



مثال هایی برای آشنایی با مدولاسیون پهنای پالس
روشهای مختلفی برای کنترل سرعت موتورهای DC استفاده میشود که یکی از سادهترین و پرکاربردترین این روشها «مدولاسیون پهنای پالس» یا Pulse Width Modulation) PWM) است.


قبل از پرداختن به جزئیات مدولاسیون پهنای پالس، ابتدا لازم است با نحوهی کار موتورهای DC آشنا شویم.
در کنار استپر موتورها، موتورهای DC آهنربای دائم یا Permanent Magnet DC Motor) PMDC) نیز از پرکاربردترین موتورهای جریان مستقیم هستند که برای تولید سرعت زاویهای پیوسته و قابل کنترل به کار میروند. موتورهای DC کوچک برای استفاده در جاهایی که کنترل سرعت اهمیت دارد، بسیار مفیدند. به عنوان مثال در اسباب بازیهای کوچک، رباتها و سایر مدارهای الکترونیکی از موتورهای DC به شدت استفاده میشود.
یک موتور DC از دو بخش تشکیل شده است، قسمت ساکن که «استاتور» (Stator) نام داشته و قسمت دوار که «روتور» (Rotor) نامیده میشود. روتور در داخل استاتور قرار گرفته و حرکت جنبشی را تولید میکند. در موتورهای DC معمولاً به روتور، «آرمیچر» (Armature) نیز میگویند.
عموماً استاتور موتورهای DC کوچک، از دو آهنربای دائمی ثابت ساخته میشود که یک شار مغناطیسی یکنواخت و ثابت در درون موتور تولید میکنند. به همین خاطر به چنین موتورهایی، موتورهای DC جریان مستقیم آهنربای دائم یا permanent-magnet direct-current) PMDC) گفته میشود.
آرمیچر موتورها از چند سیمپیچ الکتریکی که به صورت حلقوی به دور یک هستهی فلزی پیچیده شدهاند، تشکیل شده است. این نوع چینش سیمپیچها باعث ایجاد قطبهای North و South میشود.
جریان عبوری از سیمپیچهای روتور میدان الکترومغناطیسی لازم را تولید میکند. میدان مغناطیسی چرخشی تولید شده توسط سیمپیچهای آرمیچر، دو قطب N و S را در اطراف آرمیچر ایجاد میکند. آهنرباهای دائمی استاتور قطبهای ایجاد شده را جذب یا دفع میکنند که این کار باعث ایجاد یک حرکت دورانی حول محور مرکزی موتور میشود. شکل زیر این موضوع را بهتر نشان میدهد.
موتور آهنربای دائم دو قطبی
با چرخش آرمیچر جریان الکتریکی از ترمینالهای موتور عبور کرده و از طریق جاروبکهای کربنی که در اطراف «کموتاتور» (commutator) قرار گرفتهاند، به دستهی دیگری از سیمپیچهای آرمیچر وارد میشود. این فرآیند میدان مغناطیسی دیگری تولید میکند و هر دفعه با چرخش آرمیچر، دستهی جدیدی از سیمپیچهای آرمیچر دارای انرژی گشته و آرمیچر را وادار به چرخش بیشتر میکنند.
لذا سرعت زاویهای موتورهای DC به فعل و انفعال میان دو میدان مغناطیسی وابسته است. یکی از این میدانها توسط آهنرباهای دائمی و ثابت استاتور و میدان دیگر نیز توسط آهنرباهای موقت و دوار روتور ایجاد میشود. با کنترل این فعل و انفعال میتوانیم سرعت موتور را کنترل کنیم.
میدان مغناطیسی تولید شده توسط آهنرباهای دائمی استاتور ثابت بوده و نمیتوان آن را تغییر داد؛ اما اگر از طریق کنترل جریان عبوری از سیمپیچها شدت میدان الکترومغناطیسی آرمیچر را تغییر دهیم، شار مغناطیسی تولید شده نیز تغییر یافته و در نتیجه اثر متقابل میان دو میدان قویتر یا ضعیفتر گشته و سرعت سریعتر یا کندتری خواهیم داشت.
با این تفاسیر، سرعت زاویهای موتور N) DC) با مقدار «نیروی محرکه القایی بازگشتی» (back emf) یا Vb تقسیم بر شار مغناطیسی ضرب در یک ثابت الکترومغناطیسی (Ke) متناسب است. مقدار این ثابت الکترومغناطیسی به ماهیت سیمپیچهای آرمیچر وابسته است. معادلهی زیر موارد گفته شده را بهتر نشان میدهد:
N ∝ V/KeΦ
اما چگونه باید عبور جریان از موتور را کنترل کنیم؟ بسیاری از مواقع برای کنترل سرعت موتورهای DC از یک مقاومت متغیر بزرگ یا «رئوستا» (Rheostat) به صورت سری با موتور استفاده میشود.
