


سیستم کنترل حلقه بسته – به زبان ساده
در آموزشهای قبلی مجله فرادرس گفتیم وقتی مقدار خروجی یک سیستم کنترل بر ورودی اثری نگذارد، آن سیستم را حلقهباز مینامیم. همچنین دیدیم که در سیستمهای کنترل حلقهباز، فیدبک وجود ندارد.


اما، هدف هر سیستم کنترل الکتریکی یا الکترونیکی، اندازهگیری، پایش و کنترل یک فرایند است. با پایش خروجی فرایند و فرستادن یا بهعبارتی پسخوراندن آن به ورودی برای مقایسه با خروجی مطلوب، میتوان خطا را کاهش داد و اغتشاشات را حذف کرد. بدین ترتیب، سیستم کنترل عملکرد دقیقی دارد و به پاسخ مطلوب دست خواهیم یافت.
مقدار خروجی که اندازهگیری میشود، «سیگنال فیدبک» (Feedback Signal) نام دارد و سیستمهای کنترلی که از سیگنالهای فیدبک استفاده میکنند، سیستم حلقهبسته نام دارند.
سیستم کنترل حلقهبسته که با نام سیستم کنترل فیدبک نیز شناخته میشود، از مفهوم سیستم حلقهباز برای مسیر روبهجلو بهره میگیرد، البته یک یا چند حلقه یا مسیر فیدبک بین خروجی و ورودی آن نیز وجود دارد. واژه «فیدبک» یا «پسخور» به این معنی است که بخشی از خروجی یا همه آن، به «عقب» یا «پس»، برگردانده شده و به ورودی «خورانده» میشود تا سیستم، عمل کنترلی مناسب را تعیین کند.
هدف سیستمهای حلقهبسته، رسیدن به خروجی مطلوب، آن هم بهصورت خودکار و ماندن در آن شرایط از طریق مقایسه با خروجی واقعی است. این کار، با تولید سیگنال خطا انجام میشود که اختلاف بین خروجی و ورودی مرجع است. به عبارت دیگر، سیستم حلقهبسته، یک سیستم کنترل کاملاً خودکار است که عمل یا تحریک کنترلی آن، بهگونهای وابسته به خروجی است.
برای مثال، سیستم خشککن لباس را در نظر بگیرید که درباره سیستم حلقهباز نیز آن را بررسی کردیم. فرض کنید از یک سنسور یا ترنسدیوسر برای پایش مداوم دما یا خشکی لباسها استفاده میکنیم و سیگنال مربوط به خشکی لباسها را به کنترلکننده برمیگردانیم. شکل زیر، این موضوع را بهخوبی نشان میدهد.

