & 1 \\ 2 & 3 \end {bmatrix} & = [ T ( \mathbf { v } _ 1 ) , T ( \mathbf { v } _ 2 ) ] \\ & = [ A \mathbf { v } _ 1 , A \mathbf { v } _ 2 ] \\ & = A [ \mathbf { v } _ 1 , \mathbf { v } _ 2 ] \\ & = A \begin {bmatrix} - 3 & 5 \\ 1 & 2 \end {bmatrix} . \end {align*} [ 2 2 1 3 ] = [ T ( v 1 ) , T ( v 2 )] = [ A v 1 , A v 2 ] = A [ v 1 , v 2 ] = A [ − 3 1 5 2 ] .
دترمینان ماتریس آخر برابر با − 11 -11 − 11 وارون این ماتریس برابر است با:
[ − 3 5 1 2 ] − 1 = 1 11 [ − 2 5 1 3 ] . \large \begin {bmatrix} - 3 & 5 \\ 1 & 2 \end {bmatrix} ^ { - 1 } = \frac { 1 } { 1 1 } \begin {bmatrix} - 2 & 5 \\ 1 & 3 \end {bmatrix}. [ − 3 1 5 2 ] − 1 = 11 1 [ − 2 1 5 3 ] .
بنابراین، داریم:
A = [ 2 1 2 3 ] [ − 3 5 1 2 ] − 1 = 1 11 [ 2 1 2 3 ] [ − 2 5 1 3 ] . = 1 11 [ − 3 13 − 1 19 ] . \large \begin {align*} A & = \begin {bmatrix} 2 & 1 \\ 2 & 3 \end {bmatrix} \begin {bmatrix} - 3 & 5 \\ 1 & 2 \end {bmatrix} ^ { - 1 } \\[6pt] & = \frac { 1 } { 1 1 } \begin {bmatrix} 2 & 1 \\ 2 & 3 \end {bmatrix} \begin {bmatrix} - 2 & 5 \\ 1 & 3 \end {bmatrix} . \\[6pt] & = \frac { 1 } { 1 1 } \begin {bmatrix} - 3 & 1 3 \\ - 1 & 1 9 \end {bmatrix}. \end {align*} A = [ 2 2 1 3 ] [ − 3 1 5 2 ] − 1 = 11 1 [ 2 2 1 3 ] [ − 2 1 5 3 ] . = 11 1 [ − 3 − 1 13 19 ] .
در نتیجه، نمایش ماتریسی T T T
A = 1 11 [ − 3 13 − 1 19 ] . \large A = \frac { 1 } { 1 1 } \begin {bmatrix} - 3 & 1 3 \\ - 1 & 1 9 \end {bmatrix} . A = 11 1 [ − 3 − 1 13 19 ] .
مثال 4
فرض کنید T T T R 3 \mathbb{R}^3 R 3 R 3 \mathbb{R}^3 R 3
T ( [ 1 1 1 ] ) = [ 1 0 1 ] , T ( [ 2 3 5 ] ) = [ 0 2 − 1 ] , T ( [ 0 1 2 ] ) = [ 1 0 0 ] . \large \begin {align*} T \left ( \, \begin {bmatrix} 1 \\ 1 \\ 1 \end {bmatrix} \, \right ) = \begin {bmatrix} 1 \\ 0 \\ 1 \end {bmatrix} , \qquad T \left ( \, \begin {bmatrix} 2 \\ 3 \\ 5 \end {bmatrix} \, \right ) = \begin {bmatrix} 0 \\ 2 \\ - 1 \end{bmatrix}, \qquad T \left ( \, \begin {bmatrix} 0 \\ 1 \\ 2 \end {bmatrix} \, \right ) = \begin {bmatrix} 1 \\ 0 \\ 0 \end {bmatrix} . \end {align*} T 1 1 1 = 1 0 1 , T 2 3 5 = 0 2 − 1 , T 0 1 2 = 1 0 0 .