چنین روشی در برخی از ماشینهای مسابقهای اسباببازی کاربرد دارد. اما از آنجایی که در این روش توان اتلافی و گرمای تولید شده بسیار بالاست، استفاده از آن چندان به صرفه نیست. لذا میخواهیم به تشریح یک روش ساده و آسان دیگر برای کنترل سرعت موتورها بپردازیم. در این روش با استفاده از «مدولاسیون پهنای پالس» یا PWM ولتاژ قرار گرفته در دو سر موتور تنظیم میشود.
همانگونه که از نام آن پیداست، در مدولاسیون پهنای پالس موتور با استفاده از یک سری پالس ON-OFF و تغییر دوره کاری یا «دیوتی سایکل» (duty cycle) راهاندازی میشود. دیوتی سایکل نسبت زمان ON بودن ولتاژ خروجی به کل زمان یک دورهی تناوب است که به صورت درصد بیان میشود.
توان اعمالی به موتور را میتوان با تغییر پهنای پالسهای اعمال شده کنترل کرد. با تغییر پهنای پالس، میانگین ولتاژ DC اعمال شده به ترمینالهای موتور نیز تغییر میکند. با تغییر یا مدوله کردن زمانبندی این پالسها، سرعت موتور را میتوان کنترل کرد؛ یعنی هرچه زمان ON بودن پالس بیشتر باشد، سرعت موتور نیز بیشتر خواهد بود و برعکس آن هرچه زمان ON بودن پالس کمتر باشد، سرعت موتور نیز کمتر خواهد بود.
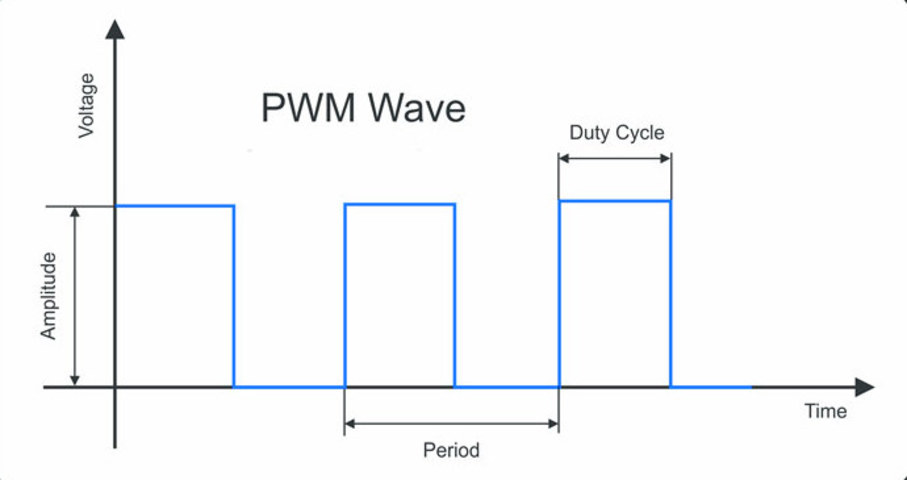
به عبارت بهتر هرچه پهنای پالس بیشتر شود، میانگین ولتاژ اعمالی به ترمینالهای موتور نیز بیشتر گشته و شار مغناطیسی درون سیمپیچهای آرمیچر نیز قویتر خواهد شد و در نهایت موتور سریعتر خواهد چرخید. شکل موج زیر این موضوع را بهتر نشان میدهد.
شکل موج پهنای پالس مدوله شده
مزیت استفاده از مدولاسیون پهنای پالس نسبت به سایر روشها، کم بودن توان اتلافی ترانزیستور سوئیچینگ است. در این روش ترانزیستور یا کاملاً ON و یا کاملاً OFF است و در نتیجه اتلاف توان بسیار کمتری خواهد داشت. این موضوع باعث خطی بودن کنترل سرعت و پایداری بیشتر میشود.

از طرف دیگر دامنهی ولتاژ موتور نیز ثابت باقی مانده و همواره موتور در قدرت کامل کار میکند. لذا میتوان بدون متوقف کردن موتور، در سرعتهای بسیار کمتری آن را راهاندازی کرد. برای تولید سیگنال PWM از یک مدار «اسیلاتور 555 آستابل» همانند شکل زیر استفاده میشود.
مدار سادهی بالا را میتوان با استفاده از تایمر بسیار معروف NE555 یا 7555 ساخت. از این مدار برای تولید سیگنال مدولاسیون پهنای پالس در یک فرکانس خروجی ثابت استفاده میشود. خازن تایمینگ C به وسیلهی جریان عبوری از مقاومتهای تایمینگ RA و RB شارژ و دشارژ میشود.
