موتورها و انتخاب درست آنها – بخش سوم (معرفی موتورهای استپر و خطی)
در این پست و در بخش آخر مبحث موتورها، به توضیح در مورد موتورهای استپر (Stepper Motors) و موتورهای خطی (Linear Motors) خواهیم پرداخت. دو مبحث قبلی در این لینک (+) و این لینک (+) آمده است.



موتورهای استپر – دقت بالا

موتورهای استپر، برای کنترل موقعیت، بسیار خوب هستند. موتورها، در چاپگرهای رومیزی، رسامها (Plotters)، چاپگرهای سهبعدی، دستگاههای فرزکاری «CNC» و همه وسایلی که نیاز به کنترل موقعیت دقیق دارند، از این نوع موتورها استفاده میکنند.
گامزنها یا استپرها (Steppers)، بخش ویژهای از موتورهای براشلس هستند. این بخشها، به منظور کنترل گشتاورهای بالا ساخته شدهاند. این گشتاورهای بالا، امکان افزایش گامها در موقعیتهای بعدی را به کاربر میدهند. همه این موارد باعث ایجاد یک سیستم موقعیتیابی ساده میشود که به هیچ انکودری (Encoder) احتیاج ندارد. این امر باعث ساخت آسان و استفاده راحت کنترلرهای موتور استپر میشود.
ساختار یک موتور استپر

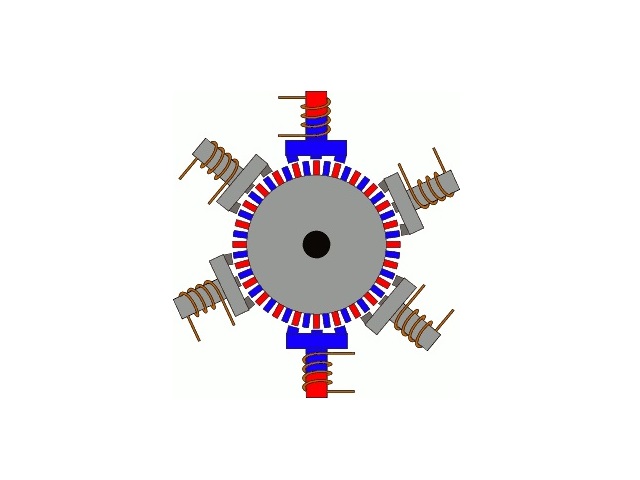
برای درک بهتر نحوه عملکرد یک موتور استپر، اجزای داخلی این نوع موتور را در شکل زیر آوردهایم. همانطور که مشاهده میشود، این موتورها بدون تسمه ساخته شدهاند و شامل چند جزء کلیدی میشوند.

- محور – انرژی مکانیکی موتور را جهت کارکرد مورد نظر انتقال میدهد.
- یاتاقانها – اصطکاک محور را به حداقل میرسانند.
- آهنرباها – میدان مغناطیسی مورد نیاز برای جذب و دفع سیمپیچها را فراهم میکنند.
- قطبها – دقت فواصل گامها را با تمرکز روی میدان مغناطیسی افزایش میدهند.
- سیمپیچها – الکتریسیته را به میدان مغناطیسی مورد نیاز برای حرکت محور تبدیل میکنند.
- اتصالات – انرژی مورد نیاز را از طریق کنترلر به سیمپیچها میرسانند.
مبانی نظری عملکرد موتورهای استپر

موتورهای استپر دقیقاً مانند موتورهای براشلس عمل میکنند، با این تفاوت که اندازه گام در موتورهای استپر، بسیار کوچکتر است. تنها بخش محرک در این نوع موتورها، روتور است. روتور، آهنرباها را در خود جای میدهد. نحوه عملکرد این موتورها زمانی پیچیده میشود که بحث هماهنگی بین توالی دریافت انرژی در سیمپیچها باشد. قطبیت هر یک از سیمپیچها توسط جهت جریان فعلی کنترل میشود. تصویر زیر، الگوی سادهای که کنترلرها دنبال میکنند را نشان میدهد. جریان متناوب، قطبیت هر سیمپیچ را تغییر داده و اثر «جذب و دفع» را در آنها به وجود میآورد. تفاوت قابل توجه این نوع موتورها در چگونگی تفاوت ساختار مغناطیسی یک استپر است. رسیدن به عملکرد مناسب یک سری از آهنرباها در مقیاس کوچک، دشوار است. این کار بسیار هزینهبر نیز هست. برای حل این موضوع، بیشتر استپر موتورها از روش قرار دادن پشتهای صفحات برای هدایت قطبهای آهنربا به درون دندانهها استفاده میکنند.

