شما در حال مطالعه نسخه آفلاین یکی از مطالب «مجله فرادرس» هستید. لطفاً توجه داشته باشید، ممکن است برخی از قابلیتهای تعاملی مطالب، مانند امکان پاسخ به پرسشهای چهار گزینهای و مشاهده جواب صحیح آنها، نمایش نتیجه آزمونها، پاسخ تشریحی سوالات، پخش فایلهای صوتی و تصویری و غیره، در این نسخه در دسترس نباشند. برای دسترسی به نسخه آنلاین مطلب، استفاده از کلیه امکانات آن و داشتن تجربه کاربری بهتر اینجا کلیک کنید.
«تئوری الاستیسیته خطی» (Linear Elasticity Theory)، نحوه تغییر شکل و ایجاد تنشهای داخلی در اجسام جامد را با توجه به شرایط بارگذاری مشخص و با استفاده از روابط ریاضی مورد مطالعه قرار میدهد. این تئوری پرکابرد در مقاومت مصالح، مواد را به صورت محیطهای پیوسته در نظر میگیرد. در این مقاله، شما را با معادلات حاکم بر محیطهای الاستیک خطی آشنا خواهیم کرد.
الاستیسیته خطی، حالت ساده شده تئوری الاستیسیته غیر خطی و شاخهای از مکانیک محیطهای پیوسته است. مباحثی از قبیل کرنشهای بسیار کوچک یا تغییر شکلهای کوچک و رابطه خطی بین مؤلفههای تنش و کرنش، از فرضیات اصلی این تئوری به حساب میآیند. فرض الاستیسیته خطی، تنها برای تنشهایی معتبر است که باعث ایجاد تسلیم ماده نمیشوند. این فرضیات برای بسیاری از مواد مهندسی و شرایط مختلف طراحی منطقی هستند. از اینرو، تئوری الاستیسیته خطی کاربرد وسیعی در تحلیل سازهها و طراحیهای مهندسی دارد. این تئوری اغلب به همراه تحلیلهای المان محدود به کار میرود.
معادلات حاکم بر محیطهای الاستیک خطی
معادلات حاکم بر مسائل مقدار مرزی در محیطهای الاستیک، بر اساس سه تانسور معادلات دیفرانسیل با مشتقات جزئی برای تعادل گشتاور خطی و شش رابطه کرنش-جابجاییِ بسیار کوچک به دست میآیند. به منظور تکمیل دستگاه معادلات دیفرانسیل، به مجموعهای از روابط مشخصه جبری خطی نیاز است.
در ادامه، به معرفی فرمهای مورد استفاده در معادلات حاکم بر محیطهای الاستیک خطی میپردازیم.
فرم تانسور مستقیم
«فرم تانسور مستقیم» (Direct Tensor Form) به دستگاه مختصات وابسته نیست. معادلات حاکم بر این فرم عبارتاند از:
معادله حرکت
این معادله بیانگر قانون دوم نیوتون است:
∇⋅σ+F=ρu¨
معادلات کرنش-جابجایی
ε=21[∇u+(∇u)T]
معادلات مشخصه
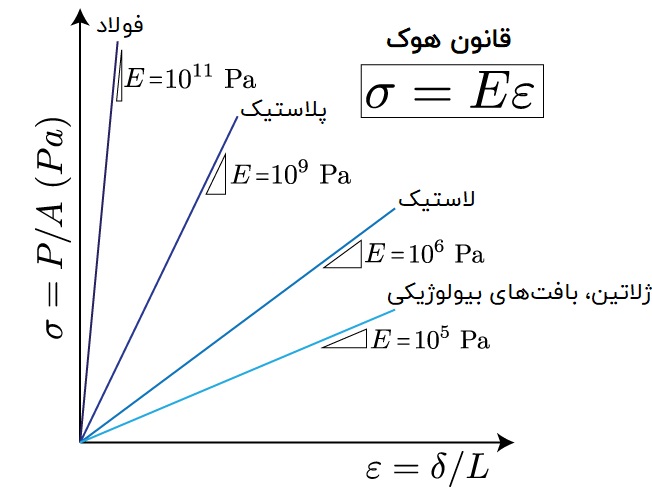
رفتار مواد الاستیک توسط قانون هوک بیان میشود. این قانون، رابطه بین تنشها و کرنشهای مجهول را نشان میدهد. معادله کلی قانون هوک به صورت زیر است:
σ=C:ε
σ: تانسور تنش کوشی؛ ε: تانسور کرنش کوچک؛ u: بردار جابجایی؛ C: تانسور سختی مرتبه چهار؛ F: نیروی حجمی در واحد حجم؛ ρ: چگالی؛ ∇: عملگر نابلا؛ بالانویس T(•): ترانهاده؛ علامت (..) در بالای حروف: مشتق دوم نسبت به زمان؛ A:B=AijBij: ضرب داخلی دو تانسور مرتبه دو
فرم دستگاه مختصات کارتزین
اگر مؤلفههای ارائه شده در فرم قبلی را بر اساس دستگاه مختصات کارتزین بیان کنیم، معادلات حاکم بر محیطهای الاستیک به صورت زیر خواهند بود:
معادله حرکت
