



موتور الکتریکی – از صفر تا صد
«موتور الکتریکی» (Electric Motor) انرژی الکتریکی را به «انرژی جنبشی» (kinetic energy) تبدیل میکند. عمل عکس آن یعنی تبدیل انرژی جنبشی به انرژی الکتریکی توسط «ژنراتور» (generator) یا «دینام» (dynamo) انجام میشود. ساختمان کلی این دو «ماشین» (machine) به هم شبیه است و در برخی موارد یک ماشین میتواند هر دو نقش موتوری و ژنراتوری را بازی کند. برای مثال، موتورهای «کشش» (traction) لوکوموتیوهایی که دارای ترمز دینامیکی هستند، در هر دو نقش ظاهر میشوند و در هنگام ترمز، انرژی جنبشی را به انرژی الکتریکی تبدیل و ذخیره میکنند.



اغلب موتورهای الکتریکی بر اساس اصول «الکترومغناطیس» (electromagnetism) به حرکت درمیآیند، اما موتورهایی که بر اساس دیگر «پدیدههای الکترو مکانیکی» (electromechanical phenomena) مانند «نیروی الکترو استاتیک» (electrostatic force) و «اثر پیزو الکتریک» (piezoelectric effect) کار میکنند، نیز وجود دارند. اصل اساسی در موتورهای الکترومغناطیسی این است که به سیمهای حامل جریان الکتریکی در داخل «میدان مغناطیسی» (magnetic field) نیروی مکانیکی اعمال میشود. این نیرو در «قانون نیروی لورنتز» (Lorentz force law) تشریح شده است. جهت این نیرو بر هر دو میدان مغناطیسی و سیم حامل جریان عمود است که با استفاده از قانون دست راست به دست میآید. در شکل زیر قانون دست راست بیان شده است.

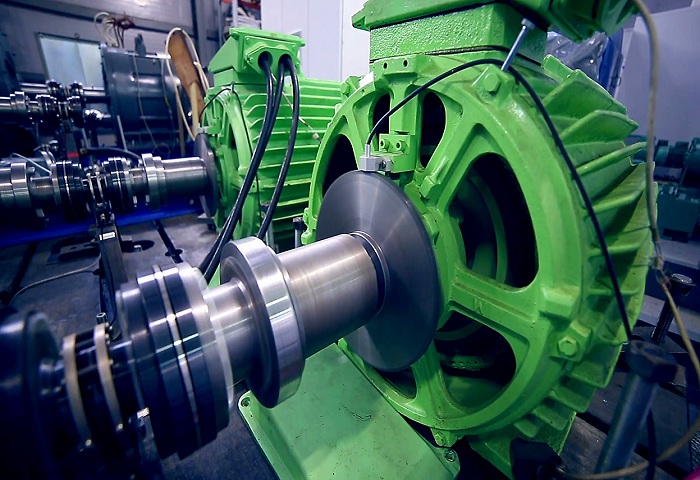
اغلب موتورها «دوار» (rotary) هستند، اما موتورهای «خطی» (linear) نیز وجود دارند. در یک موتور دوار، قسمت دوار که اغلب در داخل قرار دارد «روتور» (rotor) و قسمت ایستا «استاتور» (stator) نامیده میشود. «آرمیچر» (Armature) آن بخش از موتور الکتریکی است که به آن ولتاژ ورودی اعمال میشود یا آن بخش از ژنراتور است که در آن ولتاژ خروجی ایجاد میشود. با توجه به طراحی ماشین، روتور یا استاتور هر کدام میتواند به عنوان آرمیچر باشد. در شکل زیر استاتور و روتور در یک موتور الکتریکی مشخص شده است.

در ادامه به معرفی انواع موتور الکتریکی و کارکرد آنها میپردازیم. در شکل زیر چند نمونه موتور الکتریکی نشان داده شده است.

موتورهای جریان مستقیم
یکی از اولین موتورهای دوار الکترومغناطیسی توسط «مایکل فارادی» (Michael Faraday) در سال ۱۸۲۱ میلادی اختراع شد و شامل یک سیم آویخته شدهی آزاد که در یک ظرف جیوه غوطهور بود، میشد. یک «آهنربای دائم» (permanent magnet) در وسط ظرف قرار داده شده بود. وقتی که جریانی از سیم عبور میکرد، سیم حول آهنربا به گردش در میآمد و نشان میداد که جریان منجر به افزایش یک میدان مغناطیسی دایرهای اطراف سیم میشود.

این موتور اغلب در کلاسهای فیزیک مدارس نشان داده میشود، اما گاهی به جای ماده سمی جیوه ، از آب نمک استفاده میگردد. این موتور سادهترین شکل از موتورهای الکتریکی است که «موتور هوموپولار» (homopolar motor) نامیده میشود. موتور اصلاح شدهی بعدی که از چرخ در آن استفاده شده «چرخ بارلو» (Barlow’s Wheel) است. در شکل زیر نمونهای از چرخ بارلو به همراه تعیین جهت حرکت با استفاده از قانون دست نشان داده شده است.

یکی دیگر از طراحیهای اولیه موتور الکتریکی از یک «پلانجر رفت و برگشتی» (reciprocating plunger) در داخل یک «سلونوئید سوییچ شده» (switched solenoid) استفاده میکرد؛ به طور مفهومی میتوان آن را به عنوان یک نسخه الکترومغناطیسی از یک «موتور احتراق داخلی» (internal combustion engine) دو مرحلهای مشاهده کرد. سلونوئید سیم پیچیای دارای طول است که وقتی یک شدت جریان به آن متصل شود باعث به وجود آمدن میدان مغناطیسی میشود. «توماس داونپورت» (Thomas Davenport) در سال ۱۸۳۴ میلادی یک موتور الکتریکی DC کوچک برای یک قطار اسباب بازی که در یک مسیر دایرهای حرکت میکرد ساخت. او این اختراع خود را در سال ۱۸۳۷ میلادی به ثبت رساند.
«موتور جریان مستقیم» (Direct Current Motor) یا «DC» امروزی به صورت تصادفی در سال ۱۸۷۳ میلادی اختراع شد. زمانی که «زنوب گرام» (Zénobe Gramme) یک دینام چرخشی به یک واحد مشابه دیگر متصل کرد تا به عنوان یک موتور کار کند. ماشین گرام اولین موتور الکتریکی صنعتی بود. اختراعات قبلی به عنوان اسباب بازی یا کنجکاوی آزمایشگاهی در نظر گرفته میشوند. موتور کلاسیک DC دارای آرمیچری روی روتور به شکل «آهنربای الکتریکی» (electromagnet) است. یک سوییچ دوار به نام «کموتاتور» (commutator) جهت جریان الکتریکی را در آرمیچر در هر سیکل دو بار برعکس میکند تا «قطبهای» (poles) آهنرباهای الکتریکی، «آهنربای دائمی» (permanent magnet) واقع در استاتور را جذب و دفع کنند. در واقع کموتاتور «پلاریته» (polarity) آهنربای الکتریکی آرمیچر را با عبور قطبهای آهنربای الکتریکی آرمیچر از جلوی قطبهای آهنربای دائمی استاتور معکوس میکند. در طول این جابجایی پلاریته، «تکانه» (momentum) روتور در یک جهت ثابت میماند و روتور به چرخش خود ادامه میدهد. در شکل زیر این عملکرد نشان داده شده است.

