



موتور پله ای چیست؟ – به زبان ساده
در آموزشهای قبلی مجله فرادرس با سرو موتورها آشنا شدیم که در آنها از مدار فیدبک استفاده میشد. در این آموزش با موتورهای پلهای آشنا میشویم که نیازی به مدار فیدبک ندارند. موتور پله ای (Stepper Motor) نوعی از موتورهای بدون جاروبک است که در کاربردهای کنترل سرعت و موقعیت به صورت حلقهباز مورد استفاده قرار میگیرد.



موتور پله ای چیست؟
موتور پلهای یک موتور بدون جاروبک و سنکرون است که حرکت آن به صورت پلهای و گسسته است. در حالت کلی، موتور پلهای در هر پله یا گام به اندازه ۱٫۸ درجه میچرخد و در نتیجه، ۲۰۰ پله را برای چرخش یک دور کامل میپیماید. این نوع موتورها در زاویههای پله ۳۰، ۱۵، ۵، ۲٫۵ و ۲ درجهای نیز موجود هستند.
موتورهای پلهای بر اساس اصول الکترومغناطیس کار میکنند و میتوان آنها را بدون فیدبک کنترل کرد. از آنجایی که موقعیت و سرعت این موتورها با کمک سیستمهای کنترل پیشرفته رایانهای به دقت قابل کنترل است، در بسیاری از کاربردهای مرتبط با کنترل دقیق موقعیت، مانند رباتیک، مورد استفاده قرار میگیرند.
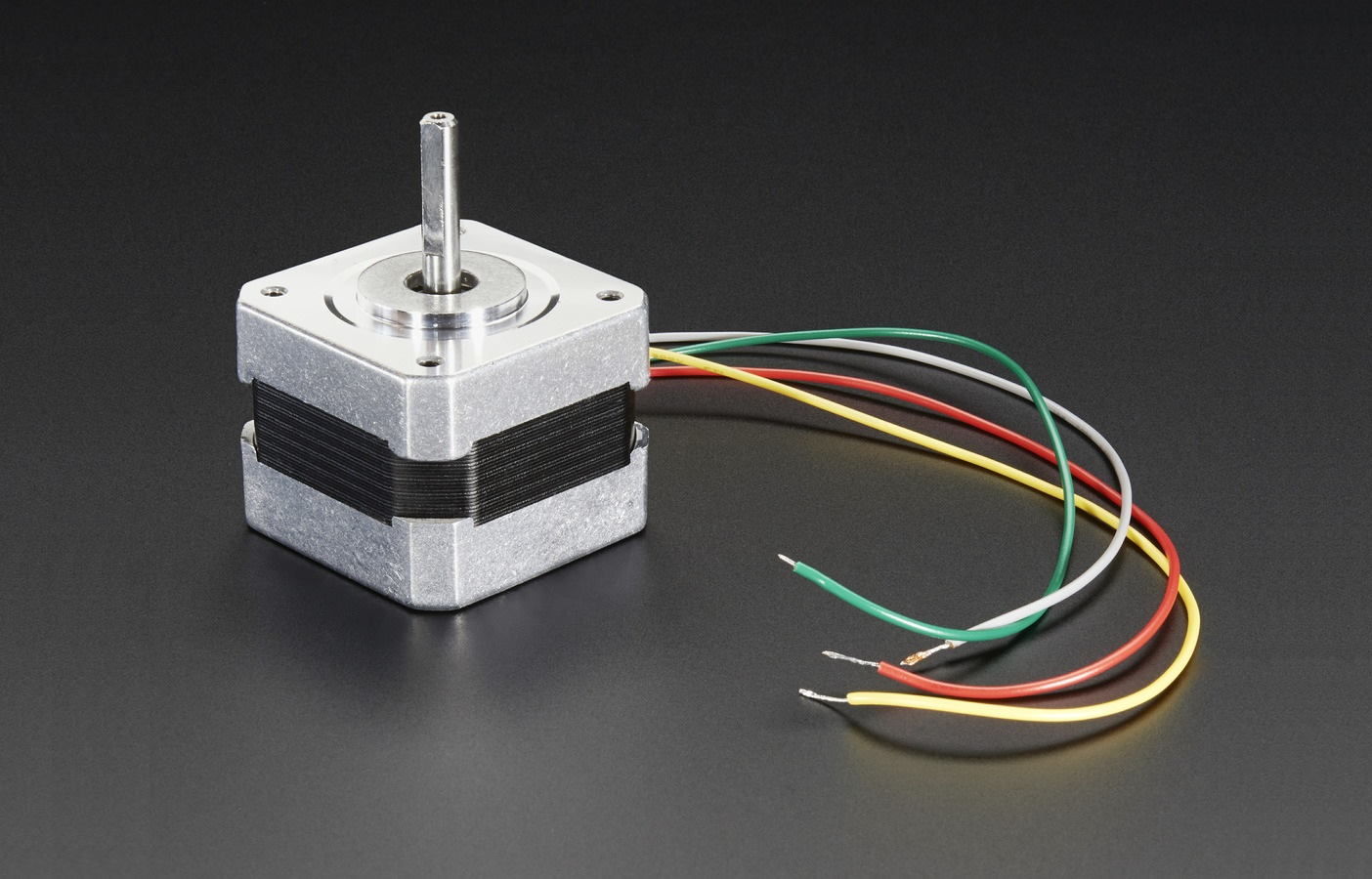
شکل زیر، یک موتور پلهای دوقطبی را نشان میدهد.

