کنترل پیش بین در الکترونیک قدرت — از صفر تا صد
در آموزشهای قبلی مجله فرادرس، با کنترل پیشبین مدل و مفاهیم مربوط به آن آشنا شدیم. در این آموزش، درباره کنترل پیش بین در الکترونیک قدرت بحث خواهیم کرد و به نوع خاصی از کنترل پیشبین خواهیم پرداخت که اغلب در الکترونیک قدرت کاربرد دارد. این روش، کنترل پیشبین مدل با مجموعه ورودی متناهی (Finite Control Set Model Predictive Control) یا FCS-MPC نام دارد که در ادامه با آن آشنا خواهیم شد.
کنترل مبدلهای الکترونیک قدرت
تاکنون روشهای متعددی برای کنترل مبدلهای الکترونیک قدرت ارائه شده که شکل 1 رایجترین آنها را نشان میدهد.

در میان این کنترلکنندهها، کنترل هیسترزیس و خطی به مدولاسیون پهنای پالس (PWM) وابسته هستند. کنترل هیسترزیس با استفاده از ماهیت غیرخطی مبدلهای الکترونیک قدرت، نحوه کلیدزنی را بر اساس مقایسه متغیر اندازهگیری شده با مرجع آن و با توجه به عرض هیسترزیس داده شده برای خطا تعیین میکند. از این نوع کنترلکننده میتوان در کاربردهای ساده مانند کنترل جریان و همچنین کاربردهای پیچیدهتر مانند کنترل مستقیم توان (Direct Power Control) یا DPC استفاده کرد. این کنترلکننده آنالوگ است و برای پیادهسازی آن در یک بستر دیجیتال، فرکانس نمونهبرداری بسیار بالایی مورد نیاز است.

با توجه به امکان مدولاسیون، میتوان از هر کنترلکننده خطی برای مبدلهای قدرت استفاده کرد. کنترلکننده تناسبی-انتگرالی (PI) از شناخته شدهترین و متداولترین این کنترلکنندهها است. طراحی کنترل خطی با مدولاسیون، اغلب مستلزم تبدیلات خاصی به فضای مدل میانگین است. علاوه بر این، اعمال کنترل خطی به یک سیستم غیرخطی شاید نتواند در سراسر محدوده دینامیکی کارایی مناسبی در پی داشته باشد. با این اوصاف، وجود یک مرحله مدولاسیون اضافه، چند مرحله طراحی و ملاحظات برای رسیدن به یک طرح کنترل مناسب، میتواند برای برخی از مبدلهای قدرت مانند مبدلهای ماتریسی (Matrix Converters)، مبدلهای چندسطحی (Multilevel Converters) و غیره بسیار چالشبرانگیز باشد. علاوه بر این، در طراحی کنترل خطی، نمیتوان به طور مستقیم محدودیتهای سیستم و الزامات فنی (مانند THD، حداکثر جریان، حداکثر فرکانس کلیدزنی و غیره) را در سیستمهای الکترونیک قدرت گنجاند.
با توسعه ریزپردازندههای قویتر، روشهای کنترلی جدیدتری برای غلبه بر مشکلات قبلی ارائه شده که برخی از مهمترین آنها عبارتند از: کنترلکنندههایی که بر اساس منطق فازی و یا شبکههای عصبی هستند، کنترل حالت لغزشی و کنترل پیشبین.
استفاده از منطق فازی و شبکههای عصبی برای کاربردهایی که در آن، سیستم کنترل و یا برخی از پارامترهای آن ناشناخته باشد مناسب است. کنترل حالت لغزشی قوام مناسبی دارد و به خوبی از ماهیت کلیدزنی مبدلها برای طراحی کنترلکننده استفاده میکند، اما پیچیدگی این کنترلکننده از نقاط چالشبرانگیز آن است.
در بین روشهای کنترلی جدید، کنترل پیشبین گزینه بسیار جذاب و مناسبی برای مبدلهای قدرت است. کنترل پیشبین، خانواده گستردهای از کنترلکنندهها را با رویکردهای متفاوت در بر میگیرد. ایده مشترک همه این کنترلکنندهها عبارت است از استفاده از مدل سیستم برای محاسبه پیشبینی رفتار آینده متغیرهای کنترل شده و استفاده از یک معیار بهینهسازی برای انتخاب عملگر مناسب. در بخش بعدی مفاهیم و نحوه عملکرد این کنترلکننده را بیان میکنیم.
