



لیدار – به زبان ساده
آیا تاکنون واژه لیدار را شنیدهاید؟ آیا تا به حال به چگونگی حرکت خودروهای بدون راننده یا حالت رانندگی خودکار ماشینهای لوکس فکر کردهاید؟ ماشینهایی که به این تکنولوژی پیشرفته مجهز هستند، توسط سنسورهایی پیشرفته در هر لحظه یک نقشه ۳ بعدی از محیط اطراف خود تهیه کرده و مطابق اطلاعات آن و سیستم GPS حرکت میکنند. این تکنولوژی پیشرفته که به «لیدار» (LIDAR) معروف است، نه تنها در ماشینهای خودران، بلکه در دیگر صنایع نیز کاربرد دارد.



لیدار در کلمه به معنی تشخیص و اندازهگیری (مقیاس بندی) نوری و مخفف عبارت (LIght Detection And Ranging : LIDAR) است. کلمه لیدار از نظر لغوی بسیار شبیه به «رادار» (RAdio Detection And Ranging - RADAR) به معنی ناوبری یا تشخیص و اندازهگیری به وسیله امواج رادیویی و «سونار» (sound navigation ranging) به معنی ناوبری به وسیله امواج صوتی است. در سیستمهای لیدار، تشخیص، فاصلهسنجی، تهیه نقشه و اسکن ۳ بعدی محیط و ... توسط نور یا بهتر بگوییم لیزرها انجام میشود. در ادامه این مقاله در نظر داریم تا با زبانی ساده بیشتر به معرفی لیدار بپردازیم. با ما همراه باشید. همچنین پیشنهاد میکنیم تا نگاهی بر مقاله «رادار (Radar) -- به زبان ساده» داشته باشید تا با اصول سیستمهای راداری آشنا شوید.