σji,j+Fi=ρ∂ttui
اندیس j,(•): مخفف xj∂/(•)∂ است؛ tt∂: بیانگر مشتق مرتبه دوم ∂ نسبت به t است؛ σij=σji: تانسور تنش کوشی؛ Fi: نیروهای حجمی؛ ρ: چگالی؛ ui: جابجایی
در اینجا، 3 معادله مستقل به همراه 6 مجهول (مؤلفه تنش) مستقل خواهیم داشت.
معادله کرنش-جابجایی
σij=Cijklεkl
Cijkl، بیانگر تانسور سختی است. در اینجا، 6 معادله مستقل مرتبط با تنش و کرنش وجود دارد. تقارن تانسورهای تنش و کرنش در این حالت باعث برابر بودن بسیاری از ثابتهای الاستیک و کاهش تعداد المانهای مختلف به 21 المان میشود.
Cijkl=Cklij=Cjikl=Cijlk
مسائل مقدار مرزی الاستواستاتیک برای محیطهای همگن و همسانگرد، یک دستگاه 15 معادلهای با 15 مجهول هستند. این دستگاه 3 معادله تعادل، 6 معادله کرنش-جابجایی و 6 معادله مشخصه را شامل میشود. با مشخص کردن شرایط مرزی، مسئله مقدار مرزی مورد نظر تکمیل خواهد شد. به منظور حل این دستگاه معادلات، میتوان از دو رویکرد «فرمولبندی جابجایی» (Displacement Formulation) و «فرمولبندی تنش» (Displacement Stress) استفاده کرد.
معادلات مشخصه مختصات استوانهای با مختصات کارتزین تقریباً یکسان است؛ با این تفاوت که اندیسهای 1,2,3 در مختصات کارتزین به ترتیب به اندیسهای r,θ,z در مختصات استوانهای تبدیل میشوند.
فرم دستگاه مختصات کروی
معادلات حرکت برای مختصات کروی (r,θ,ϕ) به صورت زیر نوشته میشوند:
مختصات کروی (r,θ,ϕ) به صورت متداول در فیزیک مورد استفاده قرار میگیرد. فاصله شعاعی (r)، زاویه قطبی (θ) و زاویه آزیموت (ϕ) مؤلفههای اصلی این مختصات هستند.
محیطهای همگن و همسانگرد
تانسور سختی در محیطهای همسانگرد، رابطه بین تنشها و کرنشها را نمایش میدهد. در محیطهای همسانگرد، هیچ ترجیحی برای جهت گیری تانسور سختی وجود ندارد؛ چراکه جابجایی حاصل از نیروی اعمال شده در یک جهت خاص با جابجایی حاصل از اعمال همان نیرو در یک جهت دیگر برابر خواهد بود. تانسور سختی در محیطهای همسانگرد به صورت زیر نوشته میشود:
اگر محیط مورد بررسی ناهمگن باشد، در شرایط ثبات محلی یا نا همگنی ضعیف در محیط، استفاده از مدل همسانگرد معقول خواهد بود. در مدلهای هموار و به شدت ناهمگن، باید عامل ناهمسانگردی نیز در نظر گرفته شود. اگر محیط به صورت همگن باشد، مدولهای الاستیک مستقل از محل مورد بررسی خواهند بود. به این ترتیب، معادله مشخصه به صورت زیر نوشته میشود:
σij=Kδijεkk+2μ(εij−31δijεkk)
عبارت بالا، تنش را به یک بخش اسکالر در سمت چپ (مرتبط با فشار اسکالر) و یک بخش بی اثر در سمت راست (مرتبط با نیروهای برشی) تقسیم میکند. این عبارت را میتوان به صورت زیر ساده کرد:
σij=λδijεkk+2μεij
در رابطه بالا، λ، «پارامتر اول لامه» (Lamé's First Parameter) را نشان میدهد. از آنجایی که معادله مشخصه مجموعهای از معادلات خطی است، کرنش را میتوان به صورت تابعی از تنشهای موجود بیان کرد:
εij=9K1δijσkk+2μ1(σij−31δijσkk)
در معادله بالا نیز از یک بخش اسکالر در سمت چپ و یک بخش بی اثر برشی در سمت راست تشکیل میشود.