کنترل پیش بین در الکترونیک قدرت
همانگونه که گفته شد در بین روشهای کنترلی جدید برای مبدلهای الکترونیک قدرت، کنترل پیشبین با استقبال بسیار خوبی مواجه شده است. زیرا از یک سو با توجه به ویژگیهای این روش، محدودیتهایی چون چندمتغیره بودن سیستم، رفتار غیرخطی آن و وجود قیود مختلف، مشکلساز نخواهد بود و از سوی دیگر با پیشرفت علم الکترونیک و روی کار آمدن پردازندههای قوی، دیگر نباید انجام محاسبات فراوان را در این روش مشکلی جدی قلمداد کرد.

مبدلهای قدرت سیستمهایی هستند که طبیعتی ترکیبی (گسسته و پیوسته) دارند و وجود بخشهای خطی و غیرخطی در آنها و نیز تعداد متناهی وضعیتهای کلیدزنی به عنوان ورودی کنترلی سیستم، کنترل آنها را با چالش مواجه کرده است. همچنین وجود قیدها و محدودیتهایی چون حداکثر ولتاژ و جریان خروجی در این مبدلها امری اجتنابناپذیر است. شکل 2 ویژگیهای مبدلهای الکترونیک قدرت و تناسب آنها را با مشخصات کنترل پیشبین نشان میدهد.

کنترل پیشبین به یک الگوریتم خاص محدود نبوده و خانواده بزرگی از کنترلکنندهها را شامل میشود. از انواع کنترلکنندههای پیشبین موجود برای کنترل مبدلهای الکترونیک قدرت میتوان به کنترل ناحیه مرده (Deadbeat Control)، کنترل پیشبین مبتنی بر هیسترزیس (Hysteresis-based Predictive Control) و کنترل پیشبین مدل (Model Predictive Control) یا MPC اشاره کرد.
یکی از شناخته شدهترین طرحهای کنترل پیشبین، کنترل ناحیه مرده است که با استفاده از مدل سیستم، ولتاژی را که باعث میشود خطا در یک زمان نمونهبرداری صفر شود محاسبه کرده و سپس با استفاده از یک مدولاتور به سیستم اعمال میکند. این روش هنگامی که یک پاسخ دینامیکی سریع مورد نیاز است، اغلب با شکست مواجه میشود. در واقع، خطا در مقادیر پارامترهای مدل، تأخیرِ مدلنشده و خطاهای دیگر در مدل، عملکرد سیستم را با مشکل مواجه میسازد و حتی ممکن است منجر به ناپایداری شود. نقطه ضعف دیگر این طرح کنترلی آن است که ویژگیهای غیرخطی و محدودیتهای متغیرهای سیستم را نمیتواند به خوبی کنترل کند.
اساس کار کنترل پیشبین مبتنی بر هیسترزیس، نگه داشتن متغیرهای سیستم بین مرزهای یک ناحیه یا فضای هیسترزیس است. فرکانس کلیدزنی در این کنترلکننده متغیر است.
کنترل پیشبین مدل از استراتژیهای بسیار قدرتمند است که به تازگی در الکترونیک قدرت استفاده شده است. در بخش بعدی مختصری درباره MPC توضیح خواهیم داد.
ایده اصلی کنترل پیشبین مدل یا کنترل افق پیشرو (Receding Horizon Control) یا RHC در دهه 1960 معرفی شد و پس از آن در دهه 1970 در کابردهای کنترل صنعتی و به ویژه در صنایع شیمیایی مورد توجه و استفاده قرار گرفت. سپس این رویکرد کنترلی وارد فضای دانشگاهی و تحقیقاتی گردید و با استقبال محققان مواجه شد. مراجع مختلف، انواع کنترلکنندههای پیشبین را به خوبی شرح داده و مقایسه کردهاند. در کاربردهای الکترونیک قدرت، MPC را میتوان در دو دسته تقسیمبندی کرد: کنترل پیشبین مدل با مجموعه ورودی پیوسته (Continues Control Set Model Predictive Control) یا CCS-MPC و کنترل پیشبین مدل با مجموعه ورودی متناهی (Finite Control Set Model Predictive Control) یا FCS-MPC.
