



موتورها و انتخاب درست آنها – بخش دوم (معرفی موتورهای براش و براشلس)
در این پست و در ادامه مبحث موتورها، به معرفی موتورهای دیسی براش (DC Brush Motors) و براشلس (Brushless Motors)، تفاوت بین آنها و نحوه به کارگیری آهنرباها و آهنرباهای الکتریکی در آنها خواهیم پرداخت.



موتورهای دیسی براش - نسل قدیم

یکی از سادهترین موتورهای مورد استفاده امروزی، موتور براش دیسی (DC Brush Motor) است. این موتورها، تقریباً در همه جا موجود هستند.
لوازم خانگی، اسباببازیها و اتومبیلها از وسایل به کارگیرنده این گونه موتورها هستند. به دلیل ساخت و کنترل آسان، استفاده از این موتورها بین افراد حرفهای و علاقهمندان رایج است.
ساختار موتورهای براش

برای درک نحوه کار این موتورها، اجزای داخلی یک موتور ساده را تشریح میکنیم. همان طور که در شکل زیر دیده میشود، این موتورها دارای ساختاری ساده به همراه چند جز اصلی هستند.

- جاروبکها (Brushes) – نیرو را از طریق اتصالات و با کمک جابهجاگر (Commutator) به آرمیچر (Armature) انتقال میدهد.
- اتصالات (Contacts) – نیرو را از کنترلرها (Controllers) به جاروبکها انتقال میدهد.
- جابهجاگر (Commutator) - در هنگام چرخش آرمیچر، نیرو را به مجموعهی مناسب سیمپیچها انتقال میدهد.
- سیمپیچها (Windings) – الکتریسیته را به میدان مغناطیسی محرک محور تبدیل میکند.
- محور (Axle) – نیروی مکانیکی موتور را برای استفاده مورد نظر انتقال میدهد.
- آهنرباها (Magnets) – یک میدان مغناطیسی برای جذب و دفع سیمپیچها به وجود میآورد.
- بوش (Bushing) – اصطکاک محور را به حداقل میرساند.
- محفظه (Can) – پوشش مکانیکی مورد نیاز برای موتور را فراهم میکند.
مبانی نظری عملکرد موتورهای براش

زمانی که انرژی مورد نیاز به سیمپیچها برسد، آنها به سمت آهنرباهای قرار گرفته در اطراف موتور جذب میشوند. این عمل تا زمانی که جاروبکها با سری بعدی اتصالات جابهجاگرها تماس پیدا کنند، موتور را به چرخش در میآورد. این تماس باعث تأمین انرژی به سری بعدی سیمپیچها شده و فرآیند قبلی دوباره تکرار میشود. معکوس کردن قطبیت اتصالات موتور، جهت چرخش موتور به سادگی معکوس میشود. پرش جاروبکها به اتصالات بعدی باعث ایجاد جرقه در درون یک موتور براش میشود. هر سیم یک سیمپیچ به دو اتصال جابهجاگر متصل میشود.

برای جلوگیری از قفل شدن و ثابت ماندن موتور، همیشه از تعداد فرد سیمپیچ استفاده میشود. در موتورهای بزرگتر، جهت حذف مشکل «گشتاور دندانهای» از تعداد سیمپیچهای بیشتری استفاده میشود. این امر باعث کنترل بهتر موتور در دور بر دقیقههای (RPMs) کمتر میشود. گشتاور دندانهای توسط چرخش دستی محور موتور قابل مشاهده است. در صورت وجود این مشکل، حالتی مشابه دستانداز در محل آهنرباهای نزدیک به استاتور (stator) احساس میشود. گشتاور دندانهای با به کارگیری یک سری ترفند در طراحی موتور قابل حل است. یکی از این ترفندها، حذف کامل استاتور از ساختار موتور است. به این نوع موتورها، موتورهای بدون آهن (Ironless) یا بدون هسته (Coreless) گفته میشود.
مزایای موتورهای براش
- کنترل آسان
- گشتاور عالی در دورهای پایین
- تولید ارزان و انبوه
معایب موتورهای براش
- فرسوده شدن جاروبکها در طول زمان
- قوس جاروبک میتواند باعث ایجاد نویز الکترومغناطیسی شود
- محدودیت در سرعت چرخش به دلیل افزایش دمای جاروبک
موتورهای براشلس - قدرت بیشتر

موتورهای براشلس (Brushless motors)، شروع به تسلط بر بازارهای صنعت سرگرمی (مانند اسباببازیهای کنترلی) کردهاند. در ابتدا، کنترل کردن این نوع از موتورها، مانع بزرگی بود اما با ارزان و قدرتمندتر شدن میکروکنترلرها (microcontrollers)، این مانع برطرف شد. با این حال، برای توسعه کنترلرهای سریعتر و کارآمدتر، کارهای بیشتری باقی مانده است. بدون وجود جاروبکها، این موتورها، قدرت بیشتری را انتقال داده و صدای کمتری را تولید میکنند. جدیدترین وسایل نقلیه و وسایل خانگی، در حال حرکت به سمت سیستمهای براشلس هستند. یکی از بهترین مدل از این موتورها، «Tesla Model S» است.
ساختار یک موتور براشلس

برای درک بهتر نحوه عملکرد یک موتور براشلس، اجزای داخلی این نوع موتور را در شکل زیر آوردهایم. این موتورها، بیشتر در هلیکوپترها و هواپیماهای کنترلی به کار میروند.

