



رباتیک چیست؟ – از اهمیت تا کاربرد به زبان ساده
«رباتیک» (Robotics) بخش بین رشتهای علم و مهندسی به حساب میآید که بر طراحی، ساخت و استفاده از رباتهای مکانیکی اختصاص دارد. با مطالعه این راهنما، درک عینی و منسجمی نسبت به پرسش رباتیک چیست بدست خواهد آمد و انواع مختلف روبات، کاربرد رباتیک و نحوه استفاده از آنها در حوزههای تخصصی مختلف شرح داده شده است.
- تعریف ربات و مهمترین عناصر رباتیک را به شکل ساده یاد خواهید گرفت.
- اجزای اصلی انواع ربات را یاد میگیرید و نقش هر بخش را توضیح میدهید.
- دستهبندی رباتها و تفاوت آنها بر اساس سطح خودکارسازی را میآموزید.
- با کاربردهای اصلی رباتیک در صنعت، سلامت، حمل و نقل و منازل آشنا میشوید.
- ضرورت و مزایای یادگیری بازیمحور رباتیک برای کودکان را میآموزید.
- روند تحول تاریخی رباتیک و نقش آن در فناوری کنونی را یاد میگیرید.




بهتر است پیش از آنکه به چیستی رباتیک بپردازیم، ابتدا به این پرسش پاسخ دهیم که ربات چیست و ارتباط آن با رباتیک به چه صورت است.
ربات چیست ؟
ربات ماشینی قابل برنامه نویسی شدن به حساب میآید که میتواند وظیفهای را تکمیل کند. اصطلاح «رباتیک» حوزهای مطالعاتی را توصیف میکند که بر توسعه رباتها و خودکارسازی تمرکز دارد. هر ربات دارای سطح متفاوتی از خودکارسازی است.
گستره این سطوح متفاوت، از رباتهای تحت کنترل انسان با قابلیت انجام وظیفهای مشخص تا باتهای کاملاً خودکاری ادامه پیدا میکند که وظایف را بدون هیچ گونه تاثیر خارجی انجام میدهند.

ریشه شناسی کلمه ربات Robot
اصطلاح «Robot» از کلمه مربوط به کشور چک، یعنی «Robota» مشتق شده است. اصطلاح Robota به معنی «کار اجباری» (Forced Labor) است. این کلمه اولین بار در نمایش تئاتری در سال ۱۹۲۰ به نام «رباتهای جهانی شرکت راسوم» و برای خطاب قرار دادن کاراکترهای نمایش به کار گرفته شد. این کاراکترها کارگران تولید انبوه شدهای بودند که قابلیت تفکر خلاق نداشتند.

رباتیک چیست ؟
رباتیک تلاقی علم، مهندسی و فناوری است و در این حوزه، ماشینهایی به نام ربات یا روبات ساخته میشود که رفتارهای انسانها را تقلید میکنند یا به جای انسانها برخی از اعمال را انجام میدهند. فرهنگ عامه همواره شیفته رباتها بوده است. برای مثال، R2-D2، ترمیناتور و WALL-E، این مضامین انساننمای بیش از حد اغراق شده از رباتها معمولاً مثل کاریکاتوری از واقعیت به حساب میآیند. اما آیا این مضامین از آنچه باور داریم تفکر آیندهنگرانهتری دارند؟ رباتها در حال بدست آوردن قابلیتهای ادراکی و مکانیکی هستند و این باعث میشود احتمال ساخت ماشینی مثل R2-D2 در آینده نزدیک دور از دسترس نباشد.
با پیشرفت فناوری، بازه آنچه رباتیک در نظر گرفته میشود نیز گسترش مییابد. در سال ۲۰۰۵، نود درصد رباتها را تنها میتوانستیم در کارخانجات خودروسازی در حال سر هم کردن ماشینها ببینیم. این نوع رباتها اساساً از بازوهای مکانیکی تشکیل شدهاند که وظیفه آنها، جوشکاری یا پیچ کردن بخشهای خاصی از یک خودرو است.

امروزه تعریفی ارتقایافتهتر و گستردهتر از رباتیک به وجود آمده است که شامل توسعه، ساخت و استفاده از رباتهایی پیشرفتهتر میشود. این رباتها میتوانند وظایفی مانند موارد زیر را انجام دهند.
- کاوش در سختترین شرایط سیاره زمین
- کمک به اجرای قانون
- تسهیل عملهای جراحی
- انجام ماموریتهای نجات
تعریف رباتیک Robotics
با وجود اینکه دنیای رباتیک روز به روز در حال گستردهتر شدن است، در هر حال رباتها برخی خصوصیتها و ویژگیهای مشترک دارند که در ادامه فهرست شدهاند.
- رباتها از نوعی ساختار مکانیکی تشکیل شدهاند. جنبه مکانیکی ربات به آن کمک میکند تا وظایف را در محیطی انجام دهد که برای آن طراحی شده است. برای مثال، چرخهای ربات مریخنورد ناسا نسخه ۲۰۲۰ به صورت مجزا دارای موتور هستند و از لوله تیتانیومی ساخته شدهاند که کمک میکند به زمین سخت و خشن سیاره سرخ، محکم چفت شود.
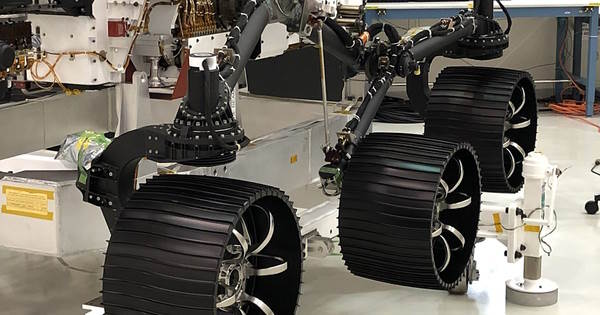
چرخ های ربات مریخ نورد ناسا - رباتها به اجزای الکتریکی نیاز دارند که این اجزا به منظور کنترل و تامین نیروی لازم برای کارکرد تجهیزات ربات به کار گرفته میشوند. اساساً برای تامین نیروی بسیاری از رباتها، جریان برق الکتریکی مثل باتری مورد نیاز است.
- در رباتها معمولاً حداقل میزانی از برنامه نویسی کامپیوتری انجام میشود. بدون وجود کدهایی که برای ربات مشخص کنند چه کاری باید انجام دهد، رباتها هم مثل تمام ماشینهای دیگر تنها قطعه ماشین ساده دیگری میبودند و تفاوتی با دیگر ماشینها نداشتند. نوشتن برنامه کامپیوتری برای ربات، این توانایی را در آن به وجود میآورد که تشخیص دهد در چه زمانی و چگونه کاری را انجام دهد. امروزه از هوش مصنوعی هم به میزان زیادی در رباتها استفاده میشود.