تفاوت عمده این دو کنترلکننده را میتوان در نوع مدلسازی، پیادهسازی و البته پیچیدگی آنها دانست. کنترل پیشبین مدل با مجموعه ورودی پیوسته، در بستر مدل میانگین در فضای حالت برای مبدل الکترونیک قدرت تعریف میشود. بر این اساس، ورودی در مدل، یک پارامتر پیوسته خواهد شد که در یک بازه محدود است. همچنین فرکانس کلیدزنی ثابت بوده و استراتژی کنترلی از طریق یک مدولاتور به سیستم اعمال خواهد شد. این نوع کنترل پیشبین معمولاً برای سایر سیستمها نیز به کار میرود و خاص سیستمهای الکترونیک قدرت نیست. با استفاده از مدلسازی هایبرید نیز ورودی پیوسته و محدود خواهد شد و برای پیادهسازی کنترلکننده فرکانس کلیدزنی ثابت است.
کنترل پیشبین مدل با مجموعه ورودی متناهی، از طبیعت گسسته مبدلهای الکترونیک قدرت به منظور کاهش محاسبات و زمان پردازش اطلاعات استفاده میکند. همانطور که میدانیم، در یک مبدل، کلیدها فقط میتوانند در دو وضعیت قطع و وصل باشند و ترکیب آنها نیز تعداد محدودی از وضعیتهای مختلف را ایجاد میکند. با استفاده از این ویژگی ذاتی، میتوان مدل کلیدزنی مبدل را به سادگی ارائه کرد و پیشبینی را تنها به وضعیتهای محدود مذکور خلاصه نمود. عناصر اصلی این طرح کنترلی، مدل ریاضی سیستم و تابع هزینه از پیش تعریف شده است.
در بخش بعدی، مفاهیم اساسی مربوط به FCS-MPC به طور خلاصه توضیح داده میشود. علاوه بر این، روش طراحی این طرح کنترلی بیان خواهد شد.
کنترل پیش بین مدل با مجموعه ورودی متناهی (FCS-MPC)
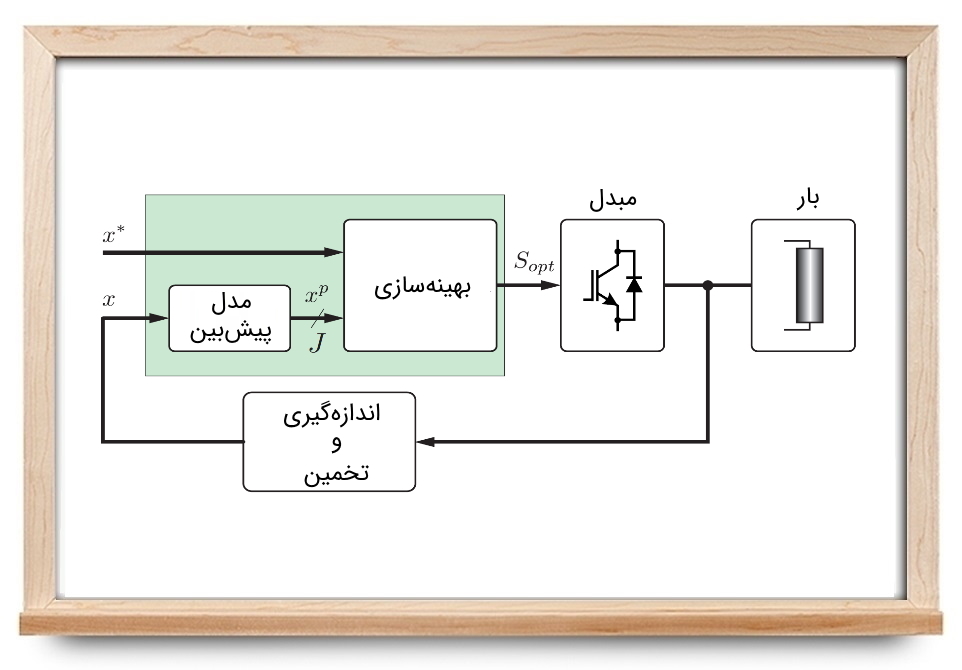
از مزیتهای بسیار مهم FCS-MPC سادگی مفهوم آن است. نحوه عملکرد این کنترلکننده بدین صورت است که در ابتدا، متغیرهای سیستم، اندازهگیری یا تخمین زده میشوند، سپس مدل سیستم با توجه به متغیرِ کنترل شده که میتواند جریان، ولتاژ، توان و... باشد، استخراج شده و گسستهسازی میشود. با گسستهسازی مدل سیستم و دانستن مقدار متغیرهای فعلی میتوان متغیرهای کنترل شده را در زمانهای آینده پیشبینی کرد.