لیدار چیست؟
به اطراف خود نگاه کنید. هر آنچه که میبینید، در غالب اطلاعات توسط پرتوهای نوری بازتابیده شده از محیط توسط چشمان شما ثبت و به وسیله ذهن پردازش میشوند. در نتیجه نقشهای ۳ بعدی در هر لحظه مقابل دید شما است.
حال یک ربات را در نظر بگیرید که توسط دوربینهایی به جای چشم، این کار را انجام میدهد. از آنجایی که دوربینها تصاویری دو بعدی از محیط تهیه میکنند، رباتها درک مناسبی از بعد سوم (ارتفاع یا عمق) ندارند. جدا از این مسئله، ممکن است که رباتها فهمی از محیط اطراف، خوب و بد و ... نداشته و به طور مثال، گربهای که به سمتشان میآید را خطر تلقی کنند! البته محتاط بودن رباتها در مسائلی نظیر خودروهای خودران امر مطلوبی است.
با توجه به اهمیت این مبحث لیدار در علوم جغرافیایی، «فرادرس» اقدام به انتشار فیلم آموزش پردازش داده های لیدار با نرم افزارهای ArcGIS, Envi و SAGA در قالب یک آموزش بیش از ۱ ساعته کرده که در ادامه متن به آن اشاره شده است.
- برای دیدن فیلم آموزش پردازش داده های لیدار با نرم افزارهای ArcGIS, Envi و SAGA + اینجا کلیک کنید.
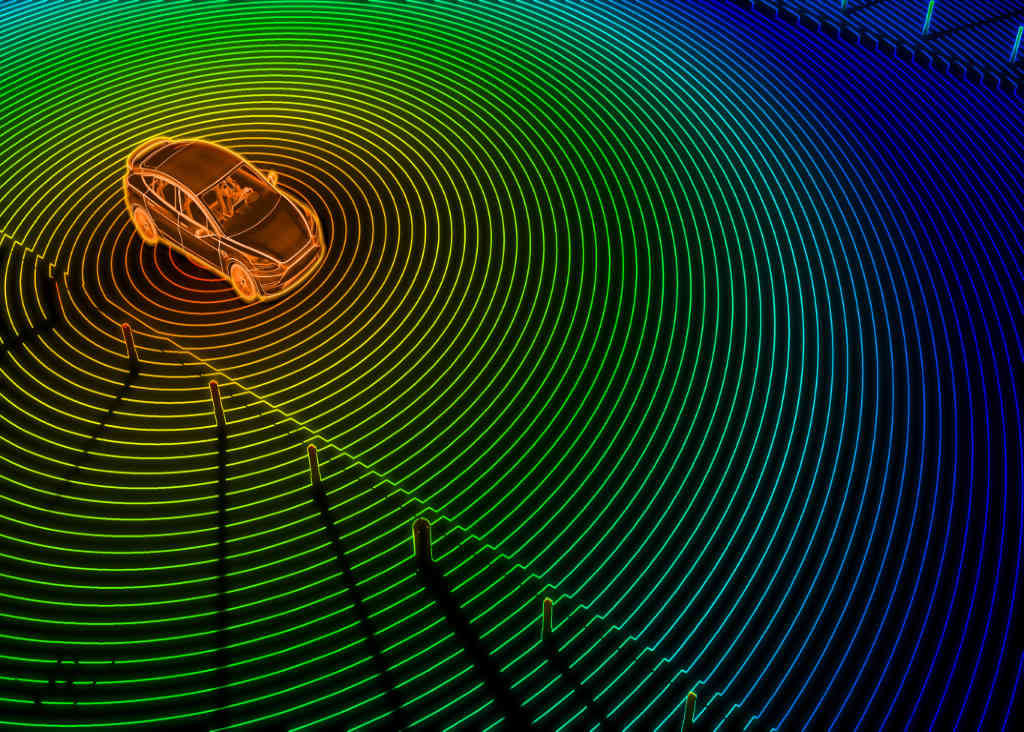
برای رفع مشکلاتی که دوربینهای دو بعدی ایجاد میکنند، رباتهای اتوماتیک یا ماشینهای خودران (بدون راننده) از سیستمهای لیدار استفاده کرده و اطراف خود را بر این مبنا تشخیص میدهند. لیدار با سرعت خیلی زیادی، میتواند تمامی سطوح اطراف خود را اسکن کرده و پستی و بلندیهای جسم را با دقت خیلی خوبی نشان دهد. لیدار این کار را با ارسال پرتوهای لیزری به جسم و ضبط بازتاب و پراشهای پرتو ارسالی انجام میدهد و در نتیجه اطلاعات کاملی در خصوص سطح و عمق و همچنین فاصله جسم تا منبع را از طریق محاسبه زمان رفت و برگشت پرتو نور به دست میآورد. لیدارها به دلیل سرعت خیلی زیادی که دارند، امکان تهیه نقشهای ۳ بعدی را در هر لحظه با دقت خیلی خوبی فراهم میکنند.
در واقع یک خودرو بدون راننده یا رباتهای اتوماتیک که در اطراف خود سنسورهای لیدار دارند، در هر لحظه با تابش پرتوهای نوری (لیزری) به اطراف و ثبت و تحلیل بازتاب و پراشهای آن و همچنین محاسبه زمان رفت و برگشت پرتو به همراه دادههای سیستم GPS، درباره حرکت بعدی خود تصمیمگیری میکنند.