بسیار زودتر از حد انتظار در شرف رسیدن به قابلیتهای شگفتانگیز رباتیک هستیم، چرا که حوزههای هوش مصنوعی و صنعت توسعه نرم افزار به سرعت در حال پیشرفت هستند. در آینده نزدیک به یاری پیشرفتهای حاصل شده در این حوزهها، رباتها همچنان هوشمندتر و انعطافپذیرتر خواهند شد و بهینگی مصرف انرژی نیز در آنها پیشرفتهای زیادی را حاصل خواهد کرد. رباتها همچنان در کارخانههای هوشمند در مرکز توجه قرار خواهند داشت و انجام چالشهای دشوارتری را بر عهده خواهند گرفت و به حفاظت و تضمین زنجیره تامین جهانی کمک خواهند کرد.

صنعت رباتیک سرشار از نوید تحسین برانگیز پیشرفت است، پیشرفتی که فیلمهای علمی تخیلی تنها میتوانستند رویایی از آن را به نمایش بگذارند. در آینده نزدیک از اعماق اقیانوسها تا هزاران کیلومتر در فضا، رباتها را در حال انجام وظایفی خواهیم یافت که انسانها هرگز حتی در رویا هم نمیتوانستند به تنهایی انجام دهند.
رباتیک کودکان چیست ؟
رباتیک کودکان رویکردی سرگرم کننده و تعاملی برای یادگیری اصول STEM (یعنی علم، فناوری، مهندسی و ریاضی) به وسیله ساخت ربات توسط کودکان به حساب میآید. رباتیک حوزهای از فناوری است که در آن برنامه نویسی رباتیک، توسعه و طراحی انجام میشود. در خصوص برنامه نویسی رباتیک به زودی مطلبی در مجله فرادرس منتشر خواهد شد.
رباتیک کودکان از چه سنی مناسب است؟
هیچ راهکار درست یا اشتباهی در خصوص سن شروع به یادگیری رباتیک وجود ندارد. دلیلش این است که هر کودکی سطح یادگیری متفاوتی دارد. در واقع همه چیز بستگی به این دارد که کودک کدام اصول رباتیک را میتواند یاد بگیرد و درک کدام موارد برایش دشوار است.
معمولاً اینگونه است که برخی از کودکان آمادگی درک و یادگیری رباتیک را از ۴ سالگی دارا هستند و برخی دیگر هم تا سن ۸ یا ۹ سالگی و حتی ۱۰ تا ۱۲ سالگی آماده یادگیری مفاهیم این حوزه نیستند.

آموزش رباتیک به کودکان را چطور آغاز کنیم؟
اول از همه و مهمتر از همه اینکه بهترین راه برای یادگیری فناوریهای جدید و کشف مهارتهای IT در کودکان «بازی کردن» به حساب میآید. همچنین این روشی عالی به منظور کسب آمادگی برای فعالیت حرفهای و شغلی موفق در حوزههای STEM (یعنی علم، فناوری، مهندسی و ریاضی) است. حتی دانشآموزانی که پیشینه قدرتمندی در حوزه علوم کامپیوتر یا مهندسی برق ندارند هم میتوانند از طریق بازیهای مخصوص طراحی شده برای این مقصود مفهوم فناوری را در اطراف خود درک کنند.
علاوه بر این، دانشآموزان تواناییهایی را در خود توسعه خواهند داد که در بسیاری از جنبههای زندکی کاربردی و مفید خواهد بود. اینها تنها دلایل اندکی هستند برای اینکه چرا باید در بسیاری از مدارس رباتیک به کدکان در تمام سنین آموزش داده شود. در نهایت، ضروریترین مسئله این است که یادگیری در کودکان باید از طریق بازی اتفاق بیوفتد و نباید فشار نمره و میزان بازدهی روی آنها وجود داشته باشد.
دوره آموزش رباتیک به کودکان چه ویژگیهایی باید داشته باشد؟
ساخت، عملیات، ایجاد، توسعه و به کاربردن کُدها برای به راه انداختن و عمل کرد ربات همگی بخشی از هوش مصنوعی به حساب میآیند که خود حوزهای از STEM است. به بیان ساده، رباتیک ابزاری برای بدست آورد کنترل و مدیریت بر ماشینها به حساب میآید.

دورههای هوش مصنوعی و برنامه نویسی برای کودکان ایده بسیار خوبی برای والدینی محسوب میشوند که میخواهند فرزندان خود را برای آینده آماده کنند.
کودکان چگونه باید وارد حوزه رباتیک شوند؟
برای اینکه کودکان رباتیک یاد بگیرند، ابزارهای متعددی در دسترس هستند که دورههای آموزش آنلاین یکی از این ابزارها به حساب میآید. لازم است از دورههای مخصوص کودکان استفاده شود تا همانطور که پیشتر بیان شد، یادگیری از طریق بازی اتفاق بیوفتد.