مقدار سیگنال خروجی که در پایهی شماره 3 آیسی 555 قرار میگیرد با ولتاژ تغذیهای که ترانزیستورها را کاملاً ON میکند برابر است. مدت زمانی که طول میکشد تا خازن C شارژ و دشارژ شود به مقدار مقاومتهای RA و RB وابسته است.
شارژ شدن خازن از طریق شبکهی مقاومتی RA انجام میگیرد. به محض اینکه خازن شارژ شود، از طریق شبکهی مقاومتی RB و دیود D2 بر روی پایهی شماره 7 دشارژ میشود. در طول فرآیند دشارژ خازن، مقدار خروجی (پایهی 3) 0 ولت بوده و ترانزیستور OFF است.
مدت زمانی که طول میکشد تا خازن یک چرخهی کامل شارژ و دشارژ را طی کند به مقدار RA ،RB و C وابسته است.
- TH مدت زمانی است که خروجی ON است. این مقدار برابر است با: TH = 0.693(RA).C
- TL مدت زمانی است که خروجی OFF است. این مقدار برابر است با: TL = 0.693(RB).C
- دورهی تناوب کلی برابر است با T = TH + TL و فرکانس خروجی نیز برابر است با: ƒ = 1/T
در شکل بالا مقدار قطعات مشخص شده است. با استفاده از تغذیهی 6.0 ولتی، میتوان دیوتی سایکل شکل موج را بین 8.3% (0.5V) تا حدود 91.7% (5.5V) تنظیم کرد. فرکانس آستابل ثابت بوده و در حدود 256Hz میباشد، در نتیجه موتور با این سرعت ON و OFF میشود.
مقاومت R1 به علاوهی قسمت بالایی پتانسیومتر (VR1)، نمایانگر شبکهی مقاومتی RA هستند؛ از طرف دیگر قسمت پایینی پتانسیومتر به علاوهی R2 نشان دهندهی شبکهی مقاومتی RB هستند.
با توجه به کاربردها و موتورهای DC مختلف، این مقادیر نیز تغییر میکنند. البته تا زمانی که مدار آستابل 555 به اندازهی کافی سریع عمل کند، موتور نیز به خوبی کار خواهد کرد.
دیود D3 به عنوان «دیود هرزگرد» (flywheel diode) برای محافظت مدار الکترونیکی در برابر بار سلفی موتور به کار میرود. در بارهای سلفی، اگر جریان بار بهطور ناگهانی کاهش یابد یا قطع شود، ولتاژ القایی معکوس و شدیدی در دو سر بار به وجود میآید که موجب آسیب دیدن سایر المانهای مدار میشود. برای تخلیه کردن این ولتاژ و جلوگیری از آسیب دیدن مدار، معمولاً یک دیود به صورت موازی با بار قرار میگیرد که به آن، دیود هرزگرد گفته میشود. همچنین اگر بار موتور بسیار زیاد باشد، برای خنک کردن ترانزیستور سوئیچینگ یا MOSFET، بر روی آن «هیتسینک» (heatsink) گذاشته میشود.
مدولاسیون پهنای پالس روش بسیار مفیدی برای کنترل توان اعمالی به یک بار بدون وجود توان اتلافی است. مدار بالا را میتوان برای کنترل سرعت یک فن یا لامپها و LED های DC به کار برد. به طور کلی در مدارهای الکتریکی اکثر مواقع برای کنترل پارامترها از مدولاسیون پهنای پالس استفاده میشود.
امیدواریم این مقاله مورد توجه شما قرار گرفته باشد. اگر به یادگیری بیشتر در این زمینه علاقهمند هستید، مطالب زیر را به شما پیشنهاد میکنیم:
- مجموعه آموزش های مهندسی برق
- مجموعه آموزش های مهندسی برق – قدرت
- مجموعه آموزش های نرم افزارهای برق و الکترونیک
^^








با تشکر فراوان از مسئولان و مدرسان این سایت
در فرمول های فوق مثلا برای محاسبه TH در حالت حداقل مقدار پتانسیومتر در مدار فوق داریم: 0.693*10000=6930 واحد این عدد چی است؟ اگرثانیه است عدد خیلی بزرگ است و خلاصه یک جای کار اشکال دارد. البته وقتی دیوتی سایکل را با استفاده از TH و TL حساب می کنیم جواب درست بدست می آید.
سلام.
در فرمولهایی که به آنها اشاره کردهاید، مقدار ظرفیت خازنِ C نیز وجود دارد که باید در سایر اعداد ضرب شود.
سالم و موفق باشید.
سلام بنده میخواستم بدانم برای خمیر پهن کن ازچه موتور dc باید استفاده کنم تحمل بار ۲۰ کیلوگرم