از این حیث، عملکرد لیدار بسیار شبیه به رادار و سونار است. میتوان گفت که رادار همین کار را با استفاده از امواج الکترومغناطیسی رادیویی و سونار با استفاده از امواج مکانیکی صوتی انجام میدهد. سیستمهای سونار بیشتر توسط کشتیها و زیردریاییها استفاده میشوند، چرا که امواج الکترومغناطیسی نور و رادیویی بازدهی مناسبی در فاصلههای خیلی دور در آب ندارند.
به دلیل اینکه در سطح شهر امواج رادیویی و میکروویو به واسطه سیستمهای مخابراتی به وفور وجود دارند، استفاده از سیستمهای رادار در خودروهای خودران باعث افزایش خطا میشود. برای رفع این مشکل، از نور لیزر که نویزپذیری کمتری دارد، استفاده میشود.
فناوری لیدار (LiDAR) روشی پیشرفته برای اندازهگیری فاصله با استفاده از پالسهای لیزری است. این فناوری با تحلیل بازتاب نور، نقشههای دقیق سهبعدی تولید میکند و در مهندسی عمران برای نقشهبرداری، مدلسازی زمین و پایش پروژهها کاربرد دارد. در این باره میتوانید فیلم آموزشی رایگان زیر را ببینید.
شاید امروزه شهرت سیستمهای لیدار مدیون ماشینهای خودران باشد؛ اما یکی دیگر از کاربردهای مهم لیدار تهیه نقشهای دقیق از پستی و بلندهای سطح زمین در یک منطقه جغرافیایی یا تهیه نقشه اتمسفر است. توجه داشته باشید که نور لیزر طیف فرکانسی (طول موجی) زیادی را از مادون قرمز تا فرابنفش پوشش میدهد، و با انتخاب صحیح و مناسب طول موج متناسب با ساختار محیط، میتوانیم بازتاب و پراشهای پرتو ارسالی را دریافت کنیم. به طول مثال با انتخاب فرکانسی در محدود آبی-سبز برای لیزر، میتوان کف دریا را اسکن کرد.

در کاربردهایی نظیر تصویربرداری از سطح یک دشت، دادههای سیستمهای لیدار میتوانند به تنهایی استفاده و تجزیه و تحلیل شوند. اما در خصوص کاربردهای پیشرفتهای نظیر آنچه در سیستمهای خودران ماشینها یا رباتها شاهد هستیم، دادههای جمعآوری شده توسط سیستم لیدار به همراه دادههای دیگر سنسورها مثل، GPS، سرعت و شتابسنج، ژیروسکوپ و ... در هر لحظه توسط پردازنده تجزیه و تحلیل میشوند و مطابق با آن سیستمهای پیشرفته هوش مصنوعی اقدام به تصمیمگیری میکنند.
سیستم لیدار از چه چیزهایی تشکیل شده است؟
برای تهیه یک نقشه ۳ بعدی از محیط اطراف توسط سیستم لیدار، به یک لیزر برای تابش نور و یک گیرنده نوری برای تشخیص نور بازتابیده شده از محیط نیاز است. البته همانطور که اشاره کردیم برای سیستمهای خودران به تجهیزات دیگری که مهمترین آن GPS است، نیاز داریم.
لیزرهای مورد استفاده در سیستمهای لیدار ماشینهای خودران از نوع نیمههادی بوده که در ناحیه طول موجی 900 تا 1100 نانومتر (مادون قرمز نزدیک) کار میکنند. البته طول موجهای دیگری نیز امروزه در سیستمهای لیدار جدید مورد استفاده قرار گرفتهاند. به طور مثال لیزرهای نیمههادی با طول موج 1550 نانومتر مورد استفاده در نسل جدید ماشینهای لوکس امروزی، توانایی اسکن محیط اطراف را تا فاصله 200 متر دارند. این در حالی است که لیزرهای قویتری که در طول موج 900 نانومتر کار میکنند، تنها توانایی تشخیص و اسکن تا فاصله 30 الی 40 متر را دارند.
همانطور که میدانید انرژی یک موج الکترومغناطیسی با افزایش فرکانس (کاهش طول موج) افزایش پیدا میکند. پس جهت اینکه آسیبی متوجه چشمهای عابران سطح شهر نشود، سیستمهای لیدار از لیزرهای با طول موج بالا و توان مناسب استفاده میکنند. البته همانطور که پیشتر اشاره کردیم، سیستمهای لیدار جهت اسکن کف دریاها از لیزر سبز با طول موج حدود 530 نانومتر استفاده میکنند.