موتورهای میدان سیم پیچی شده
آهنرباهای دائم در محیط بیرونی (استاتور) یک موتور DC ممکن است با آهنرباهای الکتریکی تعویض شود. با تغییر جریان سیم پیچی میدان (تحریک)، این پدیده که نسبت سرعت به «گشتاور» (torque) موتور تغییر کند ممکن میشود. به طور نمونه سیم پیچی میدان به صورت سری با سیم پیچی آرمیچر قرار داده میشود تا یک موتور گشتاور بالا و سرعت کم حاصل شود و اگر سیم پیچی میدان به صورت موازی (شنت) با سیم پیچی آرمیچر قرار داده شود، یک موتور گشتاور کم و سرعت بالا خواهیم داشت.
برای تعادل سرعت و گشتاور قسمتی از سیم پیچی میدان سری و قسمتی از آن موازی با سیم پیچی آرمیچر (سیم پیچی کمپوند) قرار داده میشود تا سرعت تقریبا ثابتی را در محدودهی تغییرات بار فراهم کند. موتور «تحریک مستقل» (separate excitation) نیز در صنعت رایج است. در این موتور با ثابت نگه داشتن ولتاژ سیم پیچی میدان، سرعت با تغییر ولتاژ سیم پیچی آرمیچر کنترل میشود. به علاوه با کاهش ولتاژ سیم پیچی میدان و به تبع کاهش جریان آن میتوان به سرعت بالاتر و گشتاور پایینتر دست یافت که بهره برداری «میدان ضعیف» (weak field) خوانده میشود. در مجموع با استفاده از این تکنیکها کنترل سرعت در موتور DC فراهم میشود. در شکل زیر مدارهای موتورهای DC سری و شنت و کمپوند نشان داده شده است.

تئوری
اگر «شافت» (shaft) موتور DC با نیروی خارجی به حرکت درآید، موتور شبیه یک ژنراتور عمل میکند و «نیروی الکتروموتیو» (EMF | Electromotive force) تولید میکند. این ولتاژ حاصل از EMF همچنین در طول کارکرد عادی موتوری تولید میشود. چرخش موتور یک ولتاژ تولید میکند که به عنوان «عکس العمل EMF» معادل (CEMF; counter-EMF) یا بازگشت EMF نامیده میشود، زیرا با ولتاژ اعمال شده در موتور مخالف است. بنابراین، افت ولتاژ در یک موتور شامل افت ولتاژ به علت CEMF و افت ولتاژ ناشی از «مقاومت» (resistance) داخلی سیم پیچیهای آرمیچر میشود.

به دلیل این که CEMF متناسب با سرعت موتور است، زمانی که یک موتور الکتریکی در ابتدای راه اندازی است یا روتور قفل شده است، میزان CEMF برابر صفر است. بنابراین در این حالت گذرا جریان گذرنده از آرمیچر بسیار بالا است. این جریان بالا یک میدان مغناطیسی قوی ایجاد میکند که چرخش موتور را آغاز میکند. همان طور که چرخش موتور افزایش مییابد، CEMF نیز افزایش مییابد، تا آنکه برابر ولتاژ اعمالی منهای افت ولتاژ ناشی از مقاومت داخلی سیم پیچهای آرمیچر شود. در این نقطهی پایدار، جریان گذرنده از آرمیچر در کمترین حالت ممکن است.
موتورهای یونیورسال
یکی از انواع موتورهای DC میدان سیم پیچی شده، «موتور یونیورسال» (Universal motors) است. به دلیل این که این موتورها را میتوان هم با جریان DC و هم AC تغذیه کرد، این موتورها را یونیورسال نام نهادهاند، گرچه اغلب در عمل این موتورها با تغذیهی AC به کار میروند. اصول کار این موتورها این گونه است که وقتی یک موتور DC میدان سیم پیچی شده با جریان متناوب تغذیه میشود، جریان هم در سیم پیچی میدان و هم در سیم پیچی آرمیچر (و از این رو در میدانهای مغناطیسی حاصل شده) به صورت هم زمان تغییر میکند و بنابراین نیروی مکانیکی تولید شده همواره در یک جهت است. امپدانس سیم پیچیهای موتور باید به گونهای طراحی شود تا با جریان AC سازگاری داشته باشد که باعث میشود این موتور اغلب بازده کمتری نسبت به یک موتور معادل DC داشته باشد. در فرکانسهای عادی (۵۰ یا ۶۰ هرتز) خط قدرت، حداکثر توان خروجی موتورهای یونیورسال محدود است و موتورهای بیش از یک «کیلو وات» (kilowatts) نادر هستند. اما موتورهای یونیورسال همچنین پایهی موتورهای کششی راهآهنهای سنتی را تشکیل میدهند. در این کاربرد، برای حفظ بهره وری الکتریکی بالا، از منابع با فرکانس پایین استفاده میشود که عملکرد آنها در 25 هرتز و ۱۶ ۲/۳ هرتز معمول است. همچنین لوکوموتیوهایی که دارای موتورهای یونیورسال هستند قادرند در راه آهنهای نسل سوم که تغذیه DC دارند حرکت کنند.

مزیت موتورهای یونیورسال این است که میتوان تغذیه AC را روی موتورهایی که دارای مشخصههای نوعی از موتورهای DC هستند به کار برد، خصوصاً اینکه این موتورها دارای گشتاور راه اندازی بسیار بالا و طراحی بسیار فشرده در سرعتهای بالا هستند. جنبه منفی این موتورها تعمیر و نگهداری و عمر کوتاه آنها است که به علت وجود کموتاتور است و در نتیجه این موتورها معمولا در دستگاههای AC نظیر مخلوط کن و ابزارهای برقی که گاهی استفاده میشوند، به کار میروند. کنترل سرعت پیوسته یک موتور یونیورسال با تغذیه AC به راحتی با استفاده از یک مدار تریستوری انجام میشود، در حالی که کنترل سرعت پلهای با استفاده از چندین تپ روی «کویل» (coil) میدان انجام میشود.
بر خلاف موتورهای AC، موتورهای یونیورسال به راحتی میتوانند از یک دور در هر سیکل جریان برق تجاوز کنند. این کار باعث میشود آنها برای لوازم خانگی مانند مخلوط کن، جارو برقی و سشوار، که عملیات با سرعت بالا مورد نظر است مفید باشند. برای مثال دور موتور بسیاری از جاروبرقیها و موتورهای برش علفهای هرز از 10،000 دور در دقیقه تجاوز میکند. از لحاظ تئوری یک موتور یونیورسال بدون بار مکانیکی با «سرعت بالاتر از حد مجاز» (overspeed) کار خواهد کرد که باعث خسارت آن خواهد شد. ولی در واقعیت، «اصطکاکهای» (frictions) گوناگون «یاتاقان» (bearing)، «مقاومت هوای» (windage) آرمیچر و بار هر «فن خنک کننده » (cooling fan)، همگی از سرعت بالاتر از حد مجاز جلوگیری میکنند.
با هزینه بسیار پایین از یکسو کنندههای نیمه هادی، برخی کاربردها که قبلا از یک موتور یونیورسال استفاده کردهاند، الآن از یک موتور DC، معمولا با یک میدان مغناطیسی دائمی استفاده میکنند. این امر به ویژه اگر مدار نیمه هادی برای کنترل سرعت متغیر نیز مورد استفاده قرار گیرد، بسیار مناسب است. از مزایای موتور یونیورسال و توزیع جریان متناوب، نصب سیستم توزیع جریان با فرکانس کم و مقرون به صرفه برای بعضی از تأسیسات راه آهن است. در فرکانسهای به اندازه کافی کم، عملکرد موتور تقریبا مشابه وقتی است که موتور در جریان مستقیم عمل میکند. در شکل زیر نمونهای از یک موتور یونیورسال نشاده داده است.