«الاستواستاتیک» (Elastostatics)، حوزهای برای مطالعه مواد الاستیک خطی در وضعیت تعادل است. در این حالت، جمع تمام نیروهای اعمال شده بر جسم الاستیک صفر خواهد بود. علاوه بر این، جابجاییها تابعی از زمان در نظر گرفته نمیشوند. به این ترتیب، معادلات تعادل به صورت زیر خواهند بود:
σji,j+Fi=0
به عبارت دیگر:
∂x∂σx+∂y∂τyx+∂z∂τzx+Fx=0
∂x∂τxy+∂y∂σy+∂z∂τzy+Fy=0
∂x∂τxz+∂y∂τyz+∂z∂σz+Fz=0
τ: نماد مهندسی تنش برشی
در ادامه، به بررسی انواع معادلات تعادل در محیطهای همگن و همسانگرد میپردازیم.
فرمول بندی جابجایی
در رویکرد فرمول بندی جابجایی، پارامترهای مرتبط با تنش و کرنش حذف می شوند. به این ترتیب، پارمترهای مرتبط با جابجایی به عنوان مجهول در معادلات حاکم باقی می مانند. در مرحله اول، با حذف کرنش، معادلات کرنش-جابجایی درون معادلات مشخصه (قانون هوک) جای گذاری می شوند:
مشتق گیری از رابطه بالا ( با فرض یکنواخت بودن λ و μ)، معادله زیر به دست می آید:
σij,j=λuk,ki+μ(ui,jj+uj,ij)
با جایگزینی معادله بالا در معادله تعادل خواهیم داشت:
λuk,ki+μ(ui,jj+uj,ij)+Fi=0
بر اساس قواعد تبدیل «شوارتز» (Schwarz)، با جایگذاری اندیس «j,j» به جای اندیس های فرضی «k,k» و تعویض «ij» با «ji»، معادله بالا به رابطه زیر تبدیل خواهد شد:
μui,jj+(μ+λ)uj,ji+Fi=0
λ و μ، «پارامترهای لامه» (Lamé parameters) هستند. به این ترتیب، تنها مجهولات موجود در دستگاه معادلات، پارامترهای مرتبط با جابجایی خواهند بود. دلیل نامگذاری این رویکرد نیز همین نکته است. معادلات به دست آمده در این روش با عنوان «معادلات ناویر-کوشی» (Navier-Cauchy Equations) یا «معادلات الاستواستایک» (Elastostatic Equations) شناخته می شوند.
پس از محاسبه میدان جابجایی، می توان مقادیر به دست آمده را درون معادلات کرنش-جابجایی جایگذاری کرد و مقادیر کرنش را به دست آورد. در نهایت، با استفاده از کرنش های به دست آمده در معادلات مشخصه، مقادیر تنش میز تعیین می شوند.
فرمول بندی تنش
در رویکرد فرمول بندی تنش، پارامترهای مرتبط با کرنش و جابجایی حذف می شوند. به این ترتیب، پارمترهای مرتبط با تنش به عنوان مجهول در معادلات حاکم باقی می مانند. پس از تعیین میدان تنش می توان با استفاده از معادلات مشخصه، مقادیر کرنش را نیز محاسبه کرد.