- سیمپیچها - الکتریسیته را به میدان مغناطیسی مورد نیاز برای حرکت روتور (Rotor) تبدیل میکنند.
- اتصالات - انرژی مورد نیاز را از طریق کنترلر به سیمپیچها میرسانند.
- یاتاقانها - اصطکاک محور را به حداقل میرسانند.
- آهنرباها - میدان مغناطیسی مورد نیاز برای جذب و دفع سیمپیچها را فراهم میکنند.
- محور - انرژی مکانیکی موتور را جهت کارکرد مورد نظر انتقال میدهد.
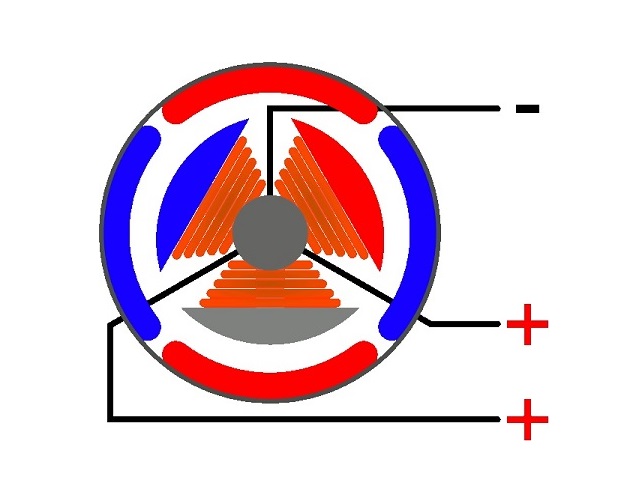
مبانی نظری عملکرد موتورهای براشلس
ساختار مکانیکی یک موتور براشلس بسیار ساده است. تنها بخش محرک در این نوع موتورها، روتور است. روتور، آهنرباها را در خود جای میدهد. نحوه عملکرد این موتورها زمانی پیچیده میشود که بحث هماهنگی بین توالی دریافت انرژی در سیمپیچها باشد. قطبیت هر یک از سیمپیچها توسط جهت جریان فعلی کنترل میشود. تصویر زیر، الگوی سادهای که کنترلرها دنبال میکنند را نشان میدهد. جریان متناوب، قطبیت هر سیمپیچ را تغییر داده و اثر «جذب و دفع» را در آنها به وجود میآورد. ترفند کار این موتورها، هماهنگ نگه داشتن این الگو با سرعت روتور است. این کار به دو روش انجام میشود. بیشتر کنترلرها، ولتاژ تولیدشده در سیمپیچ غیرفعال را اندازه میگیرند (نیروی ضد محرکه). در عملکردهایی با سرعت بالا، این روش بسیار قابل اعتماد است. با کمتر شدن سرعت چرخش موتور، اندازهگیری ولتاژ تولیدشده بسیار سختتر شده و خطای آن بالا میرود. کنترلرهای جدید و بسیاری از کنترلرهای صنعتی، برای اندازهگیری مستقیم محل قرارگیری آهنرباها از حسگر اثر هال (Hall effect sensor) استفاده میکنند. این روش اولیه برای کنترل فنهای کامپیوتر (Computer Fans) است.
مزایای موتورهای براشلس
- قابلیت اعتماد بالا
- سرعت بالا
- کارآمدی بالا
- تولید انبوه و در دسترس بودن آسان
معایب موتورهای براشلس
- کنترل دشوار در صورت عدم وجود کنترلر مخصوص
- نیاز به ظرفیت شروع پایین
- نیاز به گیربکس (gearboxes) مخصوص در کارکردهای محرک
در بخش بعدی و نهایی این پست، به توضیح در مورد موتورهای استپر (Stepper Motors) و موتورهای خطی (Linear Motors) خواهیم پرداخت.
مطالب مرتبط:
موتورها و انتخاب گزینه مناسب از بین آنها – بخش اول (مبانی الکترومغناطیس)
موتورها و انتخاب گزینه مناسب از بین آنها – بخش سوم (معرفی موتورهای استپر و خطی)





تشکر از فرادرس