برای هر بردار x = [ x y z ] ∈ R 3 \mathbf { x } =\begin {bmatrix} x \\ y \\ z \end {bmatrix} \in \mathbb{R} ^ 3 x = x y z ∈ R 3 T ( x ) T(\mathbf{x}) T ( x )
حل: یک راه برای حل این مثال، استفاده از نمایش ماتریسی است. فرض کنید A A A T T T R 3 \mathbb{R}^3 R 3
در نتیجه، طبق تعریف داریم: T ( x ) = A x T(\mathbf{x})=A\mathbf{x} T ( x ) = A x A A A
A [ 1 2 0 1 3 1 1 5 2 ] = [ A [ 1 1 1 ] , A [ 2 3 5 ] , A [ 0 1 2 ] ] = [ T [ 1 1 1 ] , T [ 2 3 5 ] , T [ 0 1 2 ] ] = [ 1 0 1 0 2 0 1 − 1 0 ] . \large \begin {align*} A \begin {bmatrix} 1 & 2 & 0 \\ 1 & 3 & 1 \\ 1 & 5 & 2 \end {bmatrix} & = \begin {bmatrix} A \begin {bmatrix} 1 \\ 1 \\ 1 \end {bmatrix} , & A \begin {bmatrix} 2 \\ 3 \\ 5 \end {bmatrix} , & A \begin {bmatrix} 0 \\ 1 \\ 2 \end {bmatrix} \\ \end {bmatrix} \\[6 pt] & = \begin {bmatrix} T \begin {bmatrix} 1 \\ 1 \\ 1 \end {bmatrix} , & T \begin {bmatrix} 2 \\ 3 \\ 5 \end {bmatrix} , & T \begin {bmatrix} 0 \\ 1 \\ 2 \end {bmatrix} \\ \end {bmatrix} = \begin {bmatrix} 1 & 0 & 1 \\ 0 & 2 & 0 \\ 1 & - 1 & 0 \end {bmatrix} . \end {align*} A 1 1 1 2 3 5 0 1 2 = A 1 1 1 , A 2 3 5 , A 0 1 2 = T 1 1 1 , T 2 3 5 , T 0 1 2 = 1 0 1 0 2 − 1 1 0 0 .
در نتیجه، ماتریس A A A
A = [ 1 0 1 0 2 0 1 − 1 0 ] [ 1 2 0 1 3 1 1 5 2 ] − 1 . \large \begin {align*} A = \begin {bmatrix} 1 & 0 & 1 \\ 0 & 2 & 0 \\ 1 & - 1 & 0 \end {bmatrix} \begin {bmatrix} 1 & 2 & 0 \\ 1 & 3 & 1 \\ 1 & 5 & 2 \end {bmatrix} ^ { - 1 } . \end {align*} A = 1 0 1 0 2 − 1 1 0 0 1 1 1 2 3 5 0 1 2 − 1 .
ماتریس معکوس را با استفاده از ماتریس افزوده محاسبه میکنیم:
[ 1 2 0 1 0 0 1 3 1 0 1 0 1 5 2 0 0 1 ] → R 2 − R 1 R 3 − R 1 [ 1 2 0 1 0 0 0 1 1 − 1 1 0 0 3 2 − 1 0 1 ] → R 1 − 2 R 2 R 3 − 3 R 2 [ 1 0 − 2 3 − 2 0 0 1 1 − 1 1 0 0 0 − 1 2 − 3 1 ] → − R 3 [ 1 0 − 2 3 − 2 0 0 1 1 − 1 1 0 0 0 1 − 2 3 − 1 ] → R 1 + 2 R 3 R 2 − R 3 [ 1 0 0 − 1 4 − 2 0 1 0 1 − 2 1 0 0 1 − 2 3 − 1 ] . \large \begin {align*} \left[ \begin {array} {rrr|rrr} 1 & 2 & 0 & 1 &0 & 0 \\ 1 & 3 & 1 & 0 & 1 & 0 \\ 1 & 5 & 2 & 0 & 0 & 1 \\ \end {array} \right] \xrightarrow { \substack {R _ 2 - R _ 1 \\ R _ 3 - R _ 1 } } \left[\begin {array} {rrr|rrr} 1 & 2 & 0 & 1 & 0 & 0 \\ 0 & 1 & 1 & - 1 & 1 & 0 \\ 0 & 3 & 2 & -1 & 0 & 1 \\ \end {array} \right] \\[6 pt] \xrightarrow { \substack { R _ 1 - 2 R _ 2 \\ R _ 3 - 3 R _ 2 } } \left[ \begin {array} {rrr|rrr} 1 & 0 & -2 & 3 &-2 & 0 \\ 0 & 1 & 1 & -1 & 1 & 0 \\ 0 & 0 & -1 & 2 & -3 & 1 \\ \end{array} \right] \xrightarrow { - R _ 3 } \left[ \begin {array} {rrr|rrr} 1 & 0 & - 2 & 3 &-2 & 0 \\ 0 & 1 & 1 & -1 & 1 & 0 \\ 0 & 0 & 1 & -2 & 3 & -1 \\ \end{array} \right] \\[6 pt] \xrightarrow { \substack { R _ 1 + 2R _ 3 \\ R _ 2 - R _ 3 } } \left[ \begin {array} {rrr|rrr} 1 & 0 & 0 & -1 &4 & - 2 \\ 0 & 1 & 0 & 1 & - 2 & 1 \\ 0 & 0 & 1 & - 2 & 3 & -1 \\ \end{array} \right]. \end{align*} 1 1 1 2 3 5 0 1 2 1 0 0 0 1 0 0 0 1 R 2 − R 1 R 3 − R 1 1 0 0 2 1 3 0 1 2 1 − 1 − 1 0 1 0 0 0 1 R 1 − 2 R 2 R 3 − 3 R 2 1 0 0 0 1 0 − 2 1 − 1 3 − 1 2 − 2 1 − 3 0 0 1 − R 3 1 0 0 0 1 0 − 2 1 1 3 − 1 − 2 − 2 1 3 0 0 − 1 R 1 + 2 R 3 R 2 − R 3 1 0 0 0 1 0 0 0 1 − 1 1 − 2 4 − 2 3 − 2 1 − 1 .