برای ایجاد تانسور کرنش، باید 6 مؤلفه مستقل را تعیین کرد؛ در صورتی که در فرمولبندی جابجایی، تنها به تعیین سه مؤلفه بردار جابجایی نیاز است. این اختلاف نشان میدهد که باید با اعمال محدودیتهایی به تانسور تنش، تعداد درجه آزادی آن را به 3 کاهش داد. با استفاده از معادلات مشخصه میتوان محدودیتهای مورد نظر را مستقیماً از محدودیتهای موجود در تانسور کرنش به دست آورد. تانسور کرنش نیز مانند تانسور تنش، دارای 6 مؤلفه مستقل است. محدودیتهای تانسور کرنش به طور مستقیم و توسط تعریف این تانسور به عنوان تابعی از میدان بردار جابجایی به دست میآیند. این مسئله نشان میدهد که محدودیتهای به دست آمده اطلاعات یا مفاهیم جدیدی را ارائه نمیکنند و به راحتی قابل درک هستند.
یک محیط الاستیک را به صورت مجموعهای از مکعبهای کوچک و بدون کرنش در نظر بگیرید. پس از ایجاد کرنش در این محیط میتوان وضعیت مکعبهای تغییر یافته را توسط یک تانسور دلخواه نمایش داد. این تانسور باید حالتی را نمایش دهد که مکعبها بدون هیچ همپوشانی در کنار یکدیگر قرار گرفته اند. به عبارت دیگر، برای یک کرنش مشخص، باید یک میدان بردار پیوسته (جابجایی) وجود داشته باشد که بتوان با استفاده از آن، تانسور کرنش را به دست آورد.
محدودیتهای تانسور کرنش از طریق روابطی موسوم به «معادلات سازگاری سنت-ونانت» (Saint Venant Compatibility Equations) به دست میآیند که شامل 81 معادله با 6 معادله غیر بدیهی مستقل میشوند. این معادلات، رابطه بین مؤلفههای مختلف کرنش را نشان میدهند:
εij,km+εkm,ij−εik,jm−εjm,ik=0
در مرحله بعد، با استفاده از معادلات مشخصه میتوان کرنشهای موجود در معادله بالا با توجه به تنش بازنویسی کرد و محدودیتهای مرتبط با تانسور تنش را به دست آورد. محدودیتهای تانسور تنش با عنوان «معادلات سازگاری بلترامی- میشل» (Beltrami-Michell Equations of Compatibility) شناخته میشوند:
در شرایط خاصی که نیروی حجمی همگن است، معادله بالا به صورت زیر ساده خواهد شد:
(1+ν)σij,kk+σkk,ij=0
روابط زیر از شروط لازم اما ناکافی برای معادله سازگاری در حالت بالا هستند:
∇4σ=0
σij,kkℓℓ=0
محدودیتهای بالا به همراه معاله تعادل یا معادله حرکت برای حالت الاستودینامیک، امکان محاسبه میدان تانسور تنش را فراهم میکنند. پس از تعیین تانسور تنش میتوان مقادیر کرنش را با استفاده از معادلات مشخصه و مقادیر جابجایی را با استفاده از معادلات کرنش-جابجایی به دست آورد.
یکی از روشهای جایگزین برای فرآیند بالا، تعریف تانسور کرنش بر اساس توابع تنش است. این روش مستقیماً به معادله تعادل میرسد. توابع تنش نیز از یک معادله دیفرانسیل واحد مرتبط با معادلات سازگاری تبعیت میکنند.
الاستودینامیک و معادله موج
«الاستودینامیک» (Elastodynamics)، حوزهای برای مطالعه موجهای الاستیک است که رفتار مواد الاستیک خطی با تغییر زمان را مورد بررسی قرار میدهد. موج الاستیک، نوعی موج مکانیکی است که در مواد الاستیک و ویسکو الاستیک انتشار مییابد. خاصیت الاستیسیته مواد امکان بازیابی نیروی این نوع موج فراهم میکنم. در هنگام رخ دادن امواج الاستیک درون زمین (بر اثر زلزله یا دیگر عوامل مخرب)، به آنها «امواج لرزهای» (Seismic Waves) گفته میشود.