در گام بعدی متغیرهای پیشبینی شده در یک تابع هزینه که با توجه به رفتار مطلوب مورد نظر تعریف شده، با مقادیر مرجع آن و برای تمام وضعیتهای ممکن مقایسه میشود. همانگونه که میدانیم، در مبدلهای قدرت، تعداد وضعیتهای کلیدزنی محدود به دو وضعیت به طور کامل روشن یا به طور کامل خاموش است (البته در اینجا زمان گذرای کوتاه کلیدزنی نادیده گرفته میشود). در نهایت، آن وضعیت کلیدزنی که تابع هزینه را به حداقل میرساند از بین وضعیتهای ممکن انتخاب میشود و به مبدل اعمال خواهد شد. این فرایند در گامهای نمونهبرداری بعدی تکرار میشود. شکل 3 به طور واضح، الگوریتم کنترل پیشبین مدل با مجموعه ورودی متناهی را نشان میدهد.

شکل 4 نیز نحوه کلیدزنی را نمایش میدهد. در این شکل، $$x(k)$$ متغیر کنترل شده در زمان فعلی است. همچنین، $$ x ( k + 1 ) $$ مقادیر پیشبینی شده بر اساس مدل گسسته سیستم (شامل منبع، مبدل، بار و یا شبکه) برای همه وضعیتهای کلیدزنی ممکن است. علاوه بر این، $$x _ {ref} (k+1)$$ مرجع ثابت را نشان میدهد.
فرض کنید FCS-MPC به مبدلی با سه وضعیت ممکن کلیدزنی $$S_1$$، $$ S_2$$ و $$S_3$$ در یک دوره کوتاه از زمان اعمال شود. تابع هزینه به عنوان اختلاف بین متغیر کنترل شده و مقدار مرجع آن تعریف شده که باید به منظور ردیابی مرجع به حداقل برسد. متغیر کنترل شده در گام زمانی بعدی برای تمام وضعیتهای کلیدزنی پیشبینی میشود و با مقدار مرجع مقایسه میگردد. در لحظه $$t_k$$، چون $$S_3$$ حداقل فاصله را تا مقدار مرجع فراهم میکند انتخاب میشود و این وضعیت در زمان $$t_{k+1}$$ به مبدل اعمال خواهد شد. پس از آن، این روند در یک گام جلوتر نیز تکرار می شود. با تکرار این رویه در $$t_{k+1}$$، کلید $$S_2$$ انتخاب میشود و تمام مراحل دوباره تکرار خواهد شد. شایان ذکر است که $$x(k)$$ را میتوان به طور مستقیم اندازهگیری کرد یا با استفاده از روشهای مختلف تخمین زد. همچنین زمان نمونه برداری، $$T_s$$ است.

به طور خلاصه میتوان گفت که طراحی FCS-MPC سه مرحله اصلی دارد:
- به دست آوردن مدل سیستم و گسستهسازی آن برای پیشبینی متغیرها در آینده
- شناسایی تمام وضعیتهای کلیدزنی ممکن برای مبدل
- تعریف یک تابع هزینه که تضمین کننده رفتار مطلوب سیستم است.
در ادامه نکات مربوط به مراحل اصلی طراحی FCS-MPC بیان خواهد شد.
مدل ریاضی، گسستهسازی و پیشبینی
به منظور پیشبینی متغیرهای کنترل شده باید ابتدا مدل سیستم را به دست آورد و سپس گسسته کرد. مدل ریاضی سیستم بر اساس قوانین پایهای و ساده فیزیکی و روابط حاکم بر عناصر موجود در مدار و ارتباط آنها با یکدیگر به دست میآید. این مدل معمولاً یک یا چند معادله دیفرانسیل است که به عنوان مدل سیستم در فضای حالت بیان میشود. پس از آن، مدل گسسته سیستم به دست خواهد آمد.