موتورهای «جریان متناوب» (AC: Alternating Current)
در سال ۱۸۸۲ میلادی، «نیکلا تسلا» (Nikola Tesla) اصل میدان مغناطیسی چرخشی را شناسایی کرد و پیشگام استفاده از یک میدان چرخشی برای نیروی کارکرد ماشینآلات شد. او از این اصل برای طراحی یک موتور القایی دو فاز منحصر به فرد در سال 1883 م استفاده کرد. در سال 1885، «گالیله فراریس» (Galileo Ferraris) به طور مستقل این مفهوم را مورد بررسی قرار داد. در سال ۱۸۸۸ م، فراریس تحقیقات خود را در مقالهای در آکادمی سلطنتی علوم در تورین منتشر کرد.
اختراع موتور تسلا از سال 1888 آغاز به کار کرد که به عنوان انقلاب صنعتی دوم شناخته میشود و امکان تولید بهینه و توزیع انرژی الکتریکی از راه دور را با استفاده از سیستم انتقال جریان متناوب فراهم کرد. قبل از ابداع میدان مغناطیسی چرخشی، موتورها با عبور مداوم رسانا از میان میدان مغناطیسی ایستا (مانند موتورهای homopolar) عمل میکردند. تسلا پیشنهاد کرده بود که کموتاتورهای یک ماشین میتواند برداشته شود و دستگاه بتواند با نیروی حاصل از یک میدان چرخشی کار کند. «پروفسور پوچل» (Professor Poeschel) ، استادش، اظهار داشت که او به ساخت یک ماشین حرکت دائمی نزدیک میشود. تسلا بعدا در دسامبر سال ۱۸۸۹ م به ثبت اختراع موتور الکتریکی در ایالات متحده که شبیه موتور در بسیاری از عکسهای تسلا است، دست یافت. این موتور الکترومغناطیسی جریان متناوب کلاسیک یک موتور القایی بود.
بعدا «میخائیل اوسپویچ دولیوو-دوبرولسکی» (Michail Osipovich Dolivo-Dobrovolsky) موتور القایی سه فاز «روتور قفسه سنجابی» (squirrel cage rotor) را در سال ۱۸۹۰ م اختراع کرد. با استفاده از این اختراع، سیستم چند فاز تجاری تولید و انتقال انرژی الکتریکی از راه دور به صورت موفق توسط «آلمرین دکر» (Almerian Decker) در Mill Creek در Redlands California طراحی شد.
اجزا و انواع موتور AC
یک موتور AC متشکل از دو بخش است که عبارتند از:
جز بیرونی: یک استاتور ایستا که دارای کویلهایی است که با جریان متناوب برای تولید میدان مغناطیسی دوار تغذیه میشود. در شکل زیر استاتور و سیم پیچی آن نشان داده شده است.

جز درونی: یک روتور متصل به شفت خروجی است که توسط میدان مغناطیسی دوار گشتاور داده میشود. در شکلهای زیر دو نمونه روتور قفسه سنجابی و سیم پیچی شده نشان داده شده است.

دو نوع اساسی موتور AC وجود دارد که بسته به نوع روتور مورد استفاده قرار میگیرد. این دو نوع عبارت هستند از:
- «موتور سنکرون» (synchronous motor): سرعت چرخش این موتور دقیقا متناسب با فرکانس تغذیه است.
- «موتور القایی» (induction motor): سرعت چرخش این موتور کمی کندتر از موتور سنکرون است و به طور معمول (هر چند نه الزاما همیشه) موتور با روتور قفس سنجابی است.
موتورهای القایی AC سه فاز
در جایی که تغذیه چند فاز موجود است، خصوصا برای موتورهای با توان بالاتر، از موتورهای القایی سه فاز AC (یا چند فاز) استفاده میشود. اختلاف فاز موجود بین فازهای تغذیه چند فاز الکتریکی، یک میدان الکترومغناطیسی دوار درون این موتورها ایجاد میکند.

از طریق القای الکترومغناطیسی، میدان مغناطیسی چرخشی، جریان را در هادیها در روتور ایجاد مینمایدکه به نوبه خود یک میدان مغناطیسی متعادل ایجاد میکند که سبب چرخاندن روتور در جهت چرخش میدان میشود. روتور همیشه باید کندتر از میدان مغناطیسی چرخشی تولید شده توسط منبع تغذیه چند فازی باشد؛ در غیر این صورت، هیچ جریان و میدان مغناطیسی متعادلی در روتور تولید نخواهد شد.
موتورهای القایی نیروی کار صنعتی هستند و موتورهایی که توان خروجی آنها حدود 500 کیلو وات (۶۷۰ اسب بخار) است در اندازههای بسیار استاندارد تولید میشوند و تقریبا به طور کامل قابل تعویض بین تولید کنندگان هستند (اگرچه ابعاد استاندارد اروپایی و آمریکای شمالی متفاوت است). موتورهای سنکرون بسیار بزرگ (مانند موتورهای مورد استفاده برای کمپرسورهای خط لوله) قادر به تولید دهها هزار کیلو وات در خروجی هستند. در شکل زیر یک موتور القایی AC سه فاز با روتور قفسه سنجابی نشان داده شده است.