همچنین از طریق کلاسهای حضوری، کتاب، اسباببازیهای آموزشی و فعالیتهای بعد از مدرسه هم میتوان آموزش رباتیک کودکان را محقق ساخت. برنامه نویسی بدون شک مهمترین بخش رباتیک به حساب میآید و به همین دلیل پیشنهاد میشود ابتدا کودکان از یادگیری برنامه نویسی با زبانهایی ساده مثل اسکرچ شروع کنند.
رشته رباتیک چیست ؟
رشته رباتیک برآیندی از رشتههای مهندسی مکانیک، مهندسی الکترونیک، مهندسی برق و علوم کامپیوتر به حساب میآید. رشته رباتیک با طراحی، ساخت، عملیات و استفاده از رباتها و همچنین سیستمهای کامپیوتری برای کنترل آنها، بازخورد حسی و پردازش اطلاعات سر و کار دارد.
با توسعه سریع و بازه کاربردهای وسیع، رشته رباتیک برای دانشجویان مشتاق دست پر ظاهر شده است و حرفهای زیادی برای گفتن دارد. از فناوریهای کوانتومی گرفته تا شبکههای ارتباطی با مصرف انرژی بهینه همگی از حوزههایی هستند که در رشته رباتیک برای دانشجویان مطرح میشوند.
برای تحصیل در خارج از کشور چه رشته هایی با محوریت رباتیک وجود دارند؟
رشتههای کارشناسی مرتبط با رشته رباتیک که میتوان برای فعالیت حرفهای و تخصصی در حوزه رباتیک در آنها تحصیل کرد (در خارج از ایران) در ادامه فهرست شدهاند.
- محاسبات (محاسبات بصری و رباتیک) در مقطع فوق لیسانس مهندسی (MEng | Master of Engineering)
- مکاترونیک و رباتیک در مقطع کارشناسی مهندسی (BEng | Bachelor of Engineering)
- رباتیک، مکاترونیک و مهندسی کنترل (به همراه یک سال کارآموزی) در مقطع کارشناسی مهندسی
- مهندسی مکانیک با رباتیک (BEng)
- هوش مصنوعی و رباتیک در مقطع لیسانس (BSc | Bachelor of Sciences)
- رباتیک، سیستمهای خودران و تعاملی (BEng)
گزینههای تحصیلی فوق ممکن است شامل یک سال اضافه برای یادگیری اصول و مبانی و همچنین به صورت فوق لیسانس یکپارچه یا دارای یک سال کارآموزی باشند که در گزینهها مشخص شده است.
برای تحصیل در رشته رباتیک چه نیازمندی هایی وجود دارد؟
برای ورود به رشته رباتیک بهتر است دانش ریاضی، فیزیک و علوم کامپیوتر به حد کافی داشته باشیم. علاقهمندی به این حوزه برای ورود به رشته رباتیک بسیار اهمیت دارد و بهتر است افراد تجربه فعالیت در حوزه رباتیک را داشته باشند و مثلاً قبلاً در این رابطه برنامه نویسی انجام داده باشند یا رباتهای در مقیاس ساده و کوچک را توسعه داده باشند.
همچنین شرکت در مسابقات رباتیک یا مشارکت در یک کلوپ رباتیک هم میتواند قبل از شروع به تحصیل در این رشته مفید باشد. تجربه کاری یا دنبال کردن یک فناوری یا شرکتهای مهندسی فعال در حوزه رباتیک هم نشان از علاقهمندی و اشتیاق فرد برای تحصیل در این رشته دارد.
سرفصل ها و موضوع های رشته رباتیک چیست ؟
واحدهای درسی معمول در رشته رباتیک در ادامه این بخش فهرست شدهاند.
- مکانیک برای رشته مکاترونیک و رباتیک (+)
- ریاضیات مهندسی (+)
- طراحی مدارهای الکتریکی (+)
- سیستمهای هوشمند و رباتیک
- کاربردهای مهندسی سیستم
- کنترل دیجیتال و فضای حالت (+)
- مواد و فرایندهای ساخت
- نقشهکشی فنی و طراحی به کمک کامپیوتر (+)
- سیستمهای اتوماسیون صنعتی (+)
- مدیریت پروژه و کسب و کار (+)
میتوان بیشتر به این موضوع پرداخت، اما وارسی بحث رشته رباتیک طولانیتر از آن است که بتوان در این مطلب به آن پرداخت. امید است به زودی مطلبی جامع به طور اختصاصی با موضوع «رشته رباتیک» در مجله فرادرس منتشر شود. حال در ادامه به این پرسش پرداخته شده است که انواع رباتیک چیست.
انواع رباتیک چیست ؟
رباتها یا همان باتهای مکانیکی دارای اشکال و اندازههای مختلفی هستند تا بتوانند به شیوهای بهینه وظایفی را انجام دهند که برای اجرای آنها طراحی شدهاند. رباتها در طراحی، عملکرد و درجه «خودگردانی» (Autonomy) متفاوت هستند. از ربات ۰٫۲ میلیمتری RoboBee گرفته تا کشتی رباتیک ۲۰۰ متری Vindskip در حال ساخت و توسعه هستند تا وظایفی را بر عهده بگیرند که انسانها به سادگی نمیتوانند انجام دهند.
به طور کلی ۶ نوع ربات متمایز وجود دارد که وظایف را بسته به قابلیتهایشان اجرا میکنند. در ادامه هر یک از انواع رباتها و آنچه انجام میدهند معرفی و شرح داده شده است. ابتدا فهرستی از انواع ربات و رباتیک آمده و سپس هر یک از آنها در زیربخشهایی جداگانه شرح داده شدهاند.
- رباتهای از پیش برنامه ریزی شده
- ربات انسان نما
- رباتهای خودگردان
- ربات کنترل از راه دور
- رباتهای توانبخش
- ربات نرم افزاری (بات | Bot)

ربات های از پیش برنامه ریزی شده
رباتهای از پیش برنامهریزی شده در محیطی تحت کنترل فعالیت میکنند و در این محیطهای خاص، وظایفی ساده و یکنواخت را انجام میدهند. به عنوان مثالی برای ربات از پیش برنامهریزی شده، میتوان بازوهای مکانیکی را در خطوط تولید خودرو نام برد. بازوی مکانیکی تنها یک عملکرد را انجام میدهد. مثلاً این عملکرد میتواند کاری مثل جوش دادن درب اتومبیل، قرار دادن قطعهای خاص در موتور و سایر موارد باشد. وظیفه این ربات اجرای کار محول شده به مدت طولانیتر، سریعتر و بهینهتر نسبت به انسان است.
ربات های انسان نما
«ربات های انسان نما» (Humanoid Robots) رباتهایی هستند که بسیار به انسانها شباهت دارند یا از رفتار انسان تقلید میکنند. این رباتها معمولاً فعالیتهای انسانگونه مثل دویدن، پریدن و حمل اشیاء را انجام میدهد و گاهی برای این منظور طراحی شدهاند که بسیار شبیه به انسانها به نظر برسند و حتی صورت و حالت چهره آنها مثل انسانها باشد.
از جمله ۲ مورد از برجستهترین نمونههای رباتهای انساننما میتوان به سوفیا متعلق به شرکت Hanson Robotics و همچنین ربات «اطلس» (Atlas) تولیدی شرکت «Boston Dynamics» اشاره کرد.

ربات های خودگردان Autonomous
رباتهای خودگردان مستقل از اپراتورهای انسانی عمل میکنند. این رباتها معمولاً به گونهای طراحی شدهاند که بتوانند در محیطهای آزادی که نیازی به نظارت انسان در آنها وجود ندارد، کارها و وظایفی را انجام دهند. این نوع رباتها بسیار منحصربفرد هستند، زیرا از حسگرهایی برای درک دنیای اطرافشان استفاده میکنند و سپس ساختارهای تصمیمگیری را (معمولاً به وسیله کامپیوتر) به کار میبندند تا گام بهینه بعدی را بردارند.
به عنوان مثالی برای ربات خودگردان میتوان به جاروبرقی «رومبا» (Roomba) اشاره کرد که از حسگرهایی برای پرسه زدن در خانه استفاده میکند.

نمونه هایی از ربات های خودگردان
به عنوان مثال از جمله رباتهای خودگردان میتوان به موارد زیر اشاره کرد.
- رباتهای نظافتچی (مثل رومبا که تصویر آن در بالا مشاهده میشود)
- باتهای چمنزنی
- رباتهای تشریفاتی مهماننوازی
- پهبادهای خودران
- باتهای دستیار پزشکی
ربات های کنترل از راه دور
ربات های کنترل از راه دور، رباتهای نیمه خودگردانی هستند که در آنها از شبکه وایرلس به منظور فراهمسازی مدیریت و کنترل انسان از فاصلهای ایمن استفاده میشود. این رباتها معمولاً در شرایط جغرافیایی، آب و هوایی و موقعیتهای بسیار غیر عادی مورد استفاده قرار میگیرند.
به عنوان نمونههایی از رباتهای کنترل از راه دور میتوان به زیردریاییهای تحت کنترل انسان اشاره کرد که برای تعمیر نشتی لولههای زیرآبی در زمان وقوع نشت نفت شرکت BP به کار گرفته میشدند یا میتوان پهبادهای مورد استفاده برای شناسایی مینهای زمینی را در میدان نبرد مثال زد.