گیرندههای نوری سیستم لیدار، سلولهایی فوتوالکتریک، ساخته شده از سیلیکون یا گالیوم آرسناید با حداکثر حساسیت برای یک بازه طول موجی خاص هستند. بسته به کاربرد سیستمهای لیدار، نوع گیرنده نوری میتواند متفاوت باشد. به طور مثال در سیستمهای برد کوتاه از فوتودیودهای ساده سیلیکونی و در سیستمهای دوربرد از فوتودیودهای بهمنی استفاده میشود. حساسیت گیرندههای فوتودیود در سیستمهای لیدار آنقدر زیاد است که میتواند یک فوتون ورودی را به بهمنی از الکترون (جریان یا سیگنال الکتریکی) تبدیل کند.
یکی از مشکلات سیستمهای لیدار، چرخش 360 درجه لیزر برای اسکن محیط اطراف است، جهت رفع این مشکل و همچنین حذف لرزش و ثابت بودن منبع، توسط آینههای کوچکی که به طور 360 درجه میچرخند، نور لیزر را به اطراف میفرستند.

کاربرد لیدار
شاید امروزه سیستم لیدار را به واسطه به کارگیری آنها در ماشینهای خودران و یا رباتهای اتوماتیک بشناسیم. اما متداولترین کاربرد لیدار در نقشهبرداری جغرافیایی و جوی است. سازمانهای بزرگی نظیر NOAA (اداره ملی اقیانوس شناسی و جوی - آمریکا)، USGS (زمین شناسان ایالات متحده) و NASA (سازمان ملی هوانوردی و فضایی آمریکا) دهههاست که از سیستمهای لیدار برای تهیه نقشههای زمین و فضا استفاده میکنند. از این نقشهها برای مطالعه ابرها، ترکیبات جوی، مطالعه گرم شدن زمین و ... استفاده میشود. همچنین فرسایش ساحلی و یا الگو تغییرات جنگلها توسط نقشههای حاصل از سیستم لیدار، قابل تشخیص است.

در مقاله «طیف اتمی — از صفر تا صد» دیدیم که هر اتم، طول موج خاصی را جذب میکند، از این مسئله میتوان برای تشخیص نشت گاز به هنگام تصویر برداری هوایی توسط لیدار از خطوط انتقال استفاده کرد. یکی دیگر از کاربردهای رایج سیستمهای لیدار، تشخیص سرعت ماشینها در بزرگراهها است.

فیلم آموزش پردازش دادههای لیدار با نرم افزارهای ArcGIS ،Envi و SAGA
در صورتی که علاقمند به یادگیری مباحث جزئی و تخصصیتر در خصوص عملکرد لیدار، نوع و نحوه پردازش دادههای جمعآوری شده توسط آن هستید، به دوره آموزش ویدیویی زیر (با مدت زمان یک ساعت و نوزده دقیقه) مراجعه کنید.
- آموزش پردازش دادههای لیدار با نرم افزارهای ArcGIS, Envi و SAGA (لینک آموزش)
درس اول از آموزش فوق به مبانی تکنولوژی لیدار و سنجش از راه دور میپردازد. همچنین در درس دوم تا چهارم از این آموزش با نمایش، پردازش و تحلیل انواع دادههای لیدار در ۳ نرمافزاز مختلف آشنا میشوید. آموزش فوق به تمامی دانشجویان فیزیک کاربردی، مهندسی برق، جغرافیا، عمران، شهرسازی و تمامی رشتههایی که با لیدار و دادههای آن سروکار دارند، پیشنهاد میشود.

- برای دیدن فیلم آموزش پردازش داده های لیدار با نرم افزارهای ArcGIS, Envi و SAGA + اینجا کلیک کنید.
^^









ممنون از مطالب مفیدتون