دو نوع روتور مورد استفاده در موتور القایی وجود دارد و در ادامه به شکل مفصلی به آنها خواهیم پرداخت.
«روتورهای قفسه سنجابی» (Squirrel Cage rotors): اغلب موتورهای AC عمومی از روتورهای قفسه سنجابی استفاده میکنند که در تقریبا تمام موتورهای متداول خانگی و صنعتی یافت میشود. قفس سنجابی نام خود را از شکل خود میگیرد – حلقهای در هر دو طرف روتور، با میلههایی در طول روتور که به حلقهها متصل اند. این میلهها معمولا از جنس آلومینیوم یا مس اند که بین ورقههای آهن روتور ریخته میشوند و معمولا فقط حلقههای انتهایی قابل مشاهده هستند. اکثریت وسیع جریانهای روتور از طریق میلههای مسی یا آلومینیومی به جای ورقههای با مقاومت بالا و لاکها جریان مییابند. در موتورهای با بازده بالا، اغلب از مس ریخته گری برای کاهش مقاومت در روتور استفاده میشود.
در عمل، موتور قفس سنجابی ممکن است به عنوان یک ترانسفورماتور با «ثانویه دورانی» (rotating secondary) مشاهده شود - هنگامی که روتور هم زمان (سنکرون) با میدان مغناطیسی نمیچرخد، جریانهای بزرگ روتور ایجاد میشوند؛ جریانهای بزرگ روتور، روتور را مغناطیسی میکنند و با اثر متقابل با میدان مغناطیسی استاتور باعث میشوند روتور به سنکرون شدن با میدان استاتور نزدیک شود. یک موتور قفس سنجابی بدون بار که در سرعت بسیار نزدیک به سنکرون میچرخد، توان الکتریکی کمی را فقط برای حفظ سرعت روتور در برابر اصطکاک و تلفات مقاومت مصرف میکند. هرگاه بار مکانیکی افزایش یابد توان الکتریکی مصرفی افزایش مییابد. بنابراین بار الکتریکی ذاتا مربوط به بار مکانیکی است. این امر مشابه ترانسفورماتور در نظر گرفته میشود؛ جایی که بار الکتریکی اولیه به بار الکتریکی ثانویه مرتبط است.
به همین دلیل، به عنوان مثال، وقتی یک موتور قفس سنجابی «دمنده» (blower) روشن میشود، ممکن است روشنایی لامپ خانه را کم کند، اما وقتی تسمهی فن آن (و به همین ترتیب بار مکانیکی) برداشته میشود، روشنایی را کم نمیکند. علاوه بر این، یک موتور قفس سنجابی قفل شده (یا دارای اضافه بار) که استارت میشود جریانی میکشد که فقط با مقاومت مدار محدود میشود. به استثنای موارد دیگری که جریان محدود میشود (یا قطع کامل جریان اتفاق میافتد)، افزایش گرما و تخریب عایق سیم پیچ نتیجهی احتمالی افزایش بیش از حد جریان است. تقریبا هر ماشین لباسشویی، ماشین ظرف شویی، فن، پخش کننده و غیره از نوعی از یک موتور قفس سنجابی استفاده میکنند.
«روتور سیم پیچی شده» (Wound Rotor): روتور سیم پیچی شده زمانی مورد استفاده قرار میگیرد که سرعت متغیر مورد نیاز باشد. در این مورد، روتور همان تعداد قطبهای استاتور را داراست و «سیمپیچ» (winding) از سیمهایی ساخته شده است که به «حلقههای سایشی» (slip rings) روی شافت متصل اند. «جاروبکهای» (brushes) کربنی حلقههای سایشی را به کنترل کننده خارجی مانند مقاومت متغیر متصل میکنند که اجازه میدهد نرخ لغزش موتور تغییر کند. در درایوهای کنترل سرعت مربوط به موتورهای توان بالای روتور سیم پیچی شده، انرژی مربوط به تغییرات فرکانس هدر نمیرود بلکه یکسو شده و از طریق اینورتر به منبع تغذیه بازمیگردد.
در مقایسه با روتورهای قفس سنجابی، موتورهای روتور سیم پیچی شده گران هستند و نیاز به تعمیر و نگهداری حلقههای سایشی و جاروبکها دارند؛ با این حال قبل از ظهور تجهیزات الکترونیک قدرت برای کنترل سرعت متغیر به شکل استاندارد مورد بهرهبرداری قرار میگرفتند. در حال حاضر اینورترهای ترانزیستوری با درایو فرکانس متغیر برای کنترل سرعت مورد استفاده قرار میگیرند و موتورهای روتور سیمپیچی شده کمتر معمول هستند. درایوهای اینورتر ترانزیستوری همچنین اجازه میدهد که موتورهای سه فاز با بازده بیشتری مورد استفاده قرار گیرند - زمانی که تنها جریان تک فاز در دسترس است - اما آنها به دلیل ایجاد تداخل الکتریکی (هارمونیک زایی) و نیازهای توان بالا در دستگاههای خانگی هرگز استفاده نمیشوند.
چند روش برای استارت موتور چند فاز استفاده میشود. در جایی که «جریان هجومی» (inrush current) و گشتاور راه اندازی مجاز باشد، ترمینالهای موتور میتواند مستقیم به خط تغذیه وصل شود. به این روش «راه اندازی مستقیم» (DOL; Direct-On-Line) گویند. در جایی که نیاز باشد جریان هجومی محدود شود، ولتاژ راه اندازی با استفاده از «اندوکتورهای» (inductors) سری، «اتو ترانسفورماتور» (autotransformer)، «تریستورها» (thyristors)، یا دیگر تجهیزات کاهش مییابد. تکنیکی که گاهی اوقات استفاده میشود راه اندازی «ستاره-مثلث» (star-delta) است، که کویلهای موتور در ابتدای راه اندازی اتصال ستاره دارند، سپس وقتی که موتور به سرعت مناسب رسید کویلها به اتصال مثلث سوییچ میشوند. این تکنیک در اروپا بیشتر از آمریکای شمالی معمول است. درایوهای ترانزیستوری میتوانند مستقیما ولتاژ اعمالی را که به مشخصهی راه اندازی موتور و بار وابسته است تغییر دهند.
این نوع از موتور بیشتر در کاربردهای کشش از قبیل لوکوموتیو معمول است. سرعت در این نوع موتور به طور سنتی با داشتن مجموعهای از کویلها یا قطبهای اضافی در موتور تغییر میکند که میتواند روشن یا خاموش باشد تا سرعت چرخش میدان مغناطیسی را تغییر دهد. با این حال، تحولات در الکترونیک قدرت به این معنی است که فرکانس منبع تغذیه هم اکنون میتواند متناسب با کنترل یکنواخت سرعت موتور متغیر باشد.
موتورهای سنکرون AC سه فاز
اگر اتصالات به کویلهای روتور یک موتور سه فاز بر روی حلقههای سایشی برداشته شود و یک جریان میدان جداگانه برای ایجاد میدان مغناطیسی مداوم (یا اگر روتور از یک آهنربای دائمی تشکیل شده باشد)، نتیجهی آن را موتور سنکرون مینامند زیرا روتور در هماهنگی با میدان مغناطیسی چرخشی تولید شده توسط منبع تغذیه چند فازی چرخش مییابد. موتور سنکرون نیز میتواند به عنوان یک مولد جریان متناوب استفاده شود.
امروزه موتورهای سنکرون اغلب توسط درایوهای فرکانس متغیر ترانزیستور رانده میشوند که باعث میشود عمدتا مشکل راه اندازی روتورهای بزرگ در موتورهای سنکرون بزرگ حل شود. این موتورهای سنکرون بزرگ همچنین ممکن است در راه اندازی به عنوان موتور القایی که قفس سنجابی آن روی روتور جاسازی شده است استارت شوند: هنگامی که موتور به سرعت سنکرون میرسد، هیچ جریان الکتریکی در میلههای قفس سنجابی ایجاد نمیشود، بنابراین اثر کمی بر عملکرد موتور سنکرون، به غیر از تثبیت سرعت موتور در تغییرات بار دارد. موتورهای سنکرون گاهی اوقات به عنوان موتور کششی استفاده میشوند.
سروو موتورهای AC دو فاز
نوعی از «سروو موتور AC دو فاز» (two-phase AC servo motor) دارای یک روتور قفس سنجابی و یک میدان متشکل از دو سیم پیچ است: یک سیم پیچ اصلی ولتاژ ثابت (AC) و دیگری یک سیم پیچ ولتاژ کنترلی در آرایش چهارتایی با سیم پیچ اصلی که یک میدان مغناطیسی چرخشی تولید کند. مقاومت الکتریکی روتور عمدا بز