توانبخشی رباتیک چیست ؟
«رباتهای توانبخش» (Augmenting Robots) که همچنین به آنها رباتهای VR هم گفته میشود، یا قابلیتهای فعلی انسانها را بهبود میدهند یا توانمندیهایی را تقویت میکنند که ممکن است در برخی از انسانها از دست رفته باشند. حوزه رباتیک برای تقویت انسان، حیطهای به حساب میآید که در آن فیلمهای علمی تخیلی به زودی به واقعیت تبدیل خواهند شد.
در این حوزه رباتهایی در حال ساخت هستند یا ساخته خواهند شد که میتوانند تعریف انسانیت را به وسیله سرعت بخشیدن به انسانها و تقویت قدرت آنها بازتعریف کنند. به عنوان مثالهایی از رباتهای توانبخش میتوان به رباتهای اندام مصنوعی یا استخوانبندیهای بیرونی مورد استفاده برای بلند کردن وزنههای سنگین اشاره کرد.

بات چیست و رباتیک نرم افزاری یعنی چه؟
«رباتهای نرم افزاری» (Software Robotics) که به آنها «بات» (Bot) هم گفته میشود، برنامههای کامپیوتری هستند که وظایفی را به صورت خودکار انجام میدهند. یک کاربرد رایج رباتهای نرم افزاری «چتبات» (Chatbot) نام دارد. چتبات برنامهای کامپیوتری است که هم مکالمات را به صورت آنلاین و هم از طریق تلفن شبیهسازی میکند و اغلب در موارد مربوط به خدمات مشتریان مورد استفاده قرار میگیرد. چتباتها یا میتوانند خدماتی ساده مثل پاسخگویی به سوالات را با پاسخی خودکار ارائه دهند یا دستیارهای دیجیتال پیشرفتهتری باشند که از اطلاعات کاربران میآموزند.
باتهای نرم افزاری تنها در اینترنت حضور دارند و منشاء و مبداء آنها تماماً کامپیوترها هستند. این یعنی باتهای نرم افزاری را نمیتوان ربات در نظر گرفت. برای اینکه بتوان موجودیتی را ربات در نظر گرفت، یک دستگاه حتماً باید دارای شکل و فُرمی فیزیکی مثل بدنه یا شاسی باشد.

انواع بات نرم افزاری چیست؟
در این بخش انواع بات به طور خلاصه فهرست شده است.

- چتباتها: این نوع از باتها مکالماتی ساده را اغلب در قالب خدمات مشتریان انجام میدهند.
- اسپمباتها: این نوع باتها آدرسهای ایمیل را جمعآوری و ایمیلهای اسپم ارسال میکنند.
- باتهای دانلود: این نوع از باتها نرم افزارها و اپلیکیشنها را به صورت خودکار دانلود میکنند.
- باتهای خزنده موتور جستجو: این باتها وبسایتها را اسکن و آنها را در موتورهای جستجو قابل نمایش میکنند.
- باتهای نظارتی: این باتها در خصوص سرعت وبسایتها و وضعیت آنها گزارش ارائه میدهند.
ربات ها چطور کار می کنند ؟
در این بخش برای درک بهتر چیستی رباتیک به شرح چگونگی عملکرد رباتها پرداخته شده است. برای شرح این موضوع، باید نحوه کارکرد رباتها را برای رباتهای مستقل و رباتهای وابسته به صورت جداگانه شرح داد. ابتدا در ادامه به شرح نحوه عملکرد رباتهای مستقل پرداخته شده است.
نحوه عملکرد ربات های مستقل چگونه است؟
رباتهای مستقل توانایی کارکرد کاملاً خودکار و مستقل از کنترل اپراتور انسانی را دارا هستند. برای این نوع از رباتها معمولاً نیاز به برنامه نویسی دقیقتر و پیچیدهتری وجود دارد، اما این روش به رباتها امکان میدهد تا بتوانند در شرایط خطرناک، موارد پیش پا افتاده یا کارهای مربوط به وظایف غیرممکن از خنثیسازی بمب و سفر در ژرفترین نقاط دریا گرفته تا خودکارسازی کارخانهها، جای انسانها را بگیرند.
اثبات شده است که رباتهای مستقل نسبت به سایر انواع رباتها برای جامعه از همه بیشتر مخرب بودهاند، زیرا استفاده از آنها نه تنها منجر به حذف برخی از مشاغل شده است، بلکه آنها فرصتهای جدیدی برای رشد بیشتر را هم فراهم کردهاند.

ربات های وابسته چگونه عمل می کنند ؟
رباتهای وابسته رباتهایی غیر خودکار هستند که برای بهبود و تکمیل اعمال از پیش موجود انسانها با آنها تعامل برقرار میکنند. این نوع نسبتاً جدیدی از فناوری به حساب میآید و به طور پیوسته در حال گسترش و استفاده در کاربردهای جدید است، اما نوعی از رباتهای وابستهای که ساخت آنها تحقق یافته، اعضای مصنوعی پیشرفته است که به وسیله ذهن انسان کنترل میشوند.
نمونه مشهوری از ربات وابسته توسط آزمایشگاه فیزیک کاربردی در سال ۲۰۱۸ برای آقای «جانی متنی» (Johnny Matheny) ساخته شد. دست آقای متنی از بالای آرنج قطع شده است. برای آقای متنی عضو پروتزی ماژولاری ساخته شد تا محققان بتوانند کاربرد آن را در طول دورهای پایدار مورد مطالعه قرار دهند. این عضو پروتزی ماژولار از طریق «الکتروماهیچهنگاری» (Electromyography) یا سیگنالهای ارسالی از عضو قطع شده کنترل میشوند.