اصول عملکرد موتور پله ای
مانند سایر موتورهای الکتریکی، موتور پلهای یک بخش متحرک به نام روتور (Rotor) و یک بخش ثابت به نام استاتور (Stator) دارد. استاتور و روتور قطبهای مغناطیسی دارند و با انرژیدار کردن قطبهای استاتور، روتور برای تراز شدن با استاتور حرکت میکند. روتور یک قطعه آهن دندانهدار به شکل چرخدهنده است. استاتور نیز از مجموعه آهنرباهای الکتریکی تشکیل شده که در حول محور دندانهدار مرکزی قرار گرفتهاند.
شکل زیر ساختار استاتور روتور موتور پلهای را نشان میدهد.

وقتی جریان از سیمپیچیهای فاز موتور پلهای عبور کند، شار مغناطیسی در استاتور و عمود بر جهت گذر جریان به وجود میآید. آهنرباها به طور همزمان انرژیدار میشوند. هنگامی که یک آهنربا با کمک یک مدار درایور خارجی یا میکروکنترلر انرژی میگیرد، شفت یا محور روتور طوری میچرخد که نسبت به استاتور در موقعیتی قرار گیرد که کمترین مقاومت را در برابر شار داشته باشد. این بدین معنی است که الکترومگنت (آهنربای الکتریکی) آن دندانههایی از چرخدنده را جذب میکند که نسبت به بقیه آهنرباها انحراف دارند. به همین دلیل، هنگامی که آهنربای بعدی روشن یا برقدار است، آهنربای قبلی خاموش میشود که منجر به جذب دندانههای چرخدهنده توسط آهنربای دوم خواهد شد. بنابراین، چرخش روتور به صورت پلهای خواهد بود و تعداد پلهها عدد صحیحی است که با توجه به زاویه حرکت در هر مرحله تعیین میشود.

تصویر متحرک زیر، نحوه چرخش روتور را نشان میدهد.
مدهای تحریک یا انرژیدار کردن یک موتور پلهای
با کنترل زاویه هر پله، میتوانیم دقت و نرمی چرخش روتورِ موتور را کنترل کنیم. در موتور پلهای، سه مُد یا حالت تحریک وجود دارد که در شکل زیر نشان داده شدهاند.

عملکرد پله کامل
در این حالت، روتور در یک مرحله به اندازه زاویه پایه 1٫8 درجه حرکت میکند و بدین ترتیب 200 پله برای اتمام چرخش آن لازم است. میتوانیم این حالت را با انرژیدار کردن فقط یک فاز از سیمپیچهای استاتور یا دو فاز عملی کنیم. عملکرد با یک فاز حداقل توان را از مدار درایور مصرف خواهد کرد. از سوی دیگر، وقتی دو فاز را در یک لحظه انرژیدار میکنیم، گشتاور و سرعت زیاد میشود.

عملکرد نصف پله
در این حالت، روتور به اندازه نصف زاویه پایه یک پله کامل میچرخد و در نتیجه گشتاور نسبت به عملکرد پله کامل بهبود مییابد. همچنین، نرمی و دقت حرکت دو برابر میشود.