موتورهای القایی AC تک فاز
موتورهای سه فاز ذاتا میدان مغناطیسی دوار تولید میکنند. با این حال هر گاه فقط منبع توان تک فاز موجود است، میدان مغناطیسی دوار باید با استفاده از اسبابهای دیگر تولید شود. روشهای متعددی بدین منظور معمولا مورد استفاده قرار میگیرد.
یک نوع موتور AC تک فاز رایج، «موتور قطب چاک دار یا قطب سایه دار» (shading-pole motor) است، که در تجهیزاتی از قبیل فنهای الکتریکی یا دیگر تجهیزات خانگی کوچک استفاده میشود و احتیاج به گشتاور کمی دارند. در این موتور، حلقه مسی کوچک تک دور به نام «کویل سایه » (shading coil) میدان مغناطیسی راه اندازی را تولید میکند. قسمتی از هر قطب توسط حلقه مسی یا کویل سایه احاطه شده است. طبق «قانون لنز» (Lenz's Law) جریان القا شده در این حلقه با تغییرات شار مغناطیسی عبوری از داخل این کویل مخالفت میکند و باعث تضعیف میدان مغناطیسی در این قسمت سایه خورده از قطب میشود. بنابراین در هر سیکل شدت میدان از یک طرف به طرف دیگر قطب تغییر میکند، پس میدان مغناطیسی چرخشی مورد نیاز راه اندازی تولید میشود و از قفل شدن موتور در لحظه راهاندازی جلوگیری میکند.
نوع دیگر موتور AC تک فاز رایج، «موتور القایی فاز شکسته یا با انشقاق فاز» (split-phase induction motor) معمولا در کاربردهای زیادی مانند ماشینهای لباسشویی و خشک کن لباس استفاده میشود. در مقایسه با موتور قطب چاک دار، این موتورها به طور کلی با استفاده از «سیم پیچی راه اندازی» (startup winding) مخصوص در اتصال با یک «کلید گریز از مرکز» (centrifugal switch) میتوانند گشتاور راه اندازی بیشتری تولید کنند.
در موتور فاز شکسته، سیم پیچی راه اندازی مقاومت بالاتری از «سیم پیچی دائم» (running winding) دارد. این سیم پیچی راه اندازی یک مدار LR است که فاز جریان در سیم پیچی جریان را کمی شیفت میدهد. در هنگام استارت موتور، سیم پیچی راه اندازی به وسیلهی مجموعهای از فنرهای فشرده شده توسط کلید گریز از مرکز به منبع تغذیه متصل است. فاز میدان مغناطیسی در سیم پیچی راه اندازی از فاز میدان مغناطیسی در سیم پیچی دائم شیفت پیدا میکند که باعث ایجاد میدان مغناطیسی حرکتی میشود که موتور را راه میاندازد. هنگامی که موتور به نزدیکی سرعت بهره برداری طراحی شده (تقریبا ۷۵٪ سرعت نامی) میرسد، کلید گریز از مرکز فعال میشود، اتصالات را باز میکند و سیم پیچی راه اندازی را از منبع تغذیه جدا میکند. سپس موتور فقط با سیم پیچی دائم به عمل خود ادامه میدهد. سیم پیچی موتور حتما باید قطع شود وگرنه تلفات در موتور را افزایش میدهد.
نوع دیگر موتور AC تک فاز رایج، «موتور استارت خازنی یا با خازن راه انداز» (capacitor start motor) است. در یک موتور استارت خازنی، یک «خازن راه انداز» (starting capacitor) با سیم پیچی راه اندازی به صورت سری قرار داده میشود و یک مدار LC ایجاد میکند که قادر به شیفت فاز بیشتری است و بنابراین گشتاور راه اندازی بسیار بیشتری تولید میکند. البته این خازن باعث افزایش قیمت این موتورها نسبت به موتورهای فاز شکسته نیز میشود.
نوع دیگر موتور AC تک فاز رایج، «موتور استارت مقاومتی» (resistor start motor) است. در این نوع موتور، خازن استارت با یک مقاومت استارت جایگزین شده است. موتور استارت مقاومتی در کاربریهایی استفاده میشود که میزان گشتاور راه اندازی کمتر از مقداری که موتور استارت خازنی تولید میکند لازم است. هزینه تولید این موتور کمتر از موتور استارت خازنی است. این موتورها در «تسمه نقالههای» (belts) کوچک، پمپها و دمندههای بزرگ استفاده میشود.
دستهی دیگری از موتورهای AC تک فاز رایج، «موتور با خازن دائمی دوگانه» (PSC; Permanent Split-Capacitor motor) است. این موتور همچنین به عنوان موتور با یک خازن راه انداز-دائم شناخته میشود. این موتور الکتریکی همانند موتور استارت خازنی که در بالا توضیح داده شد عمل میکند، با این تفاوت که هیچ کلید گریز از مرکزی وجود ندارد و سیم پیچ دوم به همراه خازن دائما به منبع تغذیه متصل میماند. از آنجا که خازن، باید برای استفاده مداوم طراحی شده باشد، نمیتواند توان راه اندازی معادل یک موتور استارت خازنی ایجاد نماید. موتورهای (PSC) جریان راه اندازی پایین، معمولاً در کمتر از ۲۰۰ درصد جریان برآورد شده دارند که آنها را برای کاربریهایی با سرعتهای دارای چرخههای خاموش روشن بالا بسیار مناسب میسازد. موتورهای PSC امتیازات فراوانی دارند. طراحی موتور به راحتی برای استفاده با کنترلکنندههای سرعت میتواند اصلاح شود. همچنین میتوانند برای بازدهی بهینه و ضریب توان بالا در فشار برآورد شده طراحی شوند. آنها به عنوان قابل اطمینانترین موتور الکتریکی تک فاز مطرح میشوند؛ مخصوصا به این خاطر که به کلید گریز از مرکز نیازی ندارند. موتورهای PSC بسته به طراحیشان کاربری بسیار متنوعی دارند که شامل فنها، دمندهها با نیاز به گشتاور استارت کم و چرخههای کاری غیر دائمی مانند تنظیم دستگاهها (طرز کارها)، عملگر درگاهها و بازکنندههای درب گاراژها میشود. موتورهای PSC همچنین در «هواسازها» (air handlers)، فنها، دمندهها و موارد دیگر که سرعت متغیر مورد نظر است استفاده میشود.