در طول زمان، عملکرد آقای متنی در کنترل عضو پروتزی بهتر و بهتر شد و سیگنالهایی که از عضو قطع شده ارسال میشدند کوچکتر شدند و تغییرپذیری آنها کمتر شد. نتیجه این بود که دقت حرکت عضو پروتزی بیشتر شد و متنی در نهایت توانست کارهایی به ظرافت نواختن پیانو را انجام دهد.
اجزای اصلی ربات ها در علم رباتیک چیست ؟
رباتها به گونهای ساخته شدهاند تا بتوانند راهکارهایی را برای انواع نیازمندیها ارائه دهند و بسیاری از مقاصد مختلف را برآورده کنند؛ بنابراین، نیاز به انواع مختلفی از اجزای تخصصی برای کامل کردن این وظایف وجود دارد. اجزای اصلی ربات در حوزه رباتیک شامل موارد زیر میشود.
اگرچه، اجزای متعددی وجود دارند که در ساخت هر رباتی بسیار کلیدی و مهم هستند. مثلاً میتوان به منبع انرژی یا واحد پردازنده مرکزی اشاره کرد. به طور کلی اما باید گفت که اجزای رباتیک در ۵ دسته زیر قرار میگیرند.
- «سیستم کنترل» (Control System): پردازنده مرکزی که در سطح بالا ربات را برای انجام کار محول شده هدایت میکند.
- «حسگرها» (Sensors): بخشی که به وسیله سیگنالهای الکتریکی امکان تعامل ربات با دنیای خارج را فراهم میسازد.
- «اهرمها» (Actuators): بخشهای موتوری هستند که مسئولیت تحرکات رباتها را بر عهده دارند.
- «منبع تغذیه» (Power Supply): همان باتری یا منبعی است که برق مورد نیاز ربات را تامین میکند.
- «کنشگر انتهایی» (End Effectors): این بخش، ویژگیها و قابلیتهای خارجی رباتها به حساب میآید که امکان انجام دادن کارها و وظایف محول شده را فراهم میسازد.
اکنون که آشنایی ابتدایی با هر یک از اجزای رباتها در حوزه رباتیک بدست آمده است، در ادامه هر یک از این ۵ بخش مهم در رباتیک را در زیربخشهایی به طور جداگانه بیشتر شرح میدهیم.
سیستم کنترل در رباتیک چیست ؟
محاسبات شامل تمام اجزایی میشود که واحد پردازنده مرکزی ربات را تشکیل میدهند و اغلب به آن سیستم کنترل میگویند. سیستمهای کنترلی به گونهای برنامهنویسی شدهاند تا برای رباتها مشخص کنند چگونه اجزای به خصوص خود را مورد استفاده قرار دهند.
این ساز و کار به نوعی شبیه به نحوه ارسال سیگنالهایی در بدن انسان توسط مغز برای تکمیل یک وظیفه مشخص است. این وظایف رباتگونه میتوانند از هر چیزی شامل عمل جراحی کم تهاجمی گرفته تا بستهبندی خط مونتاژ را شامل شوند.
حسگر در رباتیک چیست ؟
حسگرها محرکهایی را برای یک ربات در قالب سیگنالهای الکترونیکی فراهم میکنند که این محرکها به وسیله کنترلگر پردازش میشوند و به ربات اجازه میدهند تا با دنیای خارج در تعامل باشند. حسگرهای رایجی که در رباتها میتوان یافت شامل دوربینهای ویدیویی به عنوان چشم، سنسور تغییرات نوری برای واکنش نشان دادن به نور و همچنین میکروفنهایی به عنوان گوش میشوند.
این حسگرها به رباتها امکان میدهند تا وضعیت محیط اطراف خود را ثبت و توصیف کنند و با انجام پردازشهای لازم به منطقیترین جمعبندی بر اساس لحظه کنونی برسند. همچنین حسگرها امکان انتقال دستورات را برای واحد کنترل کننده فراهم میکنند.

اهرم یا Actuator در رباتیک چیست ؟
یک دستگاه را تنها زمانی میتوان به عنوان ربات در نظر گرفت که دارای چارچوب یا بدنهای قابل حرکت باشد. اهرمها اجزایی هستند که مسئولیت این حرکتها را بر عهده دارند. این اجزا از موتورهایی تشکیل شدهاند که سیگنالهایی را از سیستم کنترل دریافت میکنند و پشت سر هم برای اجرای حرکتهای مورد نیاز به منظور تکمیل وظیفه محول شده جابجا میشوند.
اهرمها را میتوان از مواد مختلفی مثل فلز یا مواد کشسانی ساخت و همچنین کنترل این اهرمها را میتوان به وسیله استفاده از هوای فشرده (اهرمهای هوا فشاری | Pneumatic) یا روغن (محرکهای هیدرولیک) انجام داد، اما این اهرمها در قالبها و انواع مختلفی ساخته میشوند تا به بهترین نحو نقش تخصصی خود را برآورده کنند.

منبع تغذیه در رباتیک چیست ؟
همانطور که بدن انسان برای عملکرد صحیح به غذا نیاز دارد، رباتها هم به انرژی نیازمند هستند. رباتهای ثابت، مثل آنهایی که در یک کارخانه یافت میشوند، ممکن است با جریان برق متناوب (AC) از طریق اتصال به پریز برق کار کنند. اما بیشتر رایج است که رباتها از طریق باتری داخلی کار کنند. در اکثر رباتها از باتریهای سربی اسیدی به خاطر کیفیت، ایمنی و ماندگاری بالای آنها استفاده میشود.
این در حالی است که در سایر رباتها از انواع باتریهای فشردهتر، اما گران قیمتتر کادمیومی نقرهای استفاده میکنند. ایمنی، وزن، قابلیت تعویض و چرخه حیات، همگی فاکتورهای مهمی هستند که زمان طراحی منبع انرژی رباتها لازم است در نظر گرفته شوند.
برخی از منابع انرژی برای توسعه رباتیک در آینده همچنین شامل انرژی هوا فشاری از گازهای فشرده، انرژی خورشیدی، نیروی هیدرولیک، ذخیره انرژی چرخ هرزگرد، زباله ارگانیک از طریق هضم بیهوازی و انرژی هستهای میشود.
کنشگر انتهایی End Effector در رباتیک چیست ؟
کنشگرهای انتهایی اجزای فیزیکی و معمولاً بیرونی در رباتها هستند که به آنها امکان میدهند تا اجرای وظایفشان را به سرانجام برسانند. رباتها در کارخانهها اغلب دارای ابزارهای قابل تعویضی مثل اسپریکنندههای رنگ و متهها هستند.
همچنین رباتهای جراحی معمولاً مجهز به چاقوی جراحی هستند. سایر انواع رباتها هم میتوانند پنجههایی به منظور حمل اشیا یا حتی دستهایی برای انجام وظایفی مثل تحویل مرسوله، بستهبندی، خنثیسازی بمب و بسیاری از موارد دیگر داشته باشند.