پله کوچک
در عملکرد پله کوچک، زاویه پایه به مقادیر کوچکتر، حتی ۲۵۶ قسمت، تقسیم میشود. وقتی که افزایش نرمی حرکت مورد نظر باشد، عملکرد گام کوچک یا ریز مورد توجه قرار میگیرد.
انواع موتورهای پلهای
سه نوع موتور پلهای وجود دارد که در این بخش آنها را معرفی میکنیم.
موتور پلهای مغناطیس دائم
زاویه پله معمولی یک موتور پلهای با آهنربای مغناطیس دائم 7٫5 تا 15 درجه است. شفت آهنی روتور با تغییر قطب شمال و جنوب در یک خط مستقیم موازی آهنی مغناطیسی میشود که نتیجه آن افزایش شدت شار مغناطیسی است و به همین دلیل گشتاور این نوع موتورها به طور قابل توجهی افزایش مییابد. موتورهای پلهای آهنربای دائم به دلیل مقادیر بالاتر زاویههای پله، رزولوشن یا دقت و نرمی پایینتری دارند. البته این موتورها، موتورهای کمهزینهای هستند.

شکل زیر، عملکرد موتور پلهای مغناطیس دائم را نشان میدهد.

نرمی چرخش یک موتور پلهای مغناطیس دائم را میتوان با افزایش تعداد قطبها در روتور یا تعداد فازها بهبود داد.
موتور پلهای رلوکتانس متغیر
موتورهای پلهای رلوکتانس متغیر از اولین موتورهای پلهای هستند و استفاده از آنها امروزه متداول نیست. در این نوع موتورها، روتور از روتور چرخدندهای ساخته شده از آهن نرم تشکیل شده است و هنگامی که سیمپیچ استاتور حول روتور با منبع DC تغذیه میشود، دندانههای روتور به سمت قطبهای استاتور مغناطیسی جذب میشوند و بدین ترتیب چرخش صورت میگیرد.

شکل زیر، عملکرد موتور پلهای رلوکتانس متغیر را نشان میدهد.

دندانههای روتور به گونهای طراحی شدهاند که وقتی یکی از آنها در راستای یک فاز باشد، دندانه دیگر با آن همراستا نیست. نرمی این موتور را میتوان با افزایش تعداد دندانهها و افزایش فازها بهبود داد.
موتور پلهای ترکیبی یا هیبرید
این نوع موتور، ترکیبی از موتور پلهای مغناطیس دائم و موتور پلهای رلوکتانس متغیر است. از آنجایی که زاویههای پله معمولی یک موتور پله ترکیبی از 3٫6 درجه تا 0٫9 درجه متغیر است، عملکرد موتور، گشتاور و مشخصههای سرعت این نوع موتورها در مقایسه با موتور پلهای آهنربای دائم بهتر است. روتور این موتورها مانند موتور رلوکتانس متغیر است. آهنربا به صورت محوری مغناطیسی شده و به صورت متحدالمرکز در اطراف آن شار به وجود میآورد.

روتور مغناطیسی دو بخش دارد: یکی برای قطب شمال و دیگری برای قطب جنوب. شکل زیر این دو بخش را نشان میدهد.

روتور موتور پلهای هیبریدی با قاعدهای مشابه انرژیدار شدن سیمپیچی استاتور میچرخد.

انواع سیمپیچی موتورهای پله ای
یک طبقهبندی دیگر موتورهای پلهای بر اساس نوع آرایش سیمپیچ پایه دو فاز آنها است که به دو دسته موتور پلهای تکقطبی (Unipolar Stepper Motor) و موتور پلهای دوقطبی (Bipolar Stepper Motor) تقسیم میشوند.
تفاوت اصلی بین موتورهای پلهای تکقطبی و دوقطبی این است که عملکرد موتور تکقطبی با یک پلاریته است، در حالی که موتور دوقطبی در هر دو ولتاژ مثبت و منفی کار میکند. یک تفاوت دیگر بین موتورهای پلهای تکقطبی و دوقطبی در این است که در موتورهای پلهای تکقطبی، یک سیم جدا برای هر یک از سیمپیچیها مورد نیاز است تا جریان از یک سمت به یک انتهای دیگر سیمپیچ منتقل شود. 
به عبارت دیگر، در موتور پلهای تکقطبی دو سیمپیچی برای هر فاز وجود دارد. دو سیمپیچی هر قطب ممکن است سیمهای مشترکی داشته باشند و از میان آنها انشعاب گرفته شود. موتور تکقطبی عملکرد سادهای دارد، زیرا در آن نیازی به معکوس کردن جریان با یک مدار درایور خارجی نیست. شکل زیر، سیمبندی این نوع موتور را نشان میدهد.