در نتیجه، ماتریس معکوس برابر است با:
[ 1 2 0 1 3 1 1 5 2 ] − 1 = [ − 1 4 − 2 1 − 2 1 − 2 3 − 1 ] \large \begin {bmatrix} 1 & 2 & 0 \\ 1 &3 &1 \\ 1 & 5 & 2 \end {bmatrix} ^ { - 1 } = \begin {bmatrix} - 1 & 4 & - 2 \\ 1 & - 2 & 1 \\ - 2 & 3 & - 1 \end {bmatrix} 1 1 1 2 3 5 0 1 2 − 1 = − 1 1 − 2 4 − 2 3 − 2 1 − 1
و ماتریس A A A
A = [ 1 0 1 0 2 0 1 − 1 0 ] [ − 1 4 − 2 1 − 2 1 − 2 3 − 1 ] = [ − 3 7 − 3 2 − 4 2 − 2 6 − 3 ] . \large \begin {align*} A = \begin {bmatrix} 1 & 0 & 1 \\ 0 & 2 & 0 \\ 1 & - 1 & 0 \end {bmatrix} \begin {bmatrix} - 1 & 4 & - 2 \\ 1 & - 2 & 1 \\ - 2 & 3 & - 1 \end {bmatrix} = \begin {bmatrix} - 3 & 7 & - 3 \\ 2 & - 4 & 2 \\ - 2 & 6 & - 3 \end {bmatrix}. \end {align*} A = 1 0 1 0 2 − 1 1 0 0 − 1 1 − 2 4 − 2 3 − 2 1 − 1 = − 3 2 − 2 7 − 4 6 − 3 2 − 3 .
با استفاده از رابطه T ( x ) = A x T(\mathbf{x})=A\mathbf{x} T ( x ) = A x T ( x ) T(\mathbf{x}) T ( x )
T ( x ) = A x = [ − 3 7 − 3 2 − 4 2 − 2 6 − 3 ] [ x y z ] = [ − 3 x + 7 y − 3 z 2 x − 4 y + 2 z − 2 x + 6 y − 3 z ] . \large \begin {align*} T ( \mathbf { x } ) & = A \mathbf { x } \\ & = \begin {bmatrix} - 3 & 7 & - 3 \\ 2 & - 4 & 2 \\ - 2 & 6 & - 3 \end {bmatrix} \begin {bmatrix} x \\ y \\ z \end {bmatrix} \\[6 pt] & = \begin {bmatrix} - 3 x + 7 y - 3 z \\ 2 x - 4 y + 2 z \\ - 2 x + 6 y - 3 z \end {bmatrix} . \end {align*} T ( x ) = A x = − 3 2 − 2 7 − 4 6 − 3 2 − 3 x y z = − 3 x + 7 y − 3 z 2 x − 4 y + 2 z − 2 x + 6 y − 3 z .
روش دوم حل این مثال، یافتن ترکیب خطی و استفاده از خاصیت خطی بودن تبدیل خطی است:
x = c 1 [ 1 1 1 ] + c 2 [ 2 3 5 ] + c 3 [ 0 1 2 ] \large \mathbf{x}=c_1\begin{bmatrix} 1 \\ 1 \\ 1 \end {bmatrix} + c _ 2 \begin {bmatrix} 2 \\ 3 \\ 5 \end {bmatrix} + c _ 3 \begin {bmatrix} 0 \\ 1 \\ 2 \end {bmatrix} x = c 1 1 1 1 + c 2 2 3 5 + c 3 0 1 2
برای به دست آوردن ضرایب c 1 c _ 1 c 1 c 2 c _ 2 c 2 c 3 c _ 3 c 3
[ 1 2 0 x 1 3 1 y 1 5 2 z ] \large \left[ \begin {array} {rrr|r} 1 & 2 & 0 & x \\ 1 &3 & 1 & y \\ 1 & 5 & 2 & z \end {array} \right] 1 1 1 2 3 5 0 1 2 x y z
عملیات کاهش دقیقاً مشابه راهحل اول هستند و داریم:
c 1 = − x + 4 y − 2 z c 2 = x − 2 y + z c 3 = − 2 x + 3 y − z . \large \begin {align*} c _ 1 & = - x + 4 y- 2 z \\ c _ 2 & = x - 2 y + z \\ c _ 3 & = - 2 x + 3 y - z . \end {align*} c 1 c 2 c 3 = − x + 4 y − 2 z = x − 2 y + z = − 2 x + 3 y − z .