نوع دیگر موتور AC تک فاز رایج، «موتور استارت با خازن/کارکرد با خازن» (capacitor start / capacitor run motor) است. این موتور، همانند موتور با استارت خازنی، خازنی راه انداز در حالت سری با سیم پیچ راه اندازی (کمکی) برای تولید گشتاور زیاد راه اندازی دارد. این موتور الکتریکی همچنین مانند یک موتور PSC خازنی دائم کار یعنی در مجموع دو عدد خازن دارد. خازن استارت در حالت سری با سیم پیچ کمکی است که بعد از شروع به کار موتور توسط کلید گریز از مرکز از مدار خارج میشود. این حالت سبب به وجود آمدن گشتاور بالایی میگردد. همچنین به علت داشتن خازن کارکرد دائمی سبب اصلاح «ضریب توان» (PF | Power Factor) میشود که باعث افزایش بازده موتور میشود. با این حال این موتور به خاطر خازنهای کارکرد و استارت و کلید گریز از مرکز آن پرهزینه است. این موتور بیش از هر موتور AC تک فاز دیگری استفاده میشود. این کاربریها شامل ماشینهای مرتبط با چوب، کمپرسورهای هوا، پمپهای آب فشار قوی، پمپهای تخلیه و دیگر کاربردهای نیازمند گشتاورهای بالا در حد ۱ تا ۱۰ اسب بخار میشود.
«موتورهای دفعی یا ریپالسیونی» (Repulsion motors) موتورهای AC تک فاز روتور سیم پیچی شده هستند که مشابه موتورهای یونیورسال دیده میشوند. در یک موتور دفعی، جاروبکهای آرمیچر با همدیگر اتصال کوتاه شدهاند به جای آنکه اتصال سری با میدان داشته باشند. چند نوع موتور الکتریکی دفعی تولید شده است، اما اغلب موتور «استارت دفعی/ کارکرد القایی» (RS-IR | repulsion-start induction-run) مورد استفاده قرار میگیرد. موتور RS-IR دارای کلید گریز از مرکز است که هنگامی که موتور به سمت سرعت کامل شتاب میگیرد تمام سگمنتهای کموتاتور (کلکتورها) را اتصال کوتاه میکند؛ به طوری که این موتور به عنوان موتور القایی عمل نماید. موتورهای RS-IR برای ارائه گشتاور بالا در هر آمپر در شرایط دمایی سرد و تنظیم ضعیف ولتاژ منبع مورد بهرهبرداری قرار میگیرند.
موتورهای سنکرون AC تک فاز
موتورهای AC تک فاز کوچک نیز میتوانند با روتورهای مغناطیس شده (و یا چندین تغییر در آن ایده) طراحی شوند. روتورهای این موتورها به جریان القا شده نیازی ندارند بنابراین علارغم موتورهای القایی، «موتورهای سنکرون AC تک فاز» (Single-phase AC synchronous motors)، لغزشی (عقب ماندگی سرعت) نسبت به سرعت سنکرون (متناسب با فرکانس شبکه) ندارند و با سرعت ثابت سنکرون میچرخند. به دلیل سرعت دقیق آنها، این موتورها معمولا برای استفاده از ساعتهای مکانیکی، صفحه گردونهی پخش صوتی و درایوهای نوار استفاده میشود. قبلا نیز ار ازین تجهیزات در ابزار زمانسنجی مانند ضبط نوار یا مکانیزمهای درایو تلسکوپ استفاده میشد.
موتورهای گشتاور
«موتور گشتاور» (torque motor) نوع خاصی از موتور القایی است که قادر است تا مدت نامحدود در حالت روتور قفل بدون آسیب بماند. در این حالت، این موتور، گشتاور ثابتی را به بار اعمال میکند (وجه تسمیه نام گذاری آن). یک کاربرد موتور گشتاور، موتورهای قرقره عرضه و برداشت در یک درایو نوار است.
موتورهای پلهای
نوع دیگری از موتورهای الکتریکی «موتور پلهای» (stepper motor) نامیده میشود، که در آن یک روتور درونی، شامل آهنرباهای دائمی یا هستهی بزرگ آهنی با «قطبهای برجسته» (salient poles) که توسط دستهای از آهنرباهای خارجی با کنترل الکترونیکی روشن و خاموش میگردند، کنترل میشود. یک موتور پلهای ترکیبی از یک موتور الکتریکی DC و یک سلونوئید است. همان طور که هر کویل مغناطیس میشود، جهت روتور خود را با جهت میدان مغناطیسی تولید شده توسط سیم پیچ منطبق میکند. بسته به توالی مغناطیس شدن، روتور ممکن است ساعت گرد یا پادساعت گرد بچرخد. موتورهای پلهای ساده توسط بخشی از یک سیستم دندهای در پلههای معینی قرار میگیرند، اما موتورهای پلهای کنترل شده، میتوانند بسیار آرام بچرخند. موتورهای پلهای کنترل شده با رایانه یکی از فرمهای سیستمهای تنظیم موقعیت است، به ویژه وقتی که بخشی از یک سیستم دیجیتال دارای کنترل فرمان بار باشند. در شکل زیر عملکرد موتور پلهای نشان داده شده است.

موتور مغناطیس دائم
یک «موتور الکتریکی مغناطیسی دائم» (permanent magnet motor) همانند موتور DC معمولی است به جز این که سیم پیچی میدان توسط آهنرباهای دائمی جایگزین میشود. با انجام این کار، موتور مانند یک موتور DC تحریک ثابت (موتور DC تحریک جداگانه) عمل میکند. این موتورها معمولا از توانهای کوچک تا چند اسب بخار دیده میشوند. این تجهیزات در لوازم خانگی کوچک، «باتری» (battery) وسایل نقلیه، برای اهداف پزشکی، در سایر تجهیزات پزشکی مانند دستگاههای اشعه ایکس کاربرد دارند. این موتورها همچنین در اسباب بازیها و در خودروها به عنوان موتورهای کمکی برای تنظیم صندلی، پنجرههای برقی، «سقف متحرک» (sunroof)، تنظیم آینه، موتورهای دمنده، فنهای خنک کننده «موتور احتراق داخلی» (engine) و مانند این موارد استفاده میشود.
آخرین تحولات «موتور سنکرون مغناطیس دائم» (PSM; Permanent magnet Synchronous Motor) برای وسایل نقلیه الکتریکی است. این موتور دارای ویژگیهای بازده بالا، حداقل زمان قفل کردن و جابجایی سطح گشتاور، نیاز به فضای کم، ابعاد «فشرده» (compact) و وزن کم است.
موتورهای DC بدون جاروبک
بسیاری از محدودیتهای موتور الکتریکی DC کلاسیک کموتاتوری به دلیل نیاز به جاروبک است. جاروبکها باید با فشار به کموتاتور متصل باشند که باعث ایجاد اصطکاک میشود. همچنین در سرعتهای بالاتر، جاروبکها در برقراری تماس با کموتاتور با مشکل مواجه هستند و ممکن است در اثر صاف نبودن سطح کموتاتور ایجاد «جرقه» (spark) کنند که این اتفاق حداکثر سرعت موتور را محدود میکند. علاوه بر این چگالی جریان بر واحد سطح جاروبکها خروجی موتور را محدود میکند. تماس الکتریکی ناقص نیز باعث ایجاد «نویز الکتریکی» (electrical noise) میشود. جاروبکها در نهایت مستهلک میشوند و نیاز به جایگزینی دارند و کموتاتور نیز در معرض فرسودگی و تعمیر و نگه داری قرار میگیرد. مونتاژ کموتاتور در یک ماشین بزرگ یک عامل پر هزینه است که نیاز به مونتاژ دقیق بسیاری از قطعات دارد.

