



سیستم کنترل حلقه باز – به زبان ساده
همانطور که میدانیم، یک سیستم، مجموعهای از اجزا با مشخصات معین است که برای هدف خاصی گرد هم آمدهاند. سیستم کنترل، مجموعهای از زیرسيستمها است كه برای دست يافتن به رفتار مطلوب یا به مقدار مطلوب رساندن يک كميت (يک متغير) يا به نظم درآوردن خروجی از طريق اعمال تغييراتی در ورودی تشکیل میشود. به بیان دیگر، وظیفه هر سیستم کنترل، تنظیم خروجی و نگه داشتن آن در مقدار مطلوب است (چه ثابت باشد و چه متغیر).


در یک سیستم کنترل مناسب، اگر به هر دلیلی تغییری ایجاد شود، خروجی باید بتواند در حالت مطلوب خود قرار گیرد. همچنین، بدون تغییر در ورودی سیستم، اگر عاملی سبب اغتشاش (Disturbance) در خروجی شود، سیستم باید بتواند به وضعیت قبلی خود برگردد و همان مقدار خروجی مطلوب را تحویل دهد که برای آن تنظیم شده است. در گذشته، سیستمهای کنترل، اساساً دستی (Manual) یا حلقهباز (Open-loop) بودند و در آنها از کمترین کنترل خودکار و فیدبک یا پسخور (Feedback) برای تنظیم فرایندهای متغیر مانند نگه داشتن سطح خروجی مطلوب استفاده میشد. در این آموزش، درباره سیستمهای حلقه باز بحث خواهیم کرد و هدف، فقط بررسی مفهومی این سیستمها بوده و برخی از اصطلاحات کلاسیک که در منابع مختلف وجود دارد، بیان نشده است.
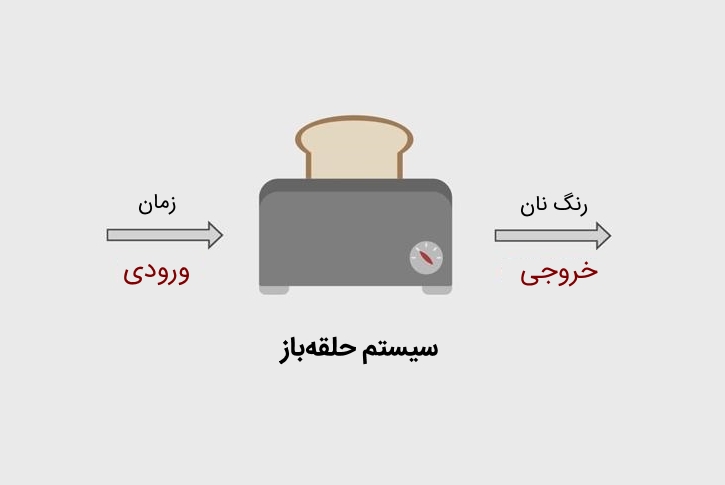
یک لباس خشک کن برقی را در نظر بگیرید. بسته به تعداد لباسها یا میزان مرطوب بودن آنها، کاربر باید یک تایمر (کنترلکننده) را روی 30 دقیقه تنظیم کرده و در پایان این 30 دقیقه، حتی اگر لباسها خیس یا مرطوب باشند، خشک کن بهصورت خودکار از کار باز میایستد و خاموش میشود. در این حالت، عمل کنترلی (Control Action)، ارزیابی میزان رطوبت لباسها و تنظیم دستی فرایند خشک کردن (در اینجا، مدت زمان کار کردن دستگاه) بر اساس آن است.
بنابراین، در این مثال، خشک کن لباس یک سیستم حلقهباز (Open-loop) است، زیرا سیگنال خروجی (میزان رطوبت و یا خشکی لباسها) را پایش یا اندازهگیری نمیکند. در نتیجه، دقت فرایند خشک کردن لباس یا موفقیت در انجام آن، به تجربه کاربر یا شخصی که از دستگاه استفاده میکند بستگی خواهد داشت.
اگر کاربر فکر میکند لباسها بهخوبی خشک نمیشوند، میتواند فرایند خشک کردن سیستم را با افزایش یا کاهش زمان توسط کنترلکننده زمان (تایمر) مجدداً تنظیم کند. برای مثال، زمان کنترلکننده را به 40 دقیقه افزایش دهد. شکل زیر، نمودار بلوکی سیستم کنترل حلقهباز خشک کن لباس را نشان میدهد.