سنسور، خشکی واقعی لباسها را پایش کرده و آن را با ورودی مرجع مقایسه میکند (یا از آن کم میکند). سیگنال خطا (خطا برابر است با اختلاف خشکی مطلوب و خشکی واقعی) با استفاده از کنترلکننده تقویت میشود و خروجی کنترلکننده، تصحیح لازم را برای کاهش خطا به سیستم گرمکننده اعمال میکند. برای مثال، اگر لباسها بسیار مرطوب باشند، کنترلکننده، دما یا زمان خشک کردن را افزایش میدهد. به همین ترتیب، اگر لباسها تقریباً خشک باشند، کنترلکننده، دما را کاهش داده یا فرایند خشک کردن را برای جلوگیری از گرمای بیش از حد یا سوختن لباسها متوقف میکند.
بنابراین، پیکربندی حلقهبسته، با سیگنال فیدبک تشکیل میشود و در مثال خشککن لباس، از طریق سنسور بهدست میآید. اندازه و پلاریته سیگنال خطا، به اختلاف بین خشکی مورد نظر و خشکی موجود (واقعی) لباسها بستگی دارد.
همچنین، از آنجایی که یک سیستم حلقهبسته اطلاعاتی درباره شرایط خروجی به ما میدهد، میتوانیم اغتشاشات سیستم یا تغییر شرایطی را که سبب کاهش توانایی سیستم در رسیدن به هدف مطلوب میشود، بهتر مدیریت کنیم.
برای مثال، همانطور که در آموزش سیستم حلقهباز گفتیم، ممکن است درِ خشککن باز شود و گرما هدر برود. در صورتی که این اتفاق در سیستم حلقهبسته رخ دهد، تغییر دما با سنسور فیدبک تشخیص داده شده و کنترلکننده، خطا را تصحیح میکند تا دما در مقدار قبلی ثابت باقی بماند. همچنین ممکن است سیستم فرایند را متوقف کرده و با هشدار، کاربر را آگاه کند.
همانطور که میبینیم، در یک سیستم کنترل حلقهبسته، سیگنال خطا که اختلاف بین سیگنال ورودی و سیگنال فیدبک (سیگنال خروجی یا تابعی از آن) است، به کنترلکننده وارد میشود و خروجی را به مقدار مطلوب میرساند. واضح است وقتی به خروجی مطلوب رسیده باشیم، خطا صفر است.
عبارت کنترل حلقهبسته، همیشه بر استفاده از فیدبک دلالت میکند و تفاوت سیستمهای کنترل حلقهباز و حلقهبسته همین فیدبک است. دقت خروجی یک سیستم کنترل حلقهبسته، به مسیر فیدبک بستگی دارد و در حالت کلی میتواند بسیار دقیق باشد.
سیستمهای حلقهبسته نسبت به سیستمهای حلقهباز مزایایی دارند. اولین مزیت این است که یک سیستم کنترل فیدبک حلقهبسته توانایی کاهش کاهش حساسیت سیستم نسبت به اغتشاشهای خارجی را دارد. برای مثال، باز شدن در خشککن در سیستم حلقهبسته کنترل مقاومتری خواهد داشت، زیرا هر تغییری در سیستم، فیدبک میشود و کنترلکننده اثر آن را جبران میکند.
مهمترین ویژگیهای کنترل حلقهبسته بهشرح زیر است:
- کاهش خطا با تنظیم خودکار ورودی سیستم تحت کنترل
- بهبود پایداری سیستم ناپایدار
- افزایش یا کاهش حساسیت سیستم
- افزایش قوام در برابر اغتشاشهای خارجی
- عملکرد قابل اطمینان و قابل تکرار
علیرغم اینکه یک سیستم حلقهبسته مناسب مزایای بسیاری نسبت به سیستم کنترل حلقهباز دارد، عیب اصلی آن این است که برای ارائه یک فرایند کنترلی مناسب، باید یک یا چند مسیر فیدبک وجود داشته باشد که خود سبب پیچیدگی سیستم میشود. همچنین اگر بهره کنترلکننده نسبت به تغییرات فرمان یا سیگنال ورودی بسیار حساس باشد، ممکن است سبب ناپایداری سیستم شده و شروع به نوسان کند، زیرا کنترلکننده تلاش میکند خود را بیش از حد اصلاح کند و در نهایت موفق نمیشود. بنابراین، باید موارد و محدودیتهایی را از پیش تعریف کنیم که سیستم براساس آن عمل کند.
برای تنظیم یک سیگنال کنترلی در سیستم کنترل حلقهبسته، باید ابتدا خطای بین خروجی واقعی و خروجی مطلوب را تعیین کنیم. این کار با استفاده از یک «نقطه جمع» (Summing Point) بین حلقه فیدبک و ورودی سیستم میسر است. نقطه جمع، عنصر مقایسه نیز نامیده میشود. نقاط جمع، نقطه تنظیم یک سیستم را با مقدار واقعی آن مقایسه و یک سیگنال خطای مثبت یا منفی تولید میکنند.
نقطه جمع را با یک دایره و دو خط متقاطع داخل آن نشان میدهند. این نقطه ممکن است سیگنالها را با هم جمع کند که آن را با علامت (+) نشان میدهند (فیدبک مثبت) و میتواند آنها را از هم کم کند که با علامت (-) مشخص میشود (فیدبک منفی). مورد اول را جمعکننده و مورد دوم را مقایسهکننده مینامند.