از چند روش تقریبی یا دقیق میتوان برای به دست آوردن یک مدل گسسته در زمان برای محاسبه پیشبینی متغیرها در FCS-MPC استفاده کرد. نتایج حاصل از روشهای تقریبی گسستهسازی مانند روش اویلر برای سیستمهای ساده مناسب بوده و با دقت قابل قبولی همراه است. فرض کنید $$x$$ متغیر کنترل شده و $$u$$ نشان دهنده متغیر ورودی و معادله دیفرانسیل مربوط به سیستم به صورت زیر باشد:
$$ \large \frac { d x } { d t } = f ( u , x ) \; \; \; \; \; \; \; ( 1) $$
میتوان با استفاده از روش اویلر مشتق را به صورت زیر گسسته کرد:
$$ \large \frac {dx } { d t } = \frac { x ( k + 1) - x ( k ) } { T _ s } \; \; \; \; \; \; \; ( 2 ) $$
که در آن، $$T_s$$ زمان نمونهبرداری است. در این صورت میتوان مقدار متغیر را در لحظه بعدی پیشبینی کرد:
$$ \large x ( k + 1 ) = x ( k ) + T _ s f ( x ( k ) , u ( k ) ) \; \; \; \; \; \; \; ( 3 ) $$
اگرچه این روش برای پیشبینی مناسب است، اما اگر زمان نمونهبرداری بیش از حد طولانی شود، این تقریب سبب ناپایداری سیستم خواهد شد. همچنین، تقریب اویلر برای سیستمهای پیچیدهتر و با مرتبه بالاتر ممکن است با خطای غیرقابل قبول در مدل همراه باشد. بنابراین هنگامی که با سیستمهای پیچیدهتر و با مرتبه بالاتر سر و کار داریم، روشهای دقیقتر گسستهسازی مورد نیاز است. استخراج مدل گسسته به ویژه برای یک سیستم LTI را به صورت دقیق میتوان با استفاده از روش نگهدار مرتبه صفر (ZOH) برای یک زمان نمونهبرداری خاص به صورت دقیق انجام داد. بدین منظور فرض کنید مدل فضای حالت زیر داده شده است:
$$ \large \frac { d x } { d t } = A x + B u \; \; \; \; \; \; \; ( 4 ) $$
که در آن، $$A$$ و $$B$$ به ترتیب ماتریس حالت و ورودی هستند. با استفاده از روش ZOH و با زمان نمونهبرداری $$T_s$$، میتوان مدل گسسته دقیق زیر را به دست آورد و متغیر را پیشبینی کرد:
$$ \large x ( k + 1 ) = A _ d x ( k ) + B _ d u ( k ) \; \; \; \; \; \; \; ( 5 ) $$
که در آن، $$ A _ d = e ^ {A T _ s } $$ و $$ B _ d = \int _ 0 ^ { T _ s } e ^ { A \tau} B d \tau $$.
شناسایی وضعیتهای ممکن کلیدزنی
پس از مدلسازی سیستم، تمام وضعیتهای ممکن کلیدزنی و روابط آنها با متغیرهای ورودی و حالت باید تعیین شود. با در نظر گرفتن تنها دو وضعیت برای کلید (خاموش و روشن)، میتوان محاسبه وضعیتهای کلیدزنی ممکن را ساده کرد. در نتیجه، تعداد کل وضعیتهای کلیدزنی با توجه به پیکربندی مبدل محاسبه خواهد شد. برخی از وضعیتها مانند آنهایی که در آن لینک DC منجر به اتصال کوتاه میشود مجاز نیست. به عنوان یک قانون کلی، تعداد وضعیتهای ممکن برای یک مبدل با $$m$$ شاخه که در هر شاخه $$n$$ وضعیت کلیدزنی وجود دارد، $$n ^ m $$ است. برای مثال، برای یک مبدل سه فاز دو سطحی، $$ 2 ^ 3 = 8 $$ وضعیت ممکن برای کلیدزنی وجود دارد.
تعریف تابع هزینه
تابع هزینه تمایز اصلی MPC با دیگر استراتژیهای کنترل پیشبین است. اساساً این ویژگی تابعی جمعی است که شامل زیر توابع مختلف نشان دهنده خواستههای ما از سیستم کنترل است.