بنابراین، با استفاده از خاصیت خطی بودن T T T
T ( x ) = T ( c 1 [ 1 1 1 ] + c 2 [ 2 3 5 ] + c 3 [ 0 1 2 ] ) = c 1 T ( [ 1 1 1 ] ) + c 2 T ( [ 2 3 5 ] ) + c 3 T ( [ 0 1 2 ] ) = ( − x + 4 y − 2 z ) [ 1 0 1 ] + ( x − 2 y + z ) [ 0 2 − 1 ] + ( − 2 x + 3 y − z ) [ 1 0 0 ] = [ − 3 x + 7 y − 3 z 2 x − 4 y + 2 z − 2 x + 6 y − 3 z ] . \large \begin {align*} T ( \mathbf { x } ) & = T \left ( \, c _ 1 \begin {bmatrix} 1 \\ 1 \\ 1 \end {bmatrix} + c _ 2 \begin {bmatrix} 2 \\ 3 \\ 5 \end {bmatrix} + c _ 3 \begin {bmatrix} 0 \\ 1 \\ 2 \end {bmatrix} \, \right ) \\[6 pt] & = c _ 1 T \left ( \, \begin {bmatrix} 1 \\ 1 \\ 1 \end {bmatrix} \, \right ) + c _ 2 T \left ( \, \begin {bmatrix} 2 \\ 3 \\ 5 \end {bmatrix} \, \right ) + c _ 3 T \left ( \, \begin {bmatrix} 0 \\ 1 \\ 2 \end {bmatrix} \, \right ) \\[6 pt] & = ( - x + 4 y - 2 z ) \begin {bmatrix} 1 \\ 0 \\ 1 \end {bmatrix} + ( x - 2 y + z ) \begin {bmatrix} 0 \\ 2 \\ - 1 \end {bmatrix} + ( - 2 x + 3y - z ) \begin {bmatrix} 1 \\ 0 \\ 0 \end{bmatrix}\\[6 pt] &=\begin{bmatrix} -3x+7y-3z \\ 2x-4y+2z \\ -2x+6y-3z \end{bmatrix}. \end{align*} T ( x ) = T c 1 1 1 1 + c 2 2 3 5 + c 3 0 1 2 = c 1 T 1 1 1 + c 2 T 2 3 5 + c 3 T 0 1 2 = ( − x + 4 y − 2 z ) 1 0 1 + ( x − 2 y + z ) 0 2 − 1 + ( − 2 x + 3 y − z ) 1 0 0 = − 3 x + 7 y − 3 z 2 x − 4 y + 2 z − 2 x + 6 y − 3 z .
اگر علاقهمند به یادگیری مباحث مشابه مطلب بالا هستید، آموزشهایی که در ادامه آمدهاند نیز به شما پیشنهاد میشوند:
^^
فیلم های آموزش تبدیل خطی – از صفر تا صد (+ دانلود فیلم آموزش رایگان) فیلم آموزشی تبدیل خطی فیلم آموزشی نمایش ماتریسی تبدیل خطی 

















جدا اگر آقای زندی نبود ما تو نصف درسای دانشگاه مونده بودیم 🙂 سلامت باشن هر جا که هستن. من خیلی از درسام رو با ویدیوهای ایشون یاد گرفتم.
فقط درسهای دانشگاه نیست. توی کارمون هم مونده بودیم. من نگاشت خطی رو تو دانشگاه خونده بودم. الان برای آموزش هوش مصنوعی نیازش داشتم. غیر از تعریف هم چیزش از یادم رفته بود. با این مقاله همش رو دومرتبه یاد گرفتم. ممنون
با سلام؛
از بازخورد شما بسیار سپاسگزاریم و خوشحالیم که مطالعه این مطلب برای شما مفید بوده است.
با تشکر از همراهی شما با مجله فرادرس