این مشکلات در «موتورهای DC بدون جاروبک» (Brushless DC motors) حذف میشوند. در این موتور، «سوییچ چرخان» (rotating switch) یا مجموعهی جاروبکها و کموتاتور با یک سوییچ الکترونیکی خارجی سنکرون (همگام) با موقعیت روتور جایگزین شده است. موتورهای بدون جاروبک معمولا بازدهی بین ۸۵٪-۹۰٪ دارند در حالی که موتورهای DC با جاروبک معمولا بازده ۷۵٪-۸۰٪ از خود نشان میدهند. موتور DC بدون جاروبک تا حدودی شبیه موتور DC معمولی و از لحاظ شکل بسیار شبیه به موتورهای پلهای است. برای این که در این موتور همانند موتور پلهای اغلب از روتور بیرونی مغناطیس دائم، کویلهای سه فاز، یک یا چند سنسور «اثر هال» (Hall effect) برای تشخیص موقعیت روتور و درایو الکترونیکی استفاده میشود. یک کلاس خاص کنترلرهای موتور DC بدون جاروبک از «فیدبک یا پسخورد» (feedback) از طریق اتصالات فاز اصلی به جای سنسورهای اثر هال برای مشخص کردن موقعیت و سرعت روتور استفاده میکند. این موتورها به طور گسترده در وسایل نقلیه با کنترل رادیویی الکتریکی استفاده میشوند و به عنوان مدلهای موتورهای پیشرو به حساب می آیند (از آنجا که آهن ربا در قسمت خارجی است).
اثر هال این گونه بیان میکند که اگر جریانی (I) از یک بلور رسانا در جهت عمود بر میدان مغناطیسی یکنواخت (H) اعمالشده عبور کند، رسانا دارای اختلاف پتانسیل (ΔV) میان رخهای عمود بر جهت جریان و میدان مغناطیسی خواهد شد. این پدیده به افتخار کاشف آن ادوین هال نامگذاری شده است. همچنین او به این نکته پی برد که میزان ولتاژ به اندازه جریان عبوری از رسانا و چگالی شار مغناطیسی عمود بر آن بستگی دارد. اندازهی این ولتاژ در محدودهی میکرو ولت است. به همین خاطر در کاربردهای عملی حضور تقویت کنندهها ضروری است. سنسورهای (حسگرهای) اثر هال در بسیاری از ابزار اندازهگیری استفاده میشوند. در شرایطی که متغیر حس شونده میدان مغناطیسی تولید کند یا آن را از خود عبور دهد سنسورهای اثر هال به خوبی وظیفه خود را انجام میدهند.
موتورهای DC بدون جاروبک معمولا در جایی که کنترل سرعت دقیق لازم است مانند درایوهای دیسک کامپیوتر، ضبط کنندههای کاست ویدئویی، درایوهای CD و CD-ROM، فنها، پرینترهای لیزری، فتوکپیها و... این نوع موتور الکتریکی مزایای متعددی نسبت به موتورهای معمولی دارد که میتوان به این موارد اشاره کرد: در مقایسه با فنهای AC با استفاده از موتورهای قطب چاک دار، بسیار کارآمد هستند. در حال اجرا خیلی خنکتر از موتورهای AC معادل هستند و منجر به افزایش عمر یاتاقانهای فن میشوند.