تابع هزینه شامل حداقل یک بخش ردیابی مرجع متغیر کنترل شده است که میتواند جریان، ولتاژ، گشتاور و غیره باشد. همچنین به عنوان جملههای اضافه، میتوان محدودیتهای سیستم را به تابع هزینه افزود و به طور همزمان در نظر گرفت و عملکرد سیستم را بهینه کرد. این محدودیتها میتواند به حداقل رساندن فرکانس کلیدزنی، به حداقل رساندن تلفات و یا رعایت حداکثر جریان مجاز باشد. به منظور تعیین ساختار تابع هزینه در موارد مختلف، ابتدا بدنه اصلی آن تعریف خواهد شد و سپس محدودیتها به آن اضافه میشود.
در صورت داشتن تنها یک متغیر کنترل شده، تابع هزینه را میتوان به شکل زیر بیان کرد:
$$ \large J =|| x _ {r e f } ( k + 1 ) - x ( k + 1 ) || \; \; \; \; \; (6)$$
که در آن، $$x _ {r e f } ( k + 1 )$$ مقدار مرجع و $$ x (k+1)$$ مقدار پیشبینی متغیر کنترل شده از مدل گسسته سیستم است. نُرم $$||\cdot||$$ معیاری از فاصله بین $$x _ {ref}$$ و $$x$$ است و میتوان آن را به عنوان یک قدر مطلق، مربع و یا مقدار انتگرال خطای بین آنها در یک دوره نمونهبرداری نوشت:
$$ \large J = | x _ { r e f} ( k + 1 ) - x ( k + 1 ) | \; \; \; \; \; (7)$$
$$ \large J = ( x _ { r e f } ( k + 1 ) - x ( k + 1 ) ) ^ 2 \; \; \; \; \; ( 8 )$$
$$ \large J = \frac { 1 } { T _ s } \int _ {T_s} ( x _ { r e f } - x ) ^ 2 dt \; \; \; \; \; ( 9 )$$
تفاوت بین معادله اول و دوم این است که محاسبه دومی، به هزینه محاسباتی بیشتری نیاز دارد. با این حال، خطای مطلق و مربع منجر به نتایج مشابهی در یک تابع هزینه تکجملهای میشود. در حالی که، مربع خطا برای زمانی که تابع هزینه شامل جملههای اضافه باشد بهتر است. انتگرال خطا در معادله (۹) همه مقادیر پیشبینی شده را در بازه $$T_ s $$ در بر میگیرد. بنابراین، مقدار متوسط خطا منجر به ردیابی دقیقتر مرجع میشود، هرچند محاسبه آن را پیچیدهتر میکند و زمان محاسباتی افزایش خواهد یافت.
اگر متغیرهای اصلی کنترل شده سیستم بیش از یکی باشد، دو گزینه مختلف برای تابع هزینه وجود دارد. اگر تمام متغیرهای کنترل شده ماهیت مشابه و یا واحد مشابه داشته باشند، تابع هزینه را میتوان به صورت مجموع خطاها بین مقدار پیشبینی شده و مقدار مرجع نوشت. اما اگر متغیرهای کنترل شده ماهیت مختلف داشته باشند، یک عامل وزنی برای تنظیم واحدها برای کنترلکننده مورد استفاده قرار میگیرد. در واقع، عامل وزنی یک ضریب ثابت مثبت است که اهمیت متغیرهای کنترل شده را تنظیم میکند. روش پیدا کردن عامل وزنی تجربی است و با سعی و خطا تعیین میشود. همچنین به منظور جبران تفاوت واحد در نرمالیزه کردن متغیرها از ضریب وزنی استفاده میشود.
اضافه کردن محدودیتهای سیستم به تابع هزینه یکی از ویژگیهای قابل توجه MPC است. این محدودیتها را میتوان با عوامل وزنی به سادگی به تابع هزینه اضافه کرد که اجازه میدهند سطحی از مصالحه بین اهداف کنترلی ایجاد شود. در نتیجه، تمام الزامات کنترل به طور همزمان و بدون نیاز به کنترلهای اضافه برآورده خواهند شد؛ مزیتی که در کنترلکنندههای کلاسیک دیده نمیشود. با این حال، برای اضافه کردن جملهها به تابع هزینه، تأثیر جملههای اصلی تا حدی کاهش پیدا میکند.