کاربرد رباتیک و ربات ها چیست ؟
رباتها دارای کاربردها و موارد استفاده گستردهای هستند که آنها را به فناوری ایدهآل آینده تبدیل میکند. به زودی رباتها را تقریباً در همه جا مشاهده خواهیم کرد. رباتها را در بیمارستانها، هتلها و حتی جادهها خواهیم دید.
هر یک از مهمترین کاربردهای رباتیک در ادامه فهرست شدهاند و پس از آن نیز در بخشهایی جداگانه به برخی از آنها بیشتر پرداخته میشود.
- حفاظت: مثل مبارزه با آتشسوزی جنگلها
- تولید: کار در کارخانهها، پیدا کردن و حمل اقلامی در انبارها
- مصاحبت و همراهی: فراهم کردن همنشینی برای اشخاص سالمند
- سلامت و مرقبتهای بهداشتی: دستیاری در عملهای جراحی
- حمل و تقل: تحویل غذا و سایر موارد در آخرین مرحله از زنجیره حمل و نقل
- امور منزل: جاروکشیدن خانه و کوتاهکردن چمنها
- نجات: انجام ماموریتها و عملیات جستجو و نجات پس از وقوع بلایای طبیعی
- عملیات نظامی: شناسایی مینهای زمینی در مناطق جنگی
کاربرد رباتیک در تولید چیست ؟
صنعت تولید به احتمال زیاد قدیمیترین و شناخته شدهترین کاربرد رباتیک به حساب میآید. این رباتها و Co-Botها (یعنی رباتهایی که در کنار انسانها کار میکنند) در تولید مورد استفاده قرار میگیرند تا به طور بهینه محصولاتی مثل خودروها و تجهیزات صنعتی را تست و سر هم بندی کنند. تخمین زده میشود در حال حاضر بیش از ۳ میلیون ربات صنعتی در حال استفاده است.
ربات های لجستیک یا تدارکات
رباتهای حمل و نقل، رسیدگی و کنترل کیفیت در حال تبدیل شدن به یکی از ملزومات ضروری برای اکثر خرده فروشان و شرکتهای تدارکات (لجستیک) هستند. به دلیل اینکه اکنون انتظار داریم بستههای سفارشی در سریعترین زمان ممکن به مقصد برسند، شرکتهای تدارکات رباتها را در انبارها و حتی در جادهها به کار میگیرند تا بتوانند بازدهی زمانی را تا جای ممکن بیشینه کنند.
همین حالا رباتهایی در سراسر دنیا در شرکتهای لجستیک در حال برداشتن اقلام سفارش داده شده از قفسهها، انتقال آنها به بخشهای مختلف انبار و بستهبندی آنها هستند. علاوه بر این، افزایش استفاده از رباتهای تحویل مرسوله به مشتری نهایی که به اصطلاح آنها را رباتهای «Last Mile» مینامند، در آینده باعث خواهد شد که مشتریان مستقیماً با رباتها تعامل داشته باشند.

ربات های خانگی
استفاده از رباتها در منزل دیگر تنها محدود به فیلمهای علمی تخیلی نمیشود، بلکه همین حالا میتوان از رباتهای مختلفی برای اهداف و کارهای مختلف در خانه استفاده کرد.
رباتهای خانگی به انجام کارهای روزانه کمک میکنند، یادآوری برنامه روزانه اعضای خانواده را انجام میدهند و کودکان را در خانه سرگرم میکنند. شناخته شدهترین نمونه از رباتهای خانگی، جارو برقی خودکار «رومبا» (Roomba) است. علاوه بر این، امروزه رباتها بسیار متحول شدهاند و کارهای بسیاری از چمنزنی تا نظافت استخر را انجام میدهند.

ربات های حمل و نقل
آیا چیزی علمی تخیلیتر از وسایل نقلیه خودران وجود دارد؟ اما خودروهای خودران هم دیگر خیالپردازی محسوب نمیشوند. در ترکیبی از رباتیک و علم داده، وسایل نقلیه خودران به سرعت در حال تسخیر دنیا هستند. شرکتهایی مثل تسلا، فورد، Waymo، فولکس واگن و BMW همگی در حال کار روی موج بعدی از فناوریهای مربوط به حمل و نقل هستند.
با استفاده از این فناوریهای جدید، کاربران میتوانند با آرامش به صندلیهای خود تکیه دهند و بدون هیچ دخالتی در کنترل وسیله نقلیه از سفر لذت ببرند. شرکتهای تاکسی اینترنتی مثل اوبر و لیفت نیز در حال توسعه ساز و کارهای لازم برای استفاده از خودروهای خودران هستند که در آنها دیگر نیازی به راننده برای راندن وسیله نقلیه وجود ندارد.

کاربرد رباتیک در حوزه سلامت چیست ؟
رباتها در حوزه سلامت و مراقبتهای پزشکی پیشرفتهای بسیار شگرفی داشتهاند. این معجزههای مکانیکی تقریباً در تمام جنبههای پزشکی کاربرد دارند. جراحی به کمک رباتها و رباتهای فیزیوتراپ (حرکت درمانی) که به انسانها کمک میکنند سریعتر از آسیبدیدگی و مصدومیت خلاص شوند تنها ۲ نمونه از کاربردهای گسترده رباتها در پزشکی به حساب میآیند.
به عنوان نمونه، راجع به برخی از رباتهایی که در حال حاضر در حوزه پزشکی فعالیت میکنند، میتوان به ربات دستیار پزشکی تویوتا اشاره کرد. این ربات به بیماران کمک میکند دوباره توانایی راه رفتن را بدست آورند. مثال دیگر، ربات TUG است که برای حرکت و پیمایش در سراسر بیمارستان ساخته شده است تا همه موارد مورد نیاز را از قبیل دارو و ملافه تمیز تحویل دهد.

رباتها به وسیله شرکتهای دارویی نیز به کار گرفته شدهاند تا در مبارزه علیه کووید ۱۹ مشارکت داشته باشند. این رباتها برای نمونهبرداری با سواب گلو استفاده میشوند و همچنین به وسیله برخی از شرکتها برای تولید PPE و دستگاه تنفس به کار گرفته شدهاند.
تاریخچه رباتیک چیست ؟
انسانها از زمان تمدن باستان به رباتها میاندیشیدند؛ از همان زمانی که اسطورهها و باورهایی پیرامون «ماشینهای متفکر» در جوامع بشر شکل گرفت و ساعت آبی اختراع شد.
علم رباتیک از دوران یونانیان، رومیان و مصریان باستان به شدت متحول شده، اما تاریخچه رباتیک بسیار وسیع است. در ادامه این بخش به برخی از مهمترین رویدادهایی پرداخته میشود که تاریخچه رباتیک را شکل دادهاند.
تاریخچه رباتیک در سده ۱۷۰۰ میلادی
در سال ۱۷۳۷ میلادی (۱۱۱۵ شمسی)، «ژاک دو ووکانسون» (Jacques de Vaucanson) اولین ماشین خودکار به ثبت رسیده را ساخت. این ربات «نوازنده فلوت» (Flute Player) نام دارد و دستگاه مکانیکی است که میتواند ۱۲ آهنگ را پخش کند

تاریخچه رباتیک در دهه ۱۹۲۰ میلادی
در سال۱۹۲۰ کلمه «ربات» برای اولین بار در نمایش تئاتر «کارل چاپک» (Karel Capek) با نام مخفف R.U.R. استفاده شده است. همانطور که پیشتر هم بیان شد، کلمه «ربات» از واژهای مورد استفاده در کشور چک، یعنی «روبوتا» (Robota) مشتق شده و به معنی «کار اجباری» است.
همچنین در سال ۱۹۲۶ میلادی اولین ربات در فیلمهای سینمایی ظاهر شد. این ربات در فیلم «متروپلیس» (Metropolis) ایفای نقش کرد.