معادله موج الاستودینامیک، همان معادله تعادل الاستواستاتیک به همراه یک عبارت اضافی مرتبط با اینرسی است:
σji,j+Fi=ρu¨i=ρ∂ttui
اگر ماده مورد بررسی به صورت همگن و همسانگرد (دارای تانسور سختی ثابت در تمام نقاط) باشد، معادله موج الاستودینامیک به صورت زیر خواهد بود:
μui,jj+(μ+λ)uj,ij+Fi=ρ∂ttui
یا
μ∇2u+(μ+λ)∇(∇⋅u)+F=ρ∂t2∂2u
معادله را میتوان موج الاستودینامیک به صورت زیر نیز بیان کرد:
در محیطهای همسانگرد، تانسور سختی به صورت زیر است:
Cijkl=Kδijδkl+μ(δikδjl+δilδjk−32δijδkl)
K: مدول حجمی (قابلیت تراکم)؛ μ: مدول برشی (صلبیت)
اگر ماده به صورت همگن (دارای تانسور سختی ثابت در تمام نقاط) باشد، عملگر آکوستیک به شکل زیر تبدیل خواهد شد:
Aij[∇]=α2∂i∂j+β2(∂m∂mδij−∂i∂j)
برای امواج تخت، عملگر دیفرانسیلی بالا به عملگر جبری آکوستیک تبدیل میشود:
Aij[k]=α2kikj+β2(kmkmδij−kikj)
که در آن:
α2=(K+34μ)/ρβ2=μ/ρ
عبارات بالا، مقادیر ویژه [^A[k با بردارهای ویژه ^u را نشان میدهند که عبارت اول با جهت انتشار ^k موازی و عبارت دوم بر این جهت عمود است. به امواج مرتبط با این روابط، امواج الاستیکطولی و برشی گفته میشود. علاوه بر این، به امواج تخت در حوزه لرزه شناسی نیز امواج P و S می گویند.
محیط همگن و ناهمسانگرد
تانسور سختی Cijklبرای محیطهای نا همسانگرد پیچیدگی بیشتری دارد. تقارن تانسور تنش σijبر وجود حداکثر 6 المان متفاوت برای تنش دلالت میکند. به همین ترتیب، تانسور کرنش εijنیز دارای حداکثر 6 المان متفاوت است. از اینرو، تانسور سختی مرتبه چهار Cijkl را میتوان به صورت یک ماتریس Cαβ(یک تانسور مرتبه دو) نوشت.
هنگامی که همسانگردی عرضی ضعیف است (نزدیک به حالت همسانگردی)، استفاده از «پارامترهای تامسون» (Thomsen Parameters) جهت به دست آوردن فرمولهای سرعت موج سادهتر خواهد بود. رابطه این پارامترها برای ماتریس سختی الاستیک به صورت زیر است:
u، واحد طول موج صفحهای است. رابطه بالا، یک معادله موج با فرکانس واردارنده صفر را نشان می دهد اگر و تنها اگر ω2 و ^u، یک جفت بردار ویژه یا مقدار ویژه عملگر جبری آکوستیک را تشکیل دهند:
Akl[k]=ρ1kiCikljkj
«شرط انتشار» (Propagation Condition) یا به عبارت دیگر «معادله کریستوفل» (Christoffel Equation) را میتوان به صورت زیر نوشت:
A[k^]u^=c2u^
که در آن:
k^=k/k⋅k
c=ω/k⋅k
معادله اول، جهت انتشار و معادله دوم، فاز سرعت را نشان میدهد.
«حسین زبرجدی دانا»، کارشناس ارشد مهندسی استخراج معدن است. فعالیتهای علمی او در زمینه تحلیل عددی سازههای مهندسی بوده و در حال حاضر، دبیر بخش مهندسی مجله فرادرس است.
شما در حال مطالعه نسخه آفلاین یکی از مطالب «مجله فرادرس» هستید. لطفاً توجه داشته باشید، ممکن است برخی از قابلیتهای تعاملی مطالب، مانند امکان پاسخ به پرسشهای چهار گزینهای و مشاهده جواب صحیح آنها، نمایش نتیجه آزمونها، پاسخ تشریحی سوالات، پخش فایلهای صوتی و تصویری و غیره، در این نسخه در دسترس نباشند. برای دسترسی به نسخه آنلاین مطلب، استفاده از کلیه امکانات آن و داشتن تجربه کاربری بهتر اینجا کلیک کنید.