عمر یک موتور DC بدون جاروبک به طور قابل توجهی طولانیتر از یک موتور DC با استفاده از جاروبکها و کموتاتور است. «کموتاسیون» (commutation) نیز منجر به ایجاد مقدار زیادی نویز RF و الکتریکی میشود. بنابراین یک موتور بدون جاروبکها و کموتاتور میتواند در تجهیزات حساس الکتریکی مانند تجهیزات صوتی و کامپیوتری استفاده شود.
موتورهای بدون جاروبک با استفاده از سنسورهای اثر هال میتوانند سیگنال «تاکومتر یا دورسنج» (tachometer) برای «کنترل حلقه بسته» (closed-loop control) سرعت روتور ارائه دهند. سیستم کنترل حلقه بسته (closed-loop control system) سیستمی است که در آن سیگنال خروجی بر عمل کنترل اثر مستقیم دارد . سیستمهای کنترل حلقه بسته، سیستمهای کنترل پسخوردی (دارای فیدبک) هستند. سیگنال خطای کارانداز که تفاضل بین سیگنال ورودی و سیگنال پسخورد است، به کنترل کننده اعمال میشود تا خطا را کاهش دهد و خروجی سیستم را به مقدار مطلوب برساند . اصطلاح "حلقه بسته" بر استفاده از عمل پسخوردی برای کاهش خطای سیستم دلالت دارد. این موتور میتواند به راحتی با یک ساعت داخلی یا خارجی هماهنگ شود، که منجر به کنترل دقیق سرعت میگردد.
موتورهای بدون جاروبک برخلاف موتورهای با جاروبک بدون ایجاد جرقه کار میکنند که آنها را برای محیطهای دارای سوختها و مواد شیمیایی فرار مناسب میکند. موتورهای DC بدون جاروبک جدید از توان کسری از وات تا چند کیلو وات ساخته میشوند. بزرگترین موتورهای بدون جاروبک تا حدود ۱۰۰ کیلو وات هستند که در خودروهای الکتریکی استفاده میشوند. این نوع موتورها همچنین استفاده قابل توجهی در هواپیمای مدل با کارایی بالا دارند.
موتورهای DC بدون هسته
در واقع گشتاور تنها بر سیم پیچ الکترومغناطیسی روتور و نه بر هستهی آهنی آن اعمال میشود. با استفاده از این واقعیت «موتورهای DC بدون هسته»(Coreless DC motors) ساخته میشود که شکل خاصی از موتور DC دارای جاروبک است. این موتورها برای شتاب سریع بهینه شدهاند و روتوری دارند که بدون هستهی آهنی ساخته شده است. روتور میتواند به شکل یک سیلندر پر از سیم پیچ در داخل مغناطیس استاتور، یک سبد اطراف مغناطیس استاتور یا یک پنکیک صاف (برد مدار چاپی) بین مغناطیس بالا و پایین استاتور اجرا شود. سیم پیچها معمولا با «رزینهای اپوکسی» (epoxy resine) آغشته و تثبیت میشوند.
از آنجا که این روتور وزن بسیار سبکتری از یک روتور معمولی دارد که از سیم پیچهای مسی روی ورقهای فولادی تشکیل شده است، این روتور میتواند بسیار سریعتر شتاب گیرد و اغلب به ثابت زمانی مکانیکی کمتر از 1 میلی ثانیه برسد. این موضوع به خصوص در صورتی اتفاق میافتد که سیم پیچها از جنس آلومینیوم باشند و نه مس که سنگینتر است. اما چون هیچ جرم فلزی در روتور وجود ندارد که به عنوان «جاذب گرما» (heat sink) عمل کند، حتی موتورهای کوچک بدون هسته باید اغلب توسط فن خنک شوند. این موتورها معمولا برای چرخ تسمهی درایوهای نوار مغناطیسی و سیستمهای کنترل سروو با کارایی بالا استفاده میگردند.
موتورهای خطی
یک «موتور خطی» (linear motor) اساسا یک موتور الکتریکی است که از حالت دوار درآمده تا به جای این که یک گشتاور چرخشی تولید کند، یک نیروی خطی توسط ایجاد یک میدان الکترومغناطیسی سیار در امتداد طول آن، به وجود آورد.
موتورهای خطی اغلب موتورهای القایی یا پلهای هستند. یک موتور خطی در یک قطار سریعالسیر «مگلو یا حمل و نقل شناور مغناطیسی» (maglev; Magnetic levitation transport) استفاده میشود که در آن قطار بالای سطح زمین پرواز میکند.
موتورهای الکتریکی تغذیه دو سویه
«موتورهای الکتریکی تغذیه دو سویه» (Doubly-fed electric motors) یا ماشینهای الکتریکی تغذیه دو سویه، ماشینهای الکتریکیای هستند که در آنها سیم پیچ استاتور و سیم پیچ روتور هردو به صورت جداگانه به تجهیزاتی خارج از ماشین الکتریکی متصل شدهاند. در این ماشینها تغذیه AC با فرکانس قابل تنظیم ،به ماشین الکتریکی اجازهی چرخش با سرعت متغیر را میدهد. از این فناوری در ژنراتورهای به کار رفته در توربینهای بادی استفاده میشود. آنها انعطاف پذیر اند و تغییرات سرعت تأثیری روی فرکانس برق تولیدی توسط ژنراتور ندارد. این ژنراتورها برای توربینهای بادی که بسته به سرعت باد سرعتشان متغیر است، برای مثال وقتی توربین در معرض یک باد تند قرار میگیرد مناسب اند.
راه حل دیگر استفاده از ژنراتورهای تغذیه دوسویهای است که در آنها به جای حالت معمول که در آن سیمپیچ روتور به منبع تغذیه DC متصل و سیمپیچ استاتور که برق تولید شده از خروجی آن گرفته میشود، دو سیمپیچ سه فاز موجود است که یکی ثابت است و دیگری دوران میکند. یکی از سیم پیچها مستقیماً به خروجی متصل میشود و سیم پیچ دیگر به یک منبع AC سه فاز با فرکانس متغیر متصل میشود و این منبع روی فرکانسی قرار میگیرد که تغییرات در سرعت ژنراتور و طبعاً فرکانس برق تولیدی رو جبران میکند. برای تنظیم فرکانس این منبع به یک مبدل AC به DC و یک مبدل DC به AC نیاز است که برای ساخت آن از نیمه هادیهای IGBT استفاده شده است. این مبدلها دو طرفه اند و میتوانند برق را از هر دو جهت عبور دهند.
ماشینهای الکتریکی تغذیه دو سویهی روتور سیم پیچی شده، ماشین الکتریکی تغذیه دو سویهی روتور سیم پیچی شدهی بدون جاروبک و ماشینهای الکتریکی تغذیه دو سویهی بدون جاروبک تنها نمونههایی از ماشینهای الکتریکی تغذیه دو سویهی سنکرون هستند.
موتور با دو پورت مکانیکی
«موتورهای الکتریکی با دو پورت مکانیکی» (Dual Mechanical Port Electric Motors) یا موتورهای الکتریکی DMP یک مفهوم جدید از موتور الکتریکی محسوب میشود. به طور دقیق موتورهای الکتریکی DMP در واقع شامل دو موتور الکتریکی (یا ژنراتور) اند که در یک پکیج به کار گرفته شدهاند. هر موتور بر اساس اصول موتور الکتریکی سنتی عمل میکند. پورتهای الکتریکی به وسیلهی عناصر الکترونیکی به هم گره میخورند و تبدیل به یک پورت الکتریکی میشوند در حالی که هر دو پورت مکانیکی (شافتها) در خارج از پکیج در دسترس هستند. از لحاظ نظری، با ادغام فیزیکی دو موتور به یک پکیج انتظار میرود استفادهی مؤثر از چگالی توان افزایش یابد.
نانو موتور نانو لوله
محققان دانشگاه کالیفرنیا، برکلی، بر اساس نانو لولههای کربنی چند منظوره، یاتاقانهای چرخشی و در نتیجه «نانو موتور نانو لوله» (Nanotube nanomotor) تولید کردهاند. با پیوست یک ورق طلای (با ابعاد سفارشی 100 نانو متر) به پوسته بیرونی یک نانو لوله کربنی چند منظورهی معلق (مانند سیلندرهای کربنی تو در تو)، این موتورها قادر به چرخش الکترواستاتیکی پوسته بیرونی نسبت به هسته داخلی هستند. این یاتاقانها بسیار قدرتمند هستند به طوری که هزاران بار نوسان داشته و هیچ نشانهای از سایش ندارند. این کار در محل SEM انجام شد. این سیستمهای نانو الکترو مکانیکی (NEMS;nanoelectromechanical systems) گام بعدی در کوچک سازی هستند که ممکن است در آینده به جنبههای تجاری تبدیل شود.

اگر به یادگیری در این زمینه علاقه دارید، آموزشهای زیر نیز به شما پیشنهاد میشوند:
- مجموعه دروس مهندسی برق
- مجموعه آموزشهای مهندسی برق قدرت
- یخچال چگونه کار میکند؟
- انواع ژنراتورهای DC — از صفر تا صد
- اجزای ژنراتور DC — به زبان ساده
- کنترل سرعت موتورهای DC — از صفر تا صد
^^








سلام ایا در مورد عکس العمل ارمیچر اموزش دارید ممنون میشم راهنمایی کنید
با سلام خدمت شما همراه گرامی؛
در این زمینه میتوانید فیلم آموزش رایگان «آرمیچر چیست و چگونه کار می کند؟ + انواع و کاربردها» از مجموعه فرادرس را مشاهده کنید.
از بازخورد و همراهی شما با مجله فرادرس سپاسگزاریم.
با عرض سلام
من ميخواهم كه از يك الكتروموتور با قدرت ٥ اسب بخار برق دريافت كنم يعنى به زبانى بعنوان ژنراتور استفاده كنم آيا اين امكان پذير است و در پيوست تصوير تابلو راهنماى آن را نيز پيوست ميكنم و استدعا ميكنم چنانچه ممكن است با ايميل جوابم را لطف كنيد
با كمال سپاس