توجه کنید که نقاط جمع ممکن است بیش از دو ورودی داشته باشند، اما تنها یک خروجی دارند که حاصل جمع جبری ورودیها است. همچنین، بردارها جهت سیگنالها را مشخص میکنند. ممکن است برای افزایش تعداد ورودیها، نقاط جمع بهصورت متوالی قرار گیرند.
تابع تبدیل سیستم حلقهبسته
تابع تبدیل هر سیستم کنترل الکترونیکی یا الکتریکی، رابطهای ریاضی بین ورودی و خروجی سیستم است، بنابراین، رفتار سیستم را توصیف میکند. همچنین، نسبت خروجی یک دستگاه خاص به ورودی آن، بهره را نشان میدهد.

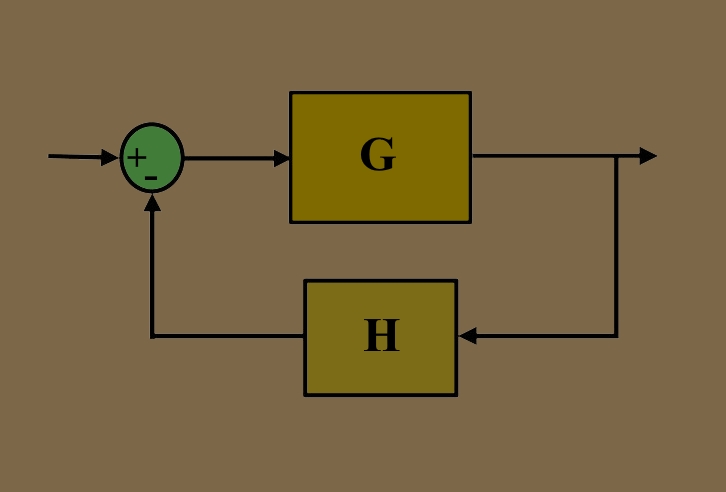
در نتیجه، میتوان گفت خروجی همیشه برابر با حاصلضرب تابع تبدیل در ورودی است. سیستم حلقهبسته زیر را در نظر بگیرید.

در نمودار بلوکی بالا، G بهره حلقهباز کنترلکننده یا سیستم را نشان میدهد و مسیر رو به جلو است. بلوک H نیز نشاندهنده بهره سنسور، ترنسدیوسر یا سیستم اندازهگیری در مسیر فیدبک است.
برای یافتن تابع تبدیل سیستم حلقهبسته بالا، ابتدا باید سیگنال خروجی را برحسب سیگنال ورودی بنویسیم. برای انجام این کار، میتوانیم بهسادگی معادلات نمودار بلوکی را بهصورت زیر بنویسیم:
- خروجی سیستم برابر است با: خطا G = خروجی
لازم به ذکر است که سیگنال خطای ، ورودی بلوک G است.
- خروجی نقطه جمع، برابر است با: خروجی H - ورودی = خطا
- اگر H=1 باشد (فیدبک واحد)، آنگاه خروجی نقطه جمع برابر است با: خروجی - ورودی = خطا ()
اگر خطا را در عبارات بالا حذف کنیم، داریم:
- (خروجی H - ورودی) G = خروجی
- بنابراین، خروجی H G + خروجی = ورودی G
با توجه به روابط بالا، میتوان تابع تبدیل حلقهبسته را بهصورت زیر محاسبه کرد:

در معادله تابع تبدیل بالا برای یک سیستم حلقهبسته، یک علامت جمع (+) در مخرج وجود دارد که فیدبک منفی را نشان میدهد. اگر سیستم، فیدبک مثبت داشته باشد، این علامت منفی خواهد بود و مخرج تابع تبدیل، عبارت است.
میتوان دید وقتی H=1 (فیدبک واحد) و G خیلی بزرگ باشد، تابع تبدیل به یک میل میکند:

همچنین، وقتی بهره حالت ماندگار G سیستم کاهش مییابد، عبارت (G/(1+G کندتر از آن کاهش پیدا میکند. به عبارت دیگر، سیستم نسبت به تغییرات بهره G حساسیت پایینی دارد و این، یکی از مزایای سیستم حلقهبسته است.
سیستم چندحلقهای
در عمل، اغلب مدارهای فیدبک، کنترل چندحلقهای را تشکیل میدهند. سیستم چندحلقهای زیر را در نظر بگیرید.

بلوکهای متوالی مانند و را میتوان به بلوک کاهش داد. همچنین، حلقه داخلی را نیز میتوان ساده کرد.