در ادامه، برخی از مهمترین محدودیتهایی را که میتوان به تابع هزینه افزود توضیح میدهیم.
کمینهسازی فرکانس کلیدزنی: میزان یا تعداد وضعیتهای کلید که در هر زمان نمونهبرداری تغییر میکند، با اضافه کردن یک جمله همراه با یک عامل وزنی مناسب به حداقل میرسد:
$$ \large J = ( x _ { r e f} ( k + 1 ) - x ( k + 1 ) ) ^ 2 + \lambda \cdot n \; \; \; \; \; ( 10 )$$
که در آن، $$n$$ تعداد کلیدهاست که موضعشان در وضعیت کلیدزنی جدید $$S ( k + 1 )$$ از روشن به خاموش و یا بالعکس تغییر میکند. اگر بردار کلیدزنی $$S$$ به عنوان $$ S = ( S _ 1 , S _ 2 , S_ 3 , \cdots , S _ N ) $$ تعریف شود که $$S_i$$ وضعیت کلید شماره $$i$$ است و میتواند زمانی که کلید خاموش است صفر و وقتی که روشن است یک باشد، میتوان تغییر وضعیت همه کلیدها ($$N$$) را چنین محاسبه کرد:
$$ \large n = \sum _ { i = 1 } ^ N | S _i ( k + 1 ) - S _ i ( k ) | \; \; \; \; \; ( 11 )$$
کمینهسازی ریپل ولتاژ و جریان: این مورد را میتوان با یک جمله اضافه در تابع هزینه به عنوان اختلاف بین مقدار اندازهگیری شده ولتاژ در وضعیت فعلی و وضعیت آینده اجرا کرد. شکل کلی افزودن این محدودیت به صورت زیر است:
$$ \large J = || x _ {ref} ( k + 1 ) - x ( k +1 ) || + \lambda || v ( k + 1 ) -v ( k) || \; \; \; \; \; ( 12 )$$
برای کمینهسازی ریپل جریان نیز از همین روش استفاده میشود.
تعریف حداکثر جریان و ولتاژ مجاز: این محدودیت به سادگی با اضافه کردن یک جمله غیرخطی اعمال میگردد و فقط زمانی فعال میشود که مقدار متغیرهای تعیین شده بالاتر از محدودیتها باشند. به عبارت دیگر، در شرایط عادی این جمله صفر میشود و زمانی که حداکثر ولتاژ یا جریان نقض شود، یک مقدار بسیار بزرگ خواهد بود. به عنوان مثال، برای حداکثر جریان مجاز داریم:
$$ \large J = || x _ {ref} ( k + 1 ) -x ( k + 1 ) || + f _ { lim} ( i (k + 1 ) ) \; \; \; \; \; ( 13 )$$
که در آن، $$i$$ جریانی است که باید برای محافظت از تجهیزات محدود شود و $$f _ { lim} ( i (k + 1 ) )$$ یک تابع غیرخطی و به شکل زیر است:
$$ \large f _ {l i m } ( i ( k + 1 ) ) =
\begin{cases}
\infty & \text{if} \;\;\; | i ( k + 1 ) | > I _ {max} \\
0 & \text {if} \;\;\; | i ( k + 1 ) | \le I _ {max}
\end {cases}
$$
همچنین برای محدود کردن سطح ولتاژ نیز میتوان این روش را اعمال کرد.
لازم به ذکر است که هیچ روش تحلیلی یا عددی برای تنظیم عوامل وزنی وجود ندارد. آنها را میتوان به سادگی با روشهای تجربی تعیین کرد.
اگر علاقهمند به یادگیری مباحث مشابه مطلب بالا هستید، آموزشهایی که در ادامه آمدهاند نیز به شما پیشنهاد میشوند:
- آموزش الکترونیک صنعتی و مبدل ها
- آموزش الکترونیک قدرت ۱
- اینورتر منبع امپدانس (Z-source Inverter) — از صفر تا صد
- آشنایی با قطعات الکترونیک قدرت — مجموعه مقالات مجله فرادرس
- دیود هرزگرد چیست؟ — به زبان ساده
^^