تاریخچه رباتیک در دهه ۱۹۳۰ میلادی
در سال ۱۹۳۶، آلن تورینگ «پیرامون اعداد قابل محاسبه» (On Computable Numbers)، یعنی مقالهای را منتشر کرد که در آن مفهوم کامپیوتر نظری یا همان تئوریک به نام «ماشین تورینگ» معرفی شد.
تاریخچه رباتیک در دهه ۱۹۴۰ میلادی
در سال ۱۹۴۸، «سایبرنتیک یا کنترل و ارتباطات در حیوان» به وسیله استاد دانشگاه MIT یعنی «نوبرت وینر» (Norbert Wiener) منتشر شد. در این کتاب پیرامون مفهوم کنترل و ارتباطات در الکترونیک و سیستمهای مکانیکی و بیولوژیکی بحث شده است.
در سال ۱۹۵۹ میلادی، «ویلیام گری والتر» متخصص فیزیولوژی اعصاب و مخترع، «المر و الیس» (Elmer and Elsie) را معرفی کرد. المر و الیس یک جفت ربات شبیه به لاک پشت هستند که با باتری کار میکنند. این رباتها اشیاء را حرکت میدهند، منبع نور را پیدا میکنند و میتوانند راه خود را به محل شارژ مجدد پیدا کنند.

تاریخچه رباتیک در دهه ۱۹۵۰ میلادی
در سال ۱۹۵۰، «ایساک آسیموف» ۳ قانون اساسی رباتیک را منتشر کرد. در همان سال، آلن تورینگ مقاله «ماشینهای محاسباتی و هوشمندی» را منتشر کرد و در آن آنچه را ارائه داد که اکنون با عنوان «آزمون تورینگ» میشناسیم. آزمون تورینگ روشی است برای مشخص کردن اینکه آیا یک ماشین هوشمند هست یا خیر.
تاریخچه رباتیک در دهه ۱۹۶۰ میلادی
در سال ۱۹۶۱ اولین دست رباتیک در تاسیسات شرکت ژنرال موتور شروع به فعالیت کرد. این دست رباتیک قطعات فلزی را بلند میکند و میتواند آنها را روی هم انباشته سازد. این ربات دارای برنامهای بود که تقریباً ۲۰۰ حرکت را میتوانست انجام دهد. این دست رباتیک توسط «جورج دِوُل» (George Devol) و شریکش «جوزف انگلبرگر» (Joseph Engelberger) ساخته شده است.
در سال ۱۹۶۹ «ویکتور شاینمن» (Victor Scheinman) دست رباتیک استنفورد را اختراع کرد، رباتی است که ۶ مفصل دارد و میتواند حرکات دست انسان را تقلید کند. این ربات از اولین رباتهایی به حساب میآید که طراحی آن برای کنترل شدن به وسیله کامپیوتر انجام شده بود.

تاریخچه رباتیک در دهه ۱۹۷۰ میلادی
در سال ۱۹۷۲ گروهی از مهندسان در موسسه تحقیقاتی استنفورد ربات «شِیکی» (Shakey) را ساختند. این ربات اولین رباتی به حساب میآید که در آن از هوش مصنوعی استفاده شده است. ربات شِیکی وظایفی را به وسیله مشاهده محیط اطرافش و تشکیل یک طرح و نقشه انجام میدهد. این ربات از حسگر، مسافتیاب و تجهیزاتی برای حس لامسه استفاده میکند تا بتواند حرکاتش را برنامهریزی کند.
در سال ۱۹۷۸، «هیروشی ماکینو» (Hiroshi Makino) محقق اتوماسیون، دست رباتیک ۴ محورهای را به نام «اسکارا» (SCARA) طراحی میکند. این ربات به عنوان اولین رباتی شناخته میشود که میتواند اشیاء را بردارد و در جای دیگر بگذارد. در رباتیک به این نوع رباتها اصطلاحاً «Pick and Place» میگویند.

تاریخچه رباتیک در دهه ۱۹۸۰ میلادی
در سال ۱۹۸۵ میلادی اولین استفاده مستندسازی شده از عمل جراحی به کمک رباتها صورت گرفت که مربوط به دست یا بازوی رباتیک PUMA 560 میشود.
در سال ۱۹۸۵ «ویلیام ویتاکر» (William Whittaker) دو ربات کنترل از راه دور میسازد که به «نیروگاه هستهای Three Mile Island» فرستاده شدند. این رباتها در زیرزمین آسیب دیده ساختمان راکتور هستهای برای بررسی محل اعزام شدند و اطلاعات لازم و همچنین نمونههای آزمایشی برای تخمین سطح تشعشع را به همراه خود بازگرداندند.

در سال ۱۹۸۹ محققان دانشگاه MIT یعنی «رادنی بروکس» (Rodney Brooks) و «A. M. Flynn» مقالهای منتشر کردند که در آن به جای ساخت رباتهایی بزرگ و گران قیمت در تعداد اندک، راجع به ساخت تعداد زیادی از رباتهای کوچک و ارزان قیمت بحث شده است.
تاریخچه رباتیک در دهه ۱۹۹۰ میلادی
در سال ۱۹۹۰ میلادی گروهی از محققان در دانشگاه MIT شرکت iRobot را بنیانگذاری کردند، همان شرکتی که سازنده جاروبرقی رباتیک رومبا به حساب میآید.
در سال ۱۹۹۲ یکی دیگر از محققان دانشگاه MIT (به نام Marc Raibert)، شرکت رباتیک «بوستون داینامیک» (Boston Dynamics) را بنیانگذاری کرد.
در سال ۱۹۹۷ ربات Sojourner روی مریخ نشست. این مریخنورد مستقل ۲.۳ میلیارد بیت داده را به زمین بازگرداند که در این دادهها بیش از ۱۷ هزار تصویر، ۱۵ آنالیز از سنگها و خاک و همچنین دادههای گستردهای در خصوص وضعیت آب و هوایی مریخ وجود داشت.

در سال ۱۹۹۸، «فربی» (Furby) اسباببازی رباتیکی عرضه شد که به وسیله شرکت تایگر الکترونیکز توسعه داده شده است. در نهایت دهها میلیون نسخه از این ربات به فروش رفته است. فربیها به گونهای برنامهنویسی شدهاند که ابتدا چرند میگویند و بعد در طول زمان زبانهای طبیعی واقعی مختلف را میآموزند.
در سال ۱۹۹۹، ربات «آیبو» (Aibo) یک توله سگ رباتیک قدرت گرفته از هوش مصنوعی در بازار تجاری با استقبال گرمی مواجه میشود. این سگ رباتیک که به وسیله شرکت سونی توسعه داده شده است، به صداها واکنش نشان میدهد و دارای رفتاری از پیش برنامهریزی شده است.
تاریخچه رباتیک در دهه ۲۰۰۰ میلادی
در سال ۲۰۰۰، «سینتیا بریزیل» (Cynthia Breazeal) یک کله رباتیک میسازد. این کله به گونهای طراحی شده است که میتواند احساسات را از خود بروز دهد و همچنین به احساسات دیگران پاسخ میدهد. این ربات که Kismet نام دارد، از ۲۱ موتور، حسگرهای صوتی و الگوریتمهایی برای درک لحن آوایی بهره میبرد.
در سال ۲۰۰۰ شرکت سونی از ربات انساننمای خود به نام «رویا» (Dream) پرده برداشت. ربات انساننمای سرگرمی ۲ پایی که این شرکت توسعه داد، اما هیچ وقت به فروش نرسید. در سال ۲۰۰۱ رباتی به نام PackBot ساخته شرکت iRobot محل مرکز تجارت جهانی را بعد از واقعه ۱۱ سپتامبر جستجو کرد.