یک سیستم حلقهباز که غیرفیدبک نیز نامیده میشود، نوعی سیستم کنترل است که در آن، خروجی، عمل کنترلی یا سیگنال ورودی را تحت تاثیر قرار نمیدهد. به عبارت دیگر، در یک سیستم کنترل حلقهباز، خروجی، برای مقایسه با ورودی، اندازهگیری نشده یا به عقب خورانده نمیشود (پسخور نمیشود). بنابراین، انتظار میرود یک سیستم حلقهباز، دستور ورودی یا نقطه تنظیم را بهخوبی و بدون توجه به نتیجه نهایی دنبال کند.
در یک سیستم کنترل حلقهباز، هیچ دانشی درباره وضعیت خروجی وجود ندارد، در نتیجه، این سیستم نمیتواند خطاهایی را که در اثر جابهجایی مقادیر از پیش تنظیم شده بهوجود میآید تصحیح کند.
یکی دیگر از معایب سیستم حلقهباز، عدم مدیریت و کنترل اغتشاشها یا تغییرات شرایطی است که ممکن است توانایی کارکرد مطلوب سیستم را کاهش دهد. برای مثال، وقتی درِ خشک کن باز شود و گرما هدر برود، تایمر بهطور پیوسته روی مقداری که تنظیم شده کار خواهد کرد و در زمان مقرر سیستم را خاموش میکند، اما لباسها کاملاً خشک نمیشوند. دلیل این امر آن است که هیچ اطلاعاتی برای ثابت نگه داشتن دما فیدبک نمیشود.

میبینیم که خطاهای سیستم کنترل حلقهباز میتواند تاثیرات نامطلوبی روی فرایند خشک کردن بگذارد، بنابراین لازم است یک کاربر بر آن نظارت کند. مشکل این رویکرد کنترل پیشگیرانه، آن است که کاربر باید دائماً دمای فرایند را بررسی کند و یک عمل کنترلی تصحیحکننده انجام دهد تا لباسها بهصورت مطلوب خشک شوند. این نوع کنترل حلقهباز دستی یا غیرخودکار که قبل از رخ دادن خطا اعمال میشود، «کنترل پیشخور» (Feed forward Control) نامیده میشود.
هدف کنترل پیشخور که گاهی کنترل پیشبین (Predictive control) نیز نامیده میشود، اندازهگیری یا پیشبینی هرگونه اغتشاش حلقهباز بالقوه و جبران آن بهصورت دستی یا غیرخودکار است، قبل از آنکه متغیر کنترلشده نسبت به نقطه تنظیم اصلی تغییر زیادی کند. بنابراین، برای مثال سادهای که گفتیم، اگر درِ خشک کن باز باشد، تشخیص داده شده، بسته میشود و فرایند ادامه مییابد.

با توجه به مطالب و مثالهایی که گفته شد، میتوانیم مشخصات اصلی یک سیستم حلقهباز را بهصورت زیر بنویسیم:
- مقایسهای بین مقادیر واقعی و مطلوب انجام نمیشود.
- عمل خودتنظیم یا کنترلی برای خروجی وجود ندارد.
- هر تنظیم ورودی، یک وضعیت کاری ثابت را برای کنترلکننده تعیین میکند.
- تغییر یا اغتشاشات خارجی، موجب تغییر ورودی کنترل نمیشود (مگر اینکه تنظیمات کنترلکننده بهصورت دستی تغییر داده شود).
هر سیستم حلقهباز را میتوان بهعنوان چند بلوک سری یا یک نمودار بلوکی با ورودی و خروجی نشان داد. نمودار بلوکی یک سیستم حلقهباز، نشان میدهد که مسیر سیگنال از ورودی به خروجی، یک مسیر بدون حلقه فیدبک است و برای هر نوع سیستم کنترل، ورودی با و خروجی با مشخص میشود.
در حالت کلی، لازم نیست برای محاسبه تابع تبدیل، نمودار بلوکی حلقهباز را داشته باشیم. کافی است روابط یا معادلات مناسب هر بلوک را بنویسیم، سپس تابع تبدیل نهایی را بهدست آوریم.

تابع تبدیل هر بلوک، بهصورت زیر است:

تابع تبدیل نهایی، به شکل زیر محاسبه میشود:

در نتیجه، میتوانیم بهره حلقهباز را بهسادگی حساب کنیم:

سیستمهای کنترل حلقهباز، اغلب در فرایندهایی بهکار میروند که به توالی رخدادها برای سیگنالهای «روشن-خاموش» (ON-OFF)، نیاز دارند. برای مثال، در یک لباسشویی، وقتی به آب نیاز است، یکی از بلوکها روشن شده و هنگامی که دیگر به آب نیازی نباشد، خاموش میشود. در بلوک بعدی، اِلِمِنت هیتر برای گرم کردن آب روشن شده و زمانی که به یک دمای مناسب رسید، خاموش خواهد شد. به همین ترتیب، بلوکهای دیگر در سیستم وجود دارند و عمل میکنند.
این نوع کنترل حلقهباز ON-OFF، برای سیستمهایی مناسب است که در آنها تغییر بار بهآرامی رخ میدهد و فرایند بهکندی واکنش نشان میدهد و به تغییرات اندک در عمل کنترل توسط یک کاربر نیاز است.
مثال: کنترل حلقهباز موتور
کنترلکننده یک موتور DC در شکل زیر نشان داده شده است. سرعت چرخش موتور به ولتاژ تغذیه اعمالی بر تقویتکننده (کنترلکننده) بستگی خواهد داشت. مقدار ولتاژ ورودی، با موقعیت پتانسیومتر رابطه تناسبی دارد.

اگر پتانسیومتر را به حد بالای آن حرکت دهیم، حداکثر ولتاژ مثبت به تقویتکننده اعمال میشود و سرعت به حداکثر میرسد. به طریق مشابه، اگر لغزنده پتانسیومتر را به پایینترین نقطه مقاومت حرکت دهیم، ولتاژ اعمالی صفر شده و سرعت بسیار کم میشود یا به صفر میرسد.
موقعیت لغزنده پتانسیومتر، بهعنوان ورودی بوده و بهوسیله تقویتکننده (کنترلکننده) تقویت میشود و موتور DC (فرایند) را در سرعت N که خروجی () است، تنظیم میکند. موتور در یک سرعت ثابت که با موقعیت پتانسیومتر تعیین شده، به چرخش ادامه خواهد داد.
از آنجایی که مسیر سیگنال، از ورودی تا خروجی مستقیم است و حلقهای را تشکیل نمیدهد، بهره کلی سیستم، حاصلضرب تکتک بهرههای پتانسیومتر، تقویتکننده، موتور و بار است. واضح است که حالت مطلوب، متناسب بودن سرعت خروجی با موقعیت پتانسیومتر است. هرچند تغییر بهره پتانسیومتر، تقویتکننده و موتور در طول زمان بهعلت تغییر منبع و دما یا بار موتور، ممکن است اغتشاشهای خارجی سیبستم کنترل حلقهباز موتور را افزایش دهند. اما کاربر در نهایت از تغییر در عملکرد سیستم (تغییر سرعت موتور) آگاه میشود و میتواند با افزایش یا کاهش سیگنال ورودی پتانسیومتر، به سرعت مورد نظر دست پیدا کند.
از مزایای این نوع کنترل حلقهباز موتور، میتوان ارزان و ساده بودن آن را نام برد. همچنین، این نوع کنترل، برای سیستمهایی مناسب است که در آنها رابطه بین ورودی و خروجی مستقیم بوده و تحت تأثیر اغتشاش بیرونی قرار نمیگیرند. البته سیستم حلقهباز ناکافی است زیرا تغییرات و یا اختلالات در سیستم بر سرعت موتور اثر میگذارد.
جمعبندی
دیدیم که یک کنترلکننده میتواند ورودیها را برای بهدست آوردن خروجی مطلوب دستکاری کند. نوعی سیستم کنترل که در آن، خروجی تاثیری بر عمل کنترلی سیگنال ورودی ندارد، سیستم کنترل حلقهباز نامیده میشود. یک سیستم کنترل حلقهباز، بر اساس این واقعیت عمل میکند که سیگنال یا وضعیت خروجی، برای مقایسه با سیگنال ورودی یا نقطه تنظیم سیستم، اندازهگیری یا پسخورانده نمیشود. بنابراین، سیستمهای حلقهباز، معمولاً سیستمهای بدون فیدبک نیز نامیده میشوند.
اگر مطلب بالا برای شما مفید بوده و علاقهمند به موضوعات مرتبط با آن هستید، پیشنهاد میکنیم آموزشهای زیر را نیز ببینید:
- مجموعه آموزشهای دروس مهندسی کنترل
- مجموعه آموزشهای مهندسی کنترل
- آموزش کنترل خطی با رویکرد حل مساله
- آموزش سیستمهای کنترل خطی
- آموزش کنترل مدرن به همراه پیادهسازی در متلب
- نمایش سیستم های دینامیکی با متلب — از صفر تا صد
- فیدبک (Feedback) در سیستم های کنترل — مفاهیم اصلی
^^









بسیار جالب و گویا و جامع و روان بهره باز را توضیح دادید ، سپاس
سلام شهاب عزیز.
خوشحالیم که این مطلب برایتان مفید بوده است.
شاد و پیروز باشید.