در یک موتور براشلس، از روش « EMF برگشتی» برای تعیین سرعت استفاده میکنند. یک استپر، جهت «تضمین» به موقع رسیدن به نقطهی موردنظر، روی پرشهای کوتاه هر سیمپیچ اتکا میکند. در حرکت با سرعت بالا، این موضوع میتواند سبب ایست موتور شود (در جایی که روتور قادر به ادامه توالی نیست). راههایی برای حل این مشکل وجود دارد که همه آنها نیاز به درک بالایی از رابطه بین سیمپیچهای موتور و ظرفیت القاء مغناطیسی یا اندوکتانس (inductance) دارند.
مزایای موتورهای استپر
- دقت بالا در موقعیت
- گشتاور نگهدارنده بالا
- قابلیت اعتماد بالا
- تولید بیشتر استپرها در اندازههای استاندارد
معایب موتورهای استپر
- محدودیت بیشترین سرعت در اثر فاصله گام کم
- امکان پرش گامها در ظرفیتهای بالا
- خارج شدن مداوم از حداکثر جریان
موتورهای خطی – آینده موتورها

موتورهای خطی، موتورهای آینده هستند. سرعت، عامل اصلی در دستگاههای مونتاژ «Pick and Place» است. با افزایش سرعت، مسئله اصطکاک و با اصطکاک، مسئله تعمیر و نگهداری و با تعمیر نگهداری، مسئله زمان ازکارافتادگی دستگاه پیش میآید. با از دست رفتن زمان، توان تولید کاهش مییابد. با حذف اجزای چرخشی در یک موتور و جایگزین کردن آنها با اجزای خطی، سیستم کارآمدتر و سبکتر میشود. تعمیر و نگهداری موتورهای خطی سادهتر است و تنها یک بخش حرکتی به شدن قابل اتکا است. برای تولید موتورهای خطی از دستگاه مونتاژ Pick and Place استفاده میشود و این دستگاه بیسار پرسرعت است. برای افرادی که از ضربانساز مصنوعی قلب استفاده میکنند، یک برچسب اخطار بر روی این دستگاه وجود دارد. در این دستگاه، یک ردیف کامل از آهنرباهای قدرتمند ساخته شده با عناصر کمیاب زمین استفاده میشود.

ساختار یک موتور خطی
برای درک بهتر نحوه عملکرد موتورهای خطی، نگاهی به درون یک دستگاه مونتاژ Pick and Place میاندازیم.
- واحد حرکت (Motion Module) – شامل کنترلرها و آهنرباهای الکتریکی میشود.
- آهنرباها (Magnets) – یک میدان مغناطیسی جهت جذب و دفع سیمپیچها فراهم میکند.
- یاتاقان خطی (Linear Bearing) – موتور را همراستای آهنربا قرار میدهد. این بخش، تنها بخش محرک یک موتور خطی است.

مبانی نظری عملکرد موتورهای خطی
ساختار یک موتور خطی تقریباً مشابه با یک موتور براشلس است. اگر یک موتور براشلس را باز کنید و اجزای آن را در یک خط مستقیم قرار دهید، یک موتور خطی خواهید داشت. واحد حرکت، تنها بخش محرک موتور خطی است. قسمت پیچیده کار در این موتورها، هماهنگ کردن توالی دریافت انرژی در سیمپیچها است. قطبیت هر یک از سیمپیچها توسط جهت جریان فعلی کنترل میشود. تصویر زیر، الگوی سادهای که کنترلرها دنبال میکنند را نشان میدهد. جریان متناوب، قطبیت هر سیمپیچ را تغییر داده و اثر «جذب و دفع» را در آنها به وجود میآورد. در یک موتور خطی، معمولاً یک انکودر یا نوعی سیستم موقعیتیابی پیشرفته وجود دارد که محل قرارگیری واحد حرکت را دنبال میکند. برای رسیدن به دقت بالای محل قرارگیری، کنترلرهای این موتور، بسیار پیچیدهتر از هر سیستم معمول دیگر است به منظور حرکت دقیق و روان واحد حرکت، روش ریزپله (MicroStepping) برای «مهار» آهنرباها مورد استفاده قرار میگیرد. برای این منظور، موتورهای خطی به یک کنترلر بسیار تخصصی برای هر یک از موتورها نیاز دارند. با پیشرفت تکنولوژی کنترلرها، باید شاهد کاهش قیمت موتورهای خطی باشیم. شاید روزی بیاید که چاپگرهای سهبعدی، به جای چند ساعت، اشیا را در مدت چند ثانیه چاپ کنند.
مزایای موتورهای خطی
- قابلیت اعتماد بالا
- سرعت بالا
- کارآمدی بالا
- عدم نیاز به تبدیل حرکت چرخشی به حرکت خطی
معایب موتورهای خطی
- گران بودن
- نیاز به کنترلرهای سفارشی
- ساخت سفارشی برای هر سیستم خاص
- باز هم گران بودن!
در این پست به انواع موتور و کاربردهای احتمالی آنها پرداختیم. انتخاب یک موتور، نیازمند تعیین کاربرد مورد نیاز است. با درک صحیح از نیاز خود، میتوانید نقاط قوت و ضعف هر یک از موتورها را بررسی کرده و مناسبترین گزینه را انتخاب کنید. نکتهی مهم دیگر در انتخاب موتور، مقادیر نیروی ورودی و خروجی هر یک از آنها است. شما میتوانید ظرفیت مورد نیاز خود را محاسبه کرده و بر اساس آن موتور مورد نیاز خود را انتخاب کنید.
مطالب مرتبط:
موتورها و انتخاب گزینه مناسب از بین آنها – بخش اول (مبانی الکترومغناطیس)
موتورها و انتخاب گزینه مناسب از بین آنها – بخش دوم (معرفی موتورهای براش و براشلس)