در سال ۲۰۰۲ شرکت iRobot جاروبرقی رباتیک رومبا را ساخت. این محصول اولین رباتی به حساب میآید که در بخش تجاری در میان عموم محبوبیت پیدا میکند.
در سال ۲۰۰۳، «میک مانتز» و همبنیانگذاران شرکت آمازون رباتیکز (با نام قبلی Kiva Systems) ربات «کیوا» (Kiva) را اختراع کردند. این ربات داخل انبارها مانور میدهد و کالاها را جابجا میکند.
سال ۲۰۰۴ شرکت بوستون داینامیک از رباتی به نام BigDog پردهبرداری میکند. ربات ۴ پایی که به وسیله انسانها کنترل میشود. این ربات به خاطر زیرکتر بودنش نسبت به رباتهای پیشین شناخته میشود و از این بابت محبوب است. چون این ربات میتواند روی ۲ پا هم بایستد. این ربات ۵۰ حسگر دارد و همچنین دارای یک کامپیوتر همراه نیز هست که مدیریت راه رفتن و حفظ تعادل ربات را بر عهده دارد.

در سال ۲۰۰۴ آژانس پروژههای تحقیقاتی پیشرفته وزارت دفاع آمریکا، چالش بزرگ «دارپا» (DARPA) را برقرار کرد؛ مسابقه خودروهای خودران که هدفش الهامبخشی برای نوآوری در فناوری وسایط خودران نظامی بود.
در ۲۰۰۵ یک خودرو Touareg متعلق به شرکت فولکس واگن که آن را استنلی نامگذاری کرده بودند در دومین چالش بزرگ دارپا برنده میشود. این خودرو به یک هوش مصنوعی آموزش داده شده بر اساس عادتهای رانندگی انسانها و حسگرهای لیزری ۵ لیداری برای تکمیل یک مسابقه ۱۳۱ مایلی در صحرای موهاوی مجهز بود.
تاریخچه رباتیک در دهه ۲۰۱۰ میلادی
سال ۲۰۱۱ ناسا و ژنرال موتور با هم همکاری کردند و «روبونات ۲»، ربات دستیار انسان، را با شاتل فضایی دیسکاوری به فضا فرستادند. این ربات به ساکن دائمی ایستگاه بینالمللی فضایی تبدیل شد.
در سال ۲۰۱۳، شرکت بوستون داینامیک ربات «اطلس» (Atlas) را منتشر کرد. در این مطلب پیشتر هم راجع به اطلس بحث شد. اطلس ربات انساننمای دو پایی است که از ۲۸ مفصل هیدرولیک برای تقلید حرکتهای انسان استفاده میکند. این ربات میتواند از پشت ملق بزند.
سال ۲۰۱۲ اولین گواهینامه برای خودرویی خودران در نوادا صادر شد. این ماشین یک تویوتا پریوس محسوب میشود که با فناوری توسعه داده شده توسط گوگل سفارشیسازی شده است.
در سال ۲۰۱۴ محققان کانادایی، hitchBOT را توسعه دادند؛ رباتی به عنوان عضوی از تحقیقات اجتماعی که در کشور کانادا و اروپا مجانی سفر میکند یا به اصطلاح هیچهایک میکند.

سال ۲۰۱۶ سوفیا، رباتی انساننما که لغب اولین ربات شهروند را یدک میکشد، توسط شرکت هانسون رباتیک ساخته شد. این ربات قادر به تشخیص چهره، ارتباط کلامی و ارائه حالت چهره است.
تاریخچه رباتیک در دهه ۲۰۲۰ میلادی
در سال ۲۰۲۰ رباتها برای توزیع تستهای کووید و فرایند واکسیناسیون به کار گرفته شدند. در این سال، ۳۸۴ هزار ربات صنعتی در نقاط مختلف جهان برای انجام کارهای تولیدی و انبارداری ارسال و دریافت شدند. در سال ۲۰۲۱ شرکت تولید خودرو به نام «کروز» (Cruise) برای اولین بار آزمایش ۲ مدل «تاکسی رباتیک» (Robotaxi) خود را در سان فرانسیسکو انجام داد.

سال ۲۰۲۲ نیز سال بسیار مهمی برای صنعت رباتیک به حساب میآید. در این سال پیشرفتهای بسیار زیادی در زمینه رباتیک حاصل شده است. خصوصاً توجه به این مسئله بسیار اهمیت دارد که در سال ۲۰۲۲ استفاده از هوش مصنوعی در رباتیک به شدت گسترش پیدا کرد. همچنین یکی از مهمترین وقایع سال ۲۰۲۲ در خصوص رباتیک میتواند معرفی ربات انساننمای شرکت تسلا باشد.

جمعبندی
رباتیک شاخهای از مهندسی است که شامل ایدهپردازی، طراحی، ساخت و ساز و راهاندازی رباتها میشود. هدف در حوزه رباتیک خلق ماشینهای هوشمندی است که میتوانند به شکلهای مختلف به انسانها کمک کنند. در این مطلب ابتدا به این پرسش پاسخ داده شد که رباتیک چیست و سپس در بخش تعریف رباتیک نیز توضیحات بیشتری ارائه شدند تا دقیقتر چیستی رباتیک را درک کنیم. سپس در ادامه به دو موضوع پرجستجو و مهم یعنی رباتیک کودکان و رشته رباتیک پرداختیم. در ادامه نیز انواع رباتیک، نحوه عملکرد رباتها، اجزای اصلی آنها، کاربرد رباتیک و در نهایت تاریخچه رباتیک شرح داده شد.






بسیار کامل و جامع . ممنون از لطفتون
با سلام و احترام؛
صمیمانه از همراهی شما با مجله فرادرس و ارائه بازخورد سپاسگزاریم.
از اینکه این مطلب مورد توجه شما قرار گرفته است بسیار خرسند و مفتخریم.
برای شما آرزوی سلامتی و موفقیت داریم.
برای مباحث رباتیک و هوش مصنوعی از چی برنامه نویسی استفاده میکنن که جامع و کاربردی تر باشه ؟
با سلام و احترام؛
صمیمانه از همراهی شما با مجله فرادرس و ارائه بازخورد سپاسگزاریم.
اول از همه میتوان زبان برنامه نویسی پایتون را به عنوان پرکاربردترین و مناسبترین زبان برای برنامه نویسی رباتیک و هوش مصنوعی در نظر گرفت. پس از آنها زبانها C++ و جاوا در این حوزه پرکاربرد و مفید هستند. برای یادگیری زبان برنامه نویسی پایتون میتوانید از دوره آموزشی زیر استفاده کنید:
برای شما آرزوی سلامتی و موفقیت داریم.