به دلیل وجود سیم اضافه در میانه سیمپیچها، موتور پلهای تکقطبی نصف مقدار شار مغناطیسی خود را برای شارش جریان کاهش یافته تولید میکند. بنابراین، موتور پلهای دوقطبی گشتاور بیشتری نسبت به یک موتور پلهای تکقطبی تولید میکند.

در موتورهای پلهای دوقطبی، یک سیمپیچی برای هر فاز وجود دارد. بنابراین، باید جهت جریان را با یک مدار درایور تغییر داد که کار نسبتاً پیچیدهای است.

کاربردهای موتور پلهای
همانطور که قبلاً نیز اشاره شد، موتورهای پلهای در سیستمهای کنترل موقعیت مورد استفاده قرار میگیرند، زیرا کنترل دقیق موقعیت با کمک موتورهای پلهای کنترل شده با رایانه آسان است. همچنین، موتورهای پلهای به طور گسترده در تجهیزات زیست پزشکی استفاده میشوند که در آنها کنترل دقیق موقعیت لازم است. این موتورها در درایورهای دیسک، چاپگرهای رایانهای و اسکنرها، نورپردازی هوشمند، لنزهای دوربین و سایر وسایل و تجهیزات رایج دیگر نیز کاربرد دارند.
به دلیل ویژگی دقیق بودن موتورهای پلهای، این موتورها در رباتیک نسبت به سایر موتورها ترجیح داده میشوند. موتورهای پلهای در دوربینهای سهبعدی، سیانسیها و برخی دیگر از سیستمهای دوربینها نیز به دلیل قابلیت اطمینان و دقت بالایی که دارند مورد استفاده قرار میگیرند.

مزایا و معایب موتورهای پلهای
در این بخش به برخی از مزایا و معایب موتورهای پلهای اشاره میکنیم.
مزایا
به دلیل حرکت دقیق موتورهای پلهای، کنترل سرعت چرخش آنها بسیار آسان است. به همین دلیل، موتورهای پلهای در کاربردهای رباتیک و اتوماسیون با استقبال فراوانی روبهبرو شدهاند. ساختار ساده و هزینه تعمیر و نگهداری کم از دیگر مزایای این موتورها است. موتورهای پلهای را میتوان به سادگی با هر تغییر محیطی تنظیم کرد و تطبیق داد. این موتور، ماشین بسیار قابل اطمینانی است. ویژگی مهم دیگر موتور پلهای حساسیت بالای آن به راهاندازی، توقف و عملکردهای دیگر است. موتور پلهای مشخصه عملکرد بسیار جذابی نیز دارد. از آنجایی که گشتاور در سرعت پایین در موتورهای پلهای نسبتاً بزرگتر است، در کاربردهایی که گشتاور بالا در سرعت پایین مورد نیاز است استفاده از این موتورها ترجیح داد میشود. عدم وجود جاروبک در موتورهای پلهای یک مزیت محسوب میشود، زیرا طول عمر کلی موتور افزایش پیدا میکند. اگر سیمپیچیهای فاز موتور پلهای انرژیدار شوند، روتور حداکثر گشتاور را در حالت سکون تولید خواهد کرد.
معایب
یکی از معایب اصلی این نوع موتورهای DC این است که به مقدار جریان بیشتری نسبت به یک موتور DC عادی نیاز دارند. هرچند گشتاور تولیدی این موتورها در سرعتهای کم نسبتاً بالاتر است، اما در سرعتهای بالا گشتاور این موتورها کم است و در سرعت بالا عملکرد مناسبی ندارند. علاوه بر این، موتورهای پلهای نسبتاً بازده کمی دارند. عدم وجود ساز و کار فیدبک یکی دیگر از معایب موتورهای پلهای است.
اگر این مطلب برای شما مفید بوده است، آموزشهای زیر نیز به شما پیشنهاد میشوند:
- مدار سه فاز — از صفر تا صد
- منبع تغذیه سوئیچینگ — به زبان ساده
- کنترل موتورهای الکتریکی — به زبان ساده
^^