بعد از مقداری سادهسازی، به نمودار بلوکی زیر میرسیم که شبیه نموداری سیستم کنترل حلقهبسته ساده است.

در نتیجه، تابع تبدیل این سیستم چندحلقهای بهصورت زیر خواهد بود:

کنترل موتور
در این بخش میخواهیم ببینیم چگونه میتوان از سیستمهای حلقهبسته در الکترونیک استفاده کرد. یک موتور DC را در نظر بگیرید که برای سیستمهای حلقهباز آن را بررسی کردیم. اگر یک ترنسدیوسر اندازهگیری سرعت به سیستم متصل کنیم، مثلاً یک تاکومتر یا دُورسنج را روی محور موتور تعبیه کنیم، میتوانیم سرعت را تشخیص داده و سیگنالی متناسب با آن را برای تقویتکننده بفرستیم که در اینجا همان کنترلکننده است.
به این ترتیب میتوان سرعت را در مقدار مشخص N تثبیت کرد. اختلاف بین ولتاژ ورودی تنظیمشده و ولتاژ فیدبک، سیگنال خطا را نشان میدهد.

هر اغتشاش خارجی مانند افزایش بار که به سیستم کنترل حلقهبسته موتور وارد شود، سبب ایجاد اختلاف بین سرعت واقعی موتور و نقطه تنظیم ورودی پتانسیومتر میشود. این اختلاف، سیگنال خطایی را ایجاد میکند که کنترلکننده بهصورت خودکار به آن پاسخ داده و سرعت موتور را تنظیم میکند. بنابراین، میتوان گفت کنترلکننده سعی میکند خطا را کم کند و خطای صفر، بهمعنی برابر بودن سرعت واقعی با نقطه تنظیم است.
مطابق شکل زیر میتوانیم یک مدار ساده را پیاده کنیم که کنترل حلقهبسته موتور را انجام دهد.

نمودار بلوکی سیستم کنترل حلقهبسته نیز بهصورت زیر است.

بهجای تاکومتر یا همان دُورسنج، میتوان از انکودر نوری یا سنسور اثر هال نیز استفاده کرد.
جمعبندی
دیدیم که سیستمهایی با یک یا چند مسیر فیدبک، سیستم حلقهبسته نامیده میشوند. سیستمهای کنترل حلقهبسته را سیستمهای کنترل فیدبک نیز مینامیم و استفاده از آنها در کنترل فرایند و سیستمهای کنترل الکترونیکی بسیار رایج است. سیستمهای فیدبک، بخشی در خروجی دارند که سیگنال خروجی را برای مقایسه با نقطه تنظیم مطلوب، به ورودی انتقال میدهد. فیدبک میتواند مثبت یا منفی باشد.
در یک سیستم حلقهبسته، از کنترلکننده برای مقایسه خروجی واقعی سیستم و مقدار مطلوب آن و تبدیل خطا به یک عمل کنترل مناسب، استفاده میشود. خروجی کنترلکننده بهگونهای است که خطا را کاهش دهد و خروجی سیستم را به مقدار مطلوب برساند. در سیستم کنترل حلقهبسته میتوان از چند حلقه فیدبک استفاده کرد.
سیستمهای کنترل حلقهبسته، برتریهای زیادی نسبت بهسیستمهای کنترل حلقهباز دارند. یکی از این موارد برتری، حساسیت کمتر پاسخ سیستم نسبت به اغتشاشهای خارجی و تغییر پارامترهای سیستم است. البته باید توجه کرد که در صورت طراحی اشتباه سیستم کنترل حلقهبسته، ممکن است سیستم ناپایدار شود.
اگر این مطلب برایتان مفید بوده است، آموزشهای زیر نیز به شما پیشنهاد میشوند:
^^









سلام، تفاوت سیستم کنترل حلقه بسته و سیستم کنترل بازخورددار چیست؟ آیا یکی هستند یا متفاوتند؟
به راحتی نوشتید تابع تبدیل ولی از نحوه محاسبه اش چیزی نگفتید
سلام. برای آشنایی با تابع تبدیل، به آموزش «نمایش فضای حالت و تابع تبدیل — به زبان ساده (+ دانلود فیلم آموزش گام به گام)» مراجعه کنید.
از همراهیتان با مجله فرادرس